| 19 мая 1971 16:22:44 - старт 17 (5) июня 1971 - коррекция 20 (21-22) ноября 1971 - коррекция 27 ноября 1971 - коррекция 27 ноября 1971- отделение СА, орбитер вышел на орбиту вокруг Марса 23 августа 1972 - объявлено о завершении работы |
19 и 28мая к планете Марс были запущены автоматические станции «Марс-2» и «Марс-3» (рис. 9).
27 ноября АС «Марс-2» впервые доставила на планету Марс капсулу, внутри которой установлен вымпел с изображением герба СССР. 2 декабря впервые в истории спускаемый аппарат АС «Марс-3» произвел мягкую посадку на поверхность Марса. Станции «Марс-2» и «Марс-3» стали искусственными спутниками планеты.
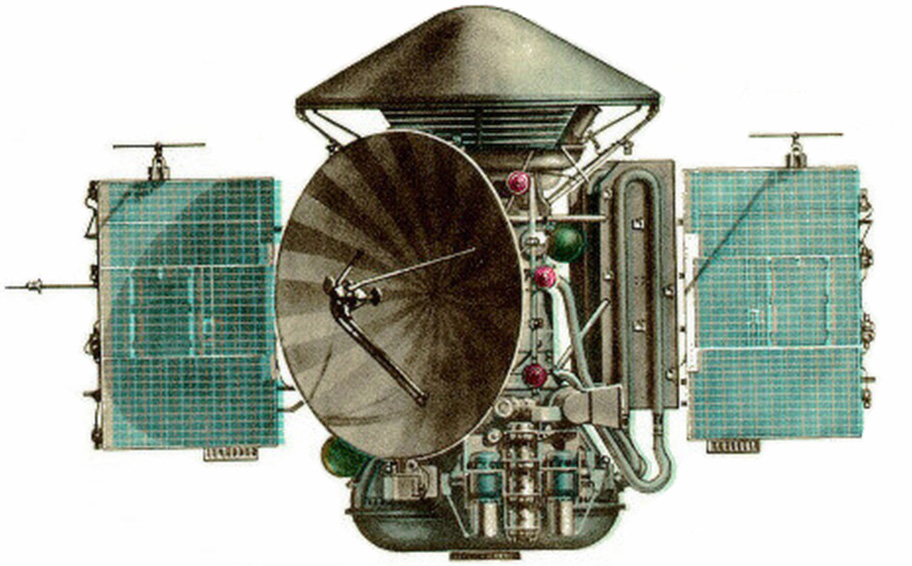
АС «Марс-3» (рис. 6) включает в себя орбитальную станцию (ОС) и спускаемый аппарат (СА) и оснащена системами автономного управления и ориентации, радиоуправления, траекторных измерений и передачи информации, автоматики, энергопитания, терморегулирования, бортовым радиокомплексом, программно-временным устройством, двигательной установкой и комплексом научной аппаратуры. АС «Марс-2» и «Марс-3» аналогичны по конструкции. Вес каждой станции 4650 кг. Конструктивно ОС состоит из следующих основных частей: приборного отсека (ПО), блока баков (ББ), двигательной установки (ДУ) с узлами автоматики, солнечной батареи, антенно-фидерного устройства, радиаторов системы терморегулирования. В ПО находятся бортовые системы станции. Снаружи размещены оптико-электронные приборы системы астроориентации на Солнце, Землю и звезду и системы автономной навигации, научная аппаратура. ПО соединен с ББ, который служит основным несущим элементом станции. В нижней части ББ расположена ДУ. Сверху имеется переходник для крепления СА. К ББ подвешены панели солнечной батареи, параболическая и малонаправленные антенны. На одной из ферм подвески панели закреплены радиаторы системы терморегулирования. На панелях солнечной батареи установлена часть научной аппаратуры, две антенны для обеспечения радиосвязи ОС с СА, антенна для проведения советско-французского эксперимента «Стерео» и микродвигатели системы ориентации и стабилизации.
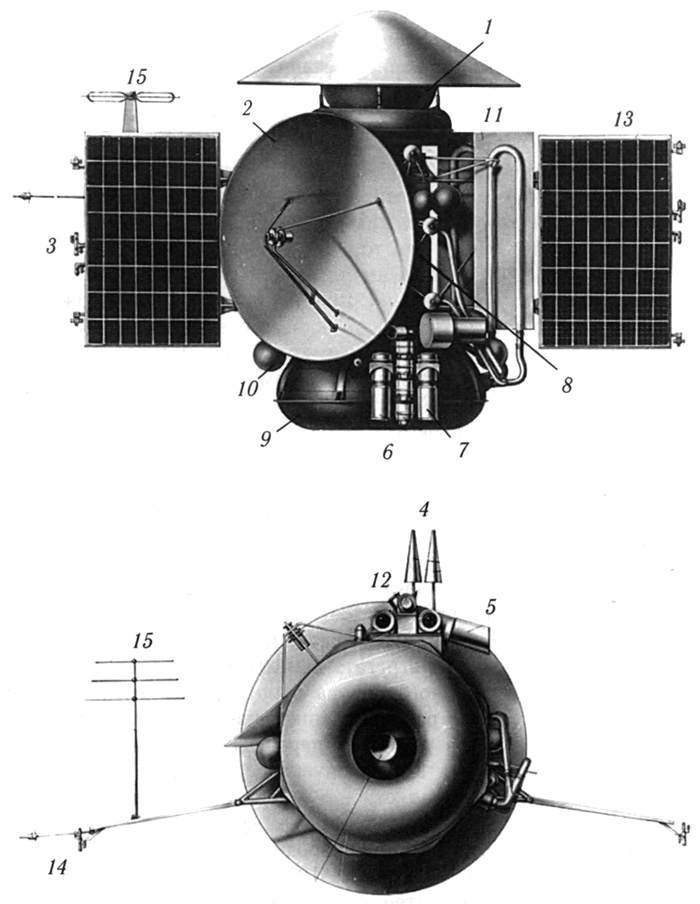
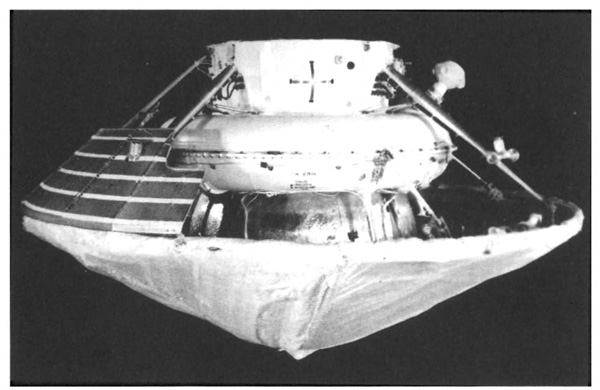
СА (рис. 7) состоит из автоматической марсианской станции (АМС), приборно-парашютного контейнера, тормозного экрана и соединительной рамы. На раме размещены твердотопливньтй двигатель перевода СА с пролетной на посадочную траекторию и агрегаты системы автономного управления для стабилизации СА после его отделения от ОС. Приборно-парашютный контейнер изготовлен в форме тора. Он установлен на верхнюю часть АМС и соединен с ней при помощи стяжных лент. Внутри контейнера помещены вытяжной и основной парашюты. На контейнере размещаются пороховой двигатель ввода вытяжного парашюта, тормозная двигательная установка мягкой посадки и двигатель увода парашюта, антенны радиовысотомера, антенны связи с ОС и научная аппаратура. Тормозной экран конической формы служит для аэродинамического торможения СА в атмосфере Марса и защиты его от возникающих при этом высоких температур.
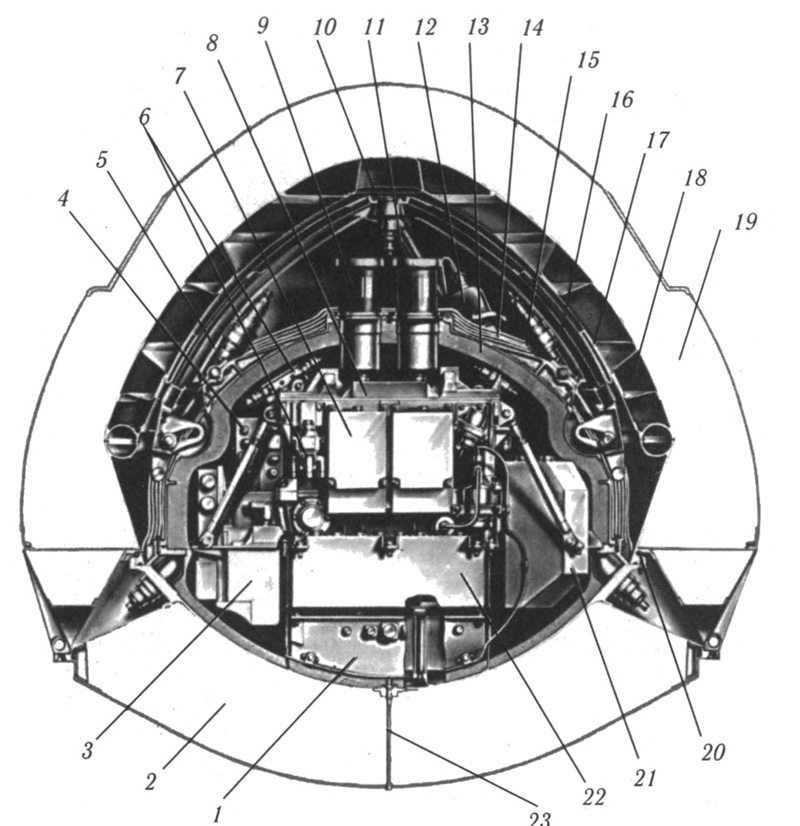
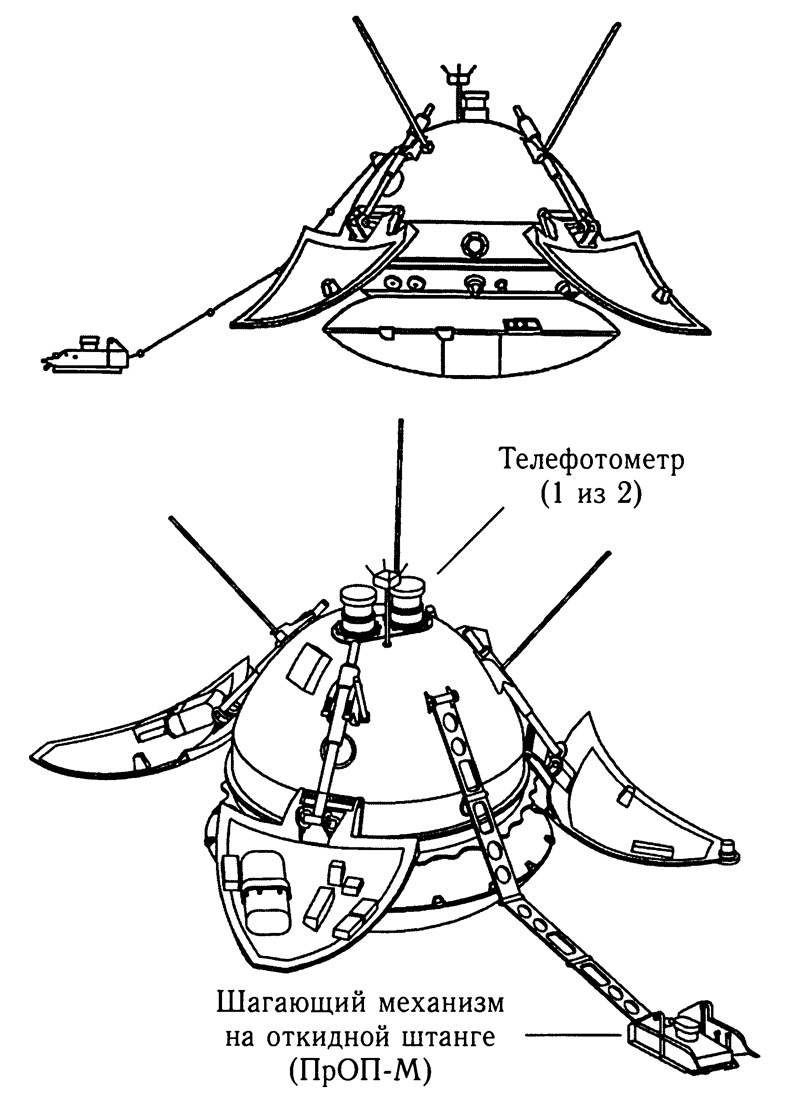
Внутри АМС расположен герметичный приборный отсек. В нем находятся аппаратура автономной системы управления, радиокомплекса и телеметрии, блоки научных приборов, в т. ч. телевизионная панорамная головка. Снаружи установлены научные приборы с механизмами их выноса, антенны радиокомплекса, системы приведения станции в рабочее положение после посадки. Необходимая последовательность работы систем обеспечивается программно-временным устройством. Система терморегулирования СА станции «Марс-3» включает экранно-вакуумную теплоизоляцию, радиационный и электрический нагреватели.
Система управления включает в себя систему ориентации, гироскопическое устройство, обеспечивающее стабилизацию станции в пространстве, бортовую цифровую вычислительную машину (БЦВМ) и систему автономной космической навигации. Система ориентации вступает в работу с момента отделения АС от последней ступени ракеты-носителя и функционирует в течение всего времени полета. Оптико-электронные приборы определяют местоположение АС относительно Солнца, и с помощью газореактивных микродвигателей АС ориентируется в пространстве в положении, обеспечивающем нормальное функционирование систем терморегулирования, энергопитания и др. С увеличением расстояния между Землей и АС система ориентации, одновременно следя за Солнцем и звездой Канопус, переводит АС в положение, при котором остронаправленная антенна ориентирована на Землю.
Система автономного управления позволяет осуществить стабилизацию и управление станцией во время работы последней ступени ракеты-носителя, при проведении коррекций траектории и торможении. При проведении первых двух коррекций в БЦВМ по радиолинии с Земли передаются данные о величине и направлении импульса тяги двигателя, необходимые для выполнения этих маневров. В БЦВМ поступает также информация с гиростабилизированной платформы о положении АС в пространстве. Обработав информацию, БЦВМ выдает команды для разворотов АС, включения и выключения двигателя, а система автономного управления выполняет эти операции.
Для выведения станции на заданную орбиту искусственного спутника Марса и обеспечения требуемых условий входа СА в атмосферу планеты используется система автономной космической навигации. Эта система позволяет скорректировать необходимым образом траекторию станции при подлете к планете. Оптико-электронный прибор определяет фактическое положение АС относительно Марса и передает данные в БЦВМ, которая рассчитывает время работы двигателя и определяет потребную для выполнения коррекции траектории ориентацию станции в пространстве.
Бортовой радиотехнический комплекс совместно с наземными средствами позволяет проводить траекторные измерения, осуществлять прием команд с Земли, вести передачу телеметрической и фототелевизионной информации, прием и запись сведений, поступающих с СА на ОС для последующей передачи их на Землю. Для связи ОС с Землей используются два радиоканала: узкополосный и широкополосный. Узкополосный канал используется для проведения траекторных измерений и передачи телеметрической информации. Он работает на радиоволнах дециметрового диапазона. Широкополосный канал, использующий сантиметровые волны, позволяет передавать большие объемы информации с фототелевизионных устройств и научных приборов. На участке полета к планете и на орбите искусственного спутника Марса радиосвязь со станцией поддерживается через систему малонаправленных антенн, а когда станция ориентирована на Землю - через параболическую антенну. В состав радиокомплекса входят приемные, передающие и программно-временные устройства, телеметрическая, телевизионная и антенно-фидерная системы.
Для снабжения электроэнергией бортовой аппаратуры используются солнечная батарея и химические источники тока. Солнечная энергия в течение всего полета обеспечивала заряд буферной батареи ОС и питание аппаратуры, работающей в перерывах между сеансами связи. Электропитание аппаратуры во время сеансов связи осуществлялось от буферной батареи. Автономная батарея СА была заряжена перед его отделением. Система терморегулирования ОС состоит из экранно-вакуумной теплоизоляции, специальных терморегулирующих покрытий и активной циркуляционной системы замкнутого типа с радиатором-нагревателем, постоянно направленным на Солнце, и радиатором-охладителем, имеющим контакт с космической средой. Теплоносителем служит газ, заполняющий ПО. Циркуляция газа обеспечивается вентиляционным устройством. ДУ обеспечивает проведение коррекций траектории движения станции и торможение при переходе ее на орбиту искусственного спутника Марса. Она состоит из жидкостного реактивного двигателя с насосной системой подачи компонентов топлива, управляющих органов и блока топливных баков.
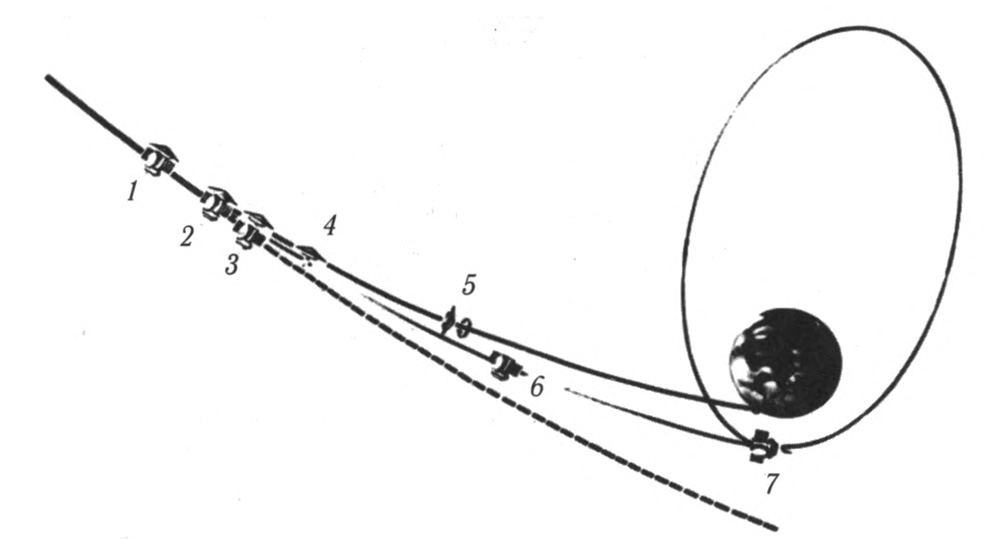
АС «Марс-2» была запущена 19 мая в 19 час 23 мин. Станция была сначала выведена на промежуточную орбиту искусственного спутника Земли. Старт с околоземной орбиты к Марсу был осуществлен в 20 час 59 мин. Последняя ступень ракеты-носителя сообщила АС скорость, близкую ко 2-й космической. Запуск АС «Марс-3» состоялся 28 мая в 18 час 26 мин. Схема вывода АС «Марс-3» на траекторию полета к Марсу аналогична схеме вывода АС «Марс-2». Во время полета к Марсу для обеспечения необходимой точности сближения с планетой назначения проводились коррекции траекторий движения станций. После выполнения третьей коррекции 27 ноября АС «Марс-2» вышла на траекторию, проходящую на расстоянии 1380 км от поверхности Марса. От нее была отделена капсула, достигшая планеты. В тот же день в 23 час 19 мин начался маневр торможения. В результате скорость станции уменьшилась и она перешла на орбиту искусственного спутника Марса. 2 декабря, после проведения третьей, заключительной коррекции, в 12 час 14 мин от АС «Марс-3» отделился СА. Орбитальная станция продолжала полет по траектории, проходящей на расстоянии 1500 км от поверхности планеты. Тормозная ДУ обеспечила перевод ОС на околомарсианскую орбиту.
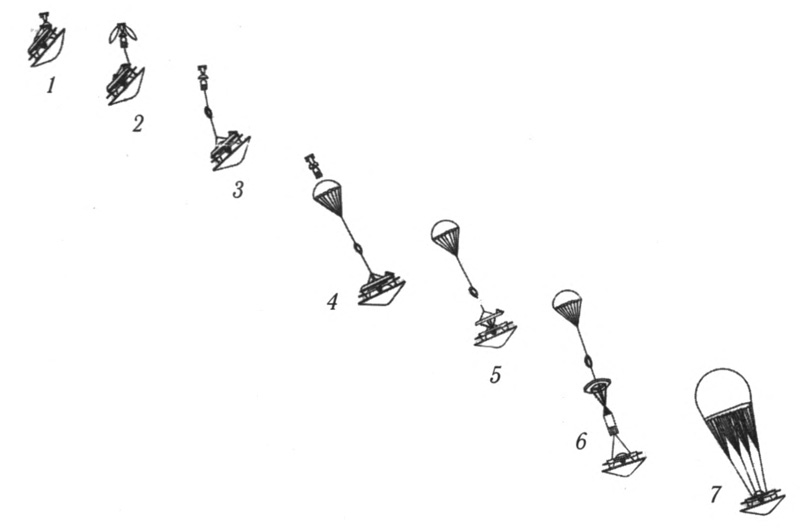
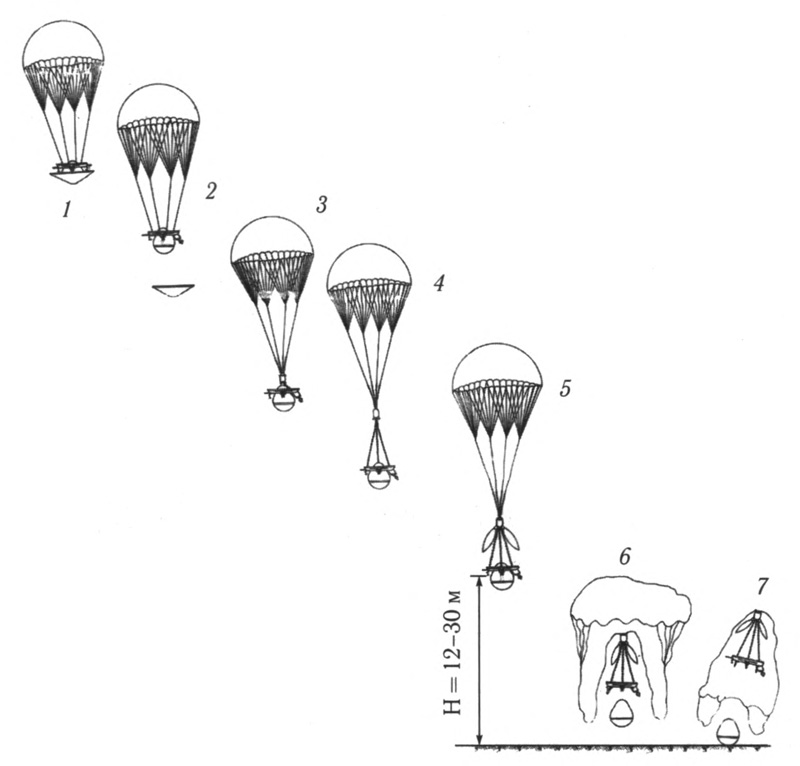
Схема спуска СА на поверхность Марса приведена на рис. 8. Двигатель СА, обеспечивший перевод аппарата на траекторию встречи с планетой, включился через 15 мин после разделения СА и ОС. Затем был осуществлен разворот СА для обеспечения необходимого угла атаки при движении в атмосфере. В 16 час 44 мин началось аэродинамическое торможение, во время которого устойчивость движения СА обеспечивалась за счет его формы. Спуск в атмосфере до поверхности Марса продолжался немногим более 3 мин. В конце участка торможения по команде от датчика перегрузки еще при сверхзвуковой скорости полета был введен вытяжной парашют, а затем и основной парашют с зарифованным куполом. Когда СА затормозился до околозвуковой скорости, по сигналу от программно-временного механизма было проведено полное раскрытие купола парашюта. Одновременно был сброшен аэродинамический конус и открылись антенны радиовысотомера системы мягкой посадки. На высоте 20-30 м по команде радиовысотомера был включен тормозной двигатель мягкой посадки и программно-временное устройство, задающее последовательность операций при работе АМС на поверхности планеты. Парашют в это время был уведен в сторону другим реактивным двигателем, чтобы купол не закрыл станцию. В момент посадки специальное амортизационное устройство защитило АМС от возможных повреждений.
Точка посадки автоматической марсианской станции расположена в южном полушарии Марса между областями Электрис и Фаэтонтис в районе с координатами 45° ю. ш. и 158° з. д. На ее боргу установлен вымпел с изображением герба СССР. Через 1,5 мин после посадки АМС была приведена в рабочее состояние, и в 16 час 50 мин 35 сек началась передача видеосигналов с поверхности планеты. Они были приняты и записаны на борту искусственного спутника «Марс-3» и затем в сеансах радиосвязи переданы на Землю. Принятые с поверхности Марса видеосигналы были непродолжительными (около 20 сек) и резко прекратились.
С помощью приборов станций «Марс-2» и «Марс-3» была выполнена весьма обширная и многообразная программа научных исследований. Во время полета по трассе Земля - Марс спектрометры ионов и электронов регулярно выполняли измерения энергии частиц солнечного ветра, состав частиц, температуры и скорости отдельных компонентов солнечной плазмы. Магнитометры проводили измерения параметров межпланетных магнитных полей. Определялась электронная концентрация в межпланетной среде, для чего использовались данные о характере распространения радиоволн на двух когерентных частотах. На АС «Марс-3», кроме того, проводился совместный советско-французский эксперимент «Стерео» по изучению радиоизлучения Солнца. При этом исследовались пространственная структура, направленность и механизм процесса излучения. Та же аппаратура использовалась для научных исследований, проводимых с орбиты искусственного спутника Марса. Изучался характер обтекания планеты солнечным ветром и его взаимодействие с ионосферой Марса, регистрировались спектры заряженных частиц и вариации магнитного поля.
На спускаемом аппарате АС «Марс-3» была установлена научная аппаратура для измерения температуры и давления атмосферы, определения химического состава атмосферы, измерения скорости ветра, определения химического состава и физико-механических свойств поверхностного слоя, а также получения панорамы с помощью телевизионных камер. Внезапное прекращение сигналов с АМС не позволило получить научную информацию.
Для проведения исследований характеристик атмосферы и поверхности планеты на орбитальных станциях «Марс-2» и «Марс-3» была установлена следующая научная аппаратура: инфракрасный радиометр для измерения яркостной температуры планеты в диапазоне 8- 40 мкм; инфракрасный фотометр для изучения рельефа поверхности по интенсивности полос поглощения СO2; инфракрасный фотометр для определения содержания водяного пара в атмосфере Марса; сканирующий фотометр для изучения распределения яркости планеты в диапазоне 3600-7000Ằ; радиотелескоп для измерения радиоизлучения Марса на волне 3,4 см, позволяющий определить интенсивность и поляризацию радиоизлучения поверхностного слоя планеты; ультрафиолетовый фотометр для определения плотности верхней атмосферы Марса и содержания в ней атомарного кислорода, водорода и аргона; две фототелевизионные камеры с различными фокусными расстояниями. Атмосфера Марса исследовалась также путем измерений преломления радиоволн, излучаемых автоматической станцией при ее заходах за диск планеты.
Автоматические станции «Марс-2» и «Марс-3» функционировали более восьми месяцев.
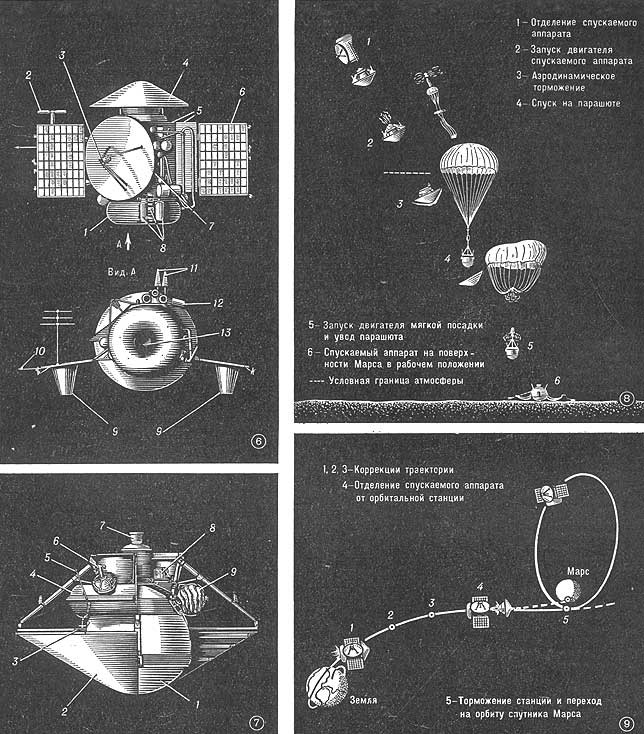 Рис. 6. Автоматическая станция «Марс-3»: 1 - приборный отсек; 2- антенна научной аппаратуры «Стерео»; 3 - остронаправленная параболическая антенна; 4 - спускаемый аппарат; 5 - радиаторы системы терморегулирования; 6 - панель солнечной батареи; 7 - блок баков двигательной установки; 8 - оптико-электронные приборы системы астроориентации; 9 - антенны связи со спускаемым аппаратом; 10 - магнитометр; 11 - малонаправленные антенны; 12 - оптико-электронный прибор системы автономной навигации; 13 - корректирующий и тормозной двигатель. Рис. 7. Спускаемый аппарат станции «Марс-3»: 1 - автоматическая марсианская станция; 2 - аэродинамический тормозной конус; 3 - антенна радиовысотомера; 4 - парашютный контейнер; 5 - антенны связи с орбитальной станцией; 6 - двигатель ввода вытяжного парашюта; 7 - двигатель увода спускаемого аппарата; 8 - приборы и аппаратура системы автоматического управления; 9 - основной парашют. Рис. 8. Схема посадки спускаемого аппарата станции «Марс-3». Рис. 9. Схема межпланетного перелета станций «Марс-2» и «Марс-3». |
На борту искусственных спутников Марса - АМС «Марс-2» и «Марс-3» проводилось 11 научных экспериментов. Семь из них связаны с изучением самой планеты, три - с измерениями параметров межпланетной среды и один, выполнявшийся совместно с французскими учеными,- с исследованием радиоизлучения Солнца. Почти все приборы станций были ориентированы так, что при прохождении периареса они «смотрели» на планету. Поверхность Марса просматривалась приборами в течение примерно 30 мин. При этом оси приборов пересекали планету приблизительно по половине большого круга. Инфракрасный радиометр, принимавший излучение планеты в дальней части инфракрасного диапазона в области длин волн 8-40 мкм, измерял температуру поверхности вдоль трассы полета. Трассы начинались в южном полушарии, где в исследуемый период подходило к концу марсианское лето, пересекали затем экватор и заканчивались в северном полушарии. Начальные точки трасс приходились на области, где было еще утро, а конечные - на послеполуденные, вечерние, иногда даже ночные часы. Температура вдоль трасс менялась поэтому в широких пределах: от +13 °С (для 11° ю. ш. в 14 час местного солнечного времени) до -93 °С (19° с. ш., в 19 час местного времени). А в области северной полярной шапки температура падала ниже -110°С. Измеренная разность температур между морями и континентами составляет около 10° вблизи местного полудня и может быть объяснена различием в альбедо.
Бортовой радиотелескоп измерял интенсивность и поляризацию радиоизлучения на длине волны 3,5 см вдоль той же трассы. Он определял температуру грунта на глубине 30-50 см. Как показывают результаты измерений, температура под поверхностью на указанной глубине не испытывает суточных колебаний. Кроме температуры, определялась также диэлектрическая постоянная грунта. Измерения свидетельствуют, что изменения температуры грунта и диэлектрической постоянной связаны: большим значениям температуры отдельных участков соответствуют большие значения диэлектрической постоянной. Это означает, что плотность грунта меняется вдоль трассы измерений. По-видимому, когда значения диэлектрической постоянной велики, материал грунта находится в раздробленном состоянии.
Инфракрасный фотометр измерял поглощение в полосе углекислого газа с длиной волны 2,06 мкм. При обработке результатов измерений вычислялась эквивалентная ширина полосы поглощения СО2, для чего использовались также данные лабораторной калибровки прибора, сведения о составе марсианской атмосферы, ее шкале высот и температуре. Эквивалентная ширина позволяет вычислить давление у поверхности. Различия в давлении пересчитывались в разности высот и так оценивалась высота гор и глубина впадин. На среднем уровне давление на Марсе принималось равным 6 мб.
Трасса, прочерченная станцией «Марс-3» 16 февраля 1972 г., проходила через южную оконечность Hellospontus, северо-восточный край Hellas, темные области Lapigia и Syrtis Major, через Мегое и в районе Umbra захватывала край северной полярной шапки. Самой высокой областью оказалась Syrtis Major (около 3,5 км), самой низкой - окраина Hellas (-1 км) и район к северу от Syrtis Major (от 0 до + 1 км).
Когда станции «Марс-2» и «Марс-3» вышли на околомарсианские орбиты, над планетой бушевала пылевая буря. В течение декабря поверхность Марса была закрыта пылевой бурей, в январе пыль осела и измерения, проведенные в начале февраля, свидетельствовали о полном исчезновении всех связанных с ней явлений. Измерения, проведенные инфракрасным фотометром в декабре, показали, что высота пылевых облаков составляет около 10 км над средним уровнем поверхности. Над более высокими областями слой облаков тоньше, над низкими - толще. Анализ данных научных измерений станций «Марс» показывает, что средний радиус пылевых частиц около 1 мкм. Такие частицы должны оседать очень медленно, что согласуется с общей продолжительностью пылевой бури. С другой стороны, снимки с американского аппарата «Маринер-9», сделанные в конце декабря, показывают существенное увеличение прозрачности атмосферы Марса за 10 суток. Это можно объяснить наличием в пылевых облаках некоторой доли быстро оседающих частиц сравнительно большого размера - около 10 мкм. С помощью фотометра для изучения распределения яркости по планете в диапазоне 0,36-0,7 мкм неоднократно наблюдались облака, видимые в синих лучах (λ = 0,36 мкм) и незаметные в красных лучах (λ = 0,7 мкм). Такие облака должны состоять из частиц размером много меньше микрона. В общем, в марсианских облаках в период пылевой бури, видимо, содержались частицы разных размеров, причем соотношение их менялось по времени. Атмосфера Марса и ее облачный слой в целом во время бури менее прозрачные для солнечного излучения, чем для планетарного. Значительная часть солнечной энергии захватывается атмосферой, температура ее повышается, а температура поверхности падает по сравнению с нормальными условиями. Пыль, по-видимому, и в условиях нормальной прозрачности марсианской атмосферы играет заметную роль в ее тепловом режиме. Большая роль пыли в тепловом режиме атмосферы Марса отмечалась и ранее, однако только наблюдения во время пылевой бури подтвердили указанное явление.
Узкополосный инфракрасный фотометр на полосу поглощения водяного пара 1,38 мкм показал, что содержание водяного пара в течение всего периода исследований не превышало 5 мкм осажденной воды - в тысячи раз меньше, чем в земной атмосфере. Эта величина на порядок меньше, чем обнаруживалось ранее в ряде наземных наблюдений. Возможно, что уменьшение влажности связано с сезоном. По времени оно совпало с пылевой бурей. Не ясно, является ли это совпадение случайным. Существенно, что не найдено пока сильных локальных флюктуации содержания Н20 в атмосфере, «оазисов» с повышенной влажностью. Отмечены только относительно плавные изменения влажности по трассе, если не считать скачка в области северной полярной шапки.
Ультрафиолетовый фотометр регистрировал солнечное излучение, рассеянное атомами водорода и кислорода в верхней атмосфере Марса на высотах от ста до нескольких десятков тысяч километров. Данный прибор при прохождении станцией периареса был направлен на «горизонт» планеты, т. е. касательно к поверхности Марса. Он регистрировал излучение атомарного кислорода в трех близко расположенных линиях с длиной волны 1300 Ằ и излучение атомарного водорода с длиной волны 1216Ằ. По наблюдениям интенсивности в этих линиях были рассчитаны плотность рассеивающих атомов и их температура. Вблизи поверхности атмосфера Марса состоит в основном из углекислого газа, однако на высоте около 100 км под действием солнечного ультрафиолетового излучения он распадается на молекулу угарного газа и атом кислорода. Такой же процесс распада водяного пара приводит к появлению атомов водорода, которые в 16 раз легче атомов кислорода. В связи с этим выше 300-400 км атмосфера Марса становится в основном атомарно-водородной. Все же следы кислорода отмечаются до высоты 700- 800 км, где его концентрация равна ста атомам в 1 см3. Плотность более легкого водорода падает очень медленно, уменьшаясь от 10 000 атомов в 1 см3 около планеты до 100 и даже меньше атомов на расстоянии 10 000 км. В области высот от 100 до 200 км температура верхней атмосферы возрастает, а выше остается постоянной. Верхняя атмосфера Марса больше похожа на атмосферу Венеры, нежели на верхнюю атмосферу Земли. По-видимому, это связано с тем, что углекислый газ преобладает в атмосфере и Марса и Венеры.
На основе анализа сигналов радиопередатчиков сантиметрового диапазона в периоды, когда станции заходили за край планеты или выходили из-за него, изучалась ионосфера Марса. Ионосфера на планете Марс «прижата» к поверхности: максимум электронной плотности расположен на высоте 140 км (для земной ионосферы на высоте 300 км). На высотах около 110 км наблюдался второй максимум, электронная концентрация в котором примерно в 3 раза ниже. На борту станций был размещен также комплекс из трех приборов, предназначенный для исследования магнитного поля и заряженных частиц в окрестностях Марса. С помощью феррозондового магнитометра проводились измерения магнитного поля вблизи планеты. Обнаружены изменения магнитного поля, в 8 раз превышающие уровень межпланетного фона. Интенсивность поля с приближением к Марсу возрастала по всем трем компонентам магнитометра. Возможно, что Марс обладает собственным магнитным полем дипольного характера. По измерениям при помощи электронных ловушек на спутнике «Марс-3» обнаруживается закономерный рост потока электронов и электронной температуры вблизи периареса по мере приближения спутника к планете. Вместе с тем был зарегистрирован также участок с горячим электронным газом вдали от периареса на расстоянии 180-200 тыс. км от планеты. Спектрометр заряженных частиц, регистрирующий ионы солнечного ветра в диапазоне энергий не более 10 кэв, показал вблизи Марса наличие зоны тепловых ионов. Форма внешней границы этой зоны и величина скачка скорости потока в солнечном ветре позволяют предположить наличие ударной волны при взаимодействии солнечного ветра с верхней атмосферой Марса.
В комплексе экспериментов, проводившихся на спутниках «Марс-2» и «Марс-3», фотографированию планеты отводилась вспомогательная роль. Вместе с тем снимки, выполненные на «Марсе-3» с больших расстояний, позволяют уточнить сжатие планеты, строить профили рельефа по изображению края диска на участках большой протяженности, получить цветные изображения диска Марса путем синтезирования фотоизображений, сделанных с различными светофильтрами. На фотоснимках обнаружены интересные сумеречные явления, в частности свечение атмосферы приблизительно на 200 км за линию терминатора, изменение цвета поверхности вблизи терминатора. На некоторых снимках прослеживается слоистая структура марсианской атмосферы.
*На пресс-конференции 18 ноября С.Д.Куликов назвал еще одну вероятную причину аварий посадочных аппаратов станций "Марс-2", "Марс-3" и "Марс-6". Оказывается, установленные на ПА радиовысотомеры в условиях большого количества окислов железа (на что разработчики не рассчитывали) работали нештатно, а неверное определение высоты влекло повреждение станции при посадке с нерасчетной скоростью. |
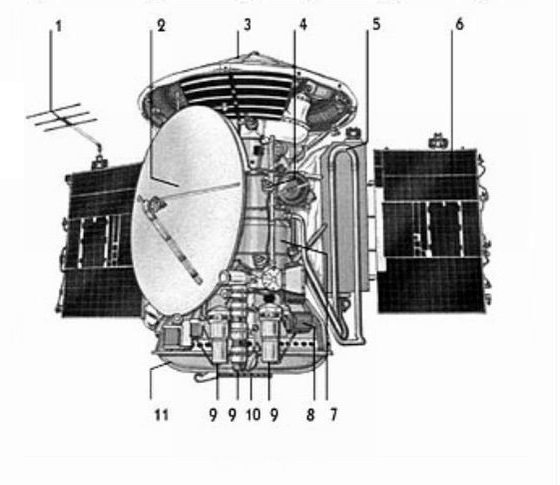 Объект М-71: 1 - антенна научной аппаратуры «Стерео»; 2 - параболическая остронаправленная антенна; 3 - спускаемый аппарат; 4 - малонаправленные антенны; 5 - радиаторы системы терморегулирования; 6 - панель солнечной батареи; 7 - блок топливных баков; 8 - звездный датчик; 9 - земной датчик; 10 - корректирующая тормозная двигательная установка; 11 - приборный отсек |
| 27 ноября 1971 - отделение СА T+15 мин - включился тормозной двигатель неверный угол входа в атмосферу, СА разбился в районе 4° с .ш. и 47° з.д. (Долина Нанеди в Земле Ксанфа) |
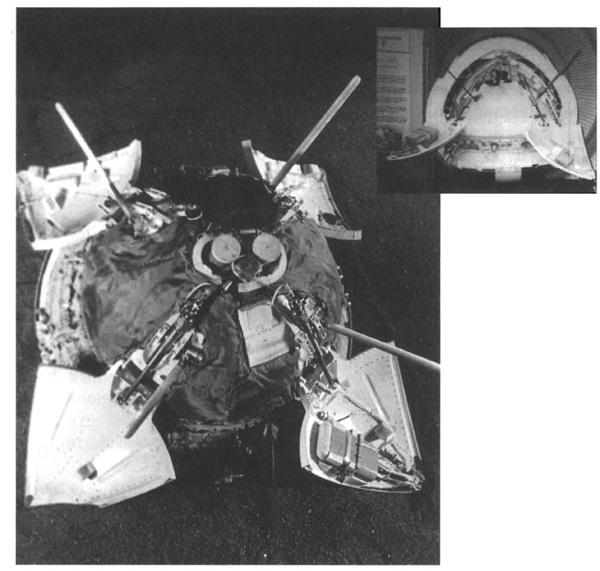
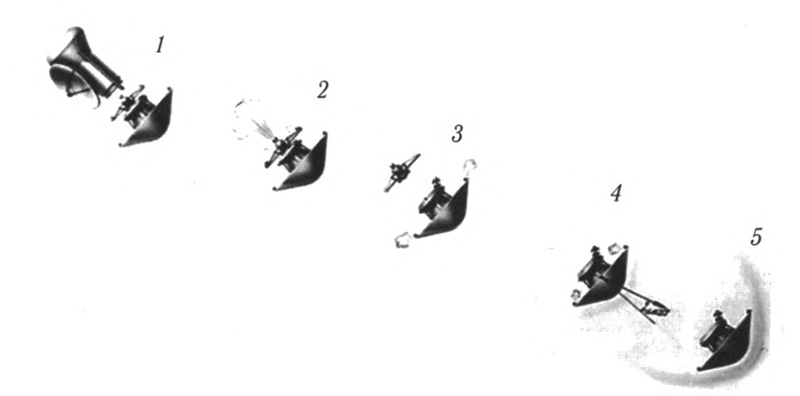
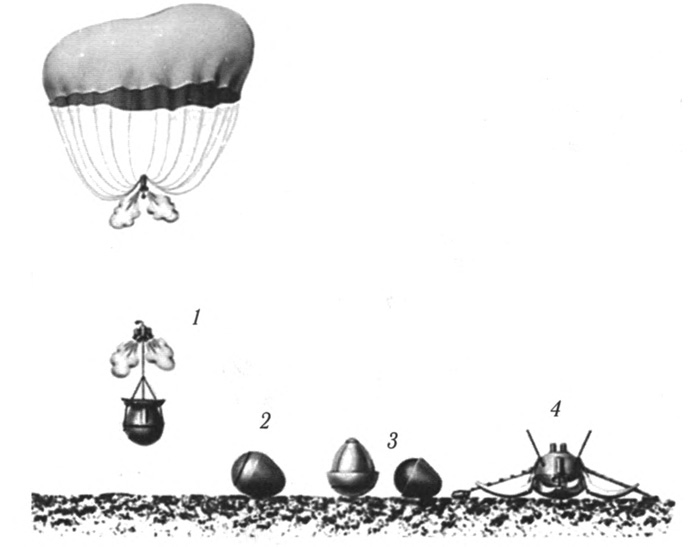 Этапы посадки посадочного аппарата космической станции «Марс-71»: 1 - запуск двигательной установки мягкой посадки, увод парашюта в сторону ракетой, 2 - сброшенный посадочный аппарат приходит в состояние покоя на поверхности, 3 - чтобы сбросить верхнюю крышку посадочного аппарата, надувается воздушный шар (справа), 4 - в верхней полусфере раскрываются лепестки для стабилизации посадочного аппарата, развертываются антенны и штанги; включаются телекамера и научные приборы
Этапы посадки посадочного аппарата космической станции «Марс-71»: 1 - запуск двигательной установки мягкой посадки, увод парашюта в сторону ракетой, 2 - сброшенный посадочный аппарат приходит в состояние покоя на поверхности, 3 - чтобы сбросить верхнюю крышку посадочного аппарата, надувается воздушный шар (справа), 4 - в верхней полусфере раскрываются лепестки для стабилизации посадочного аппарата, развертываются антенны и штанги; включаются телекамера и научные приборы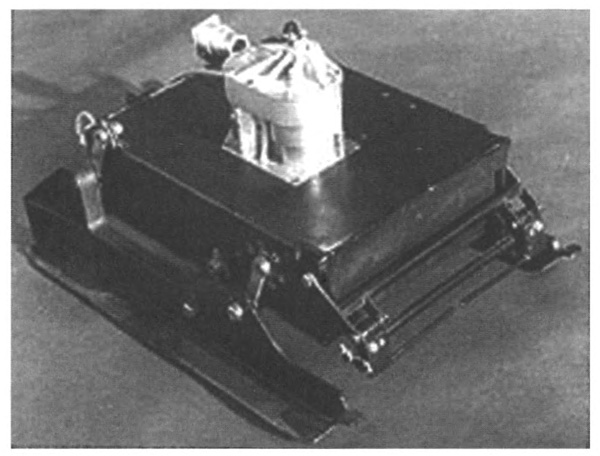
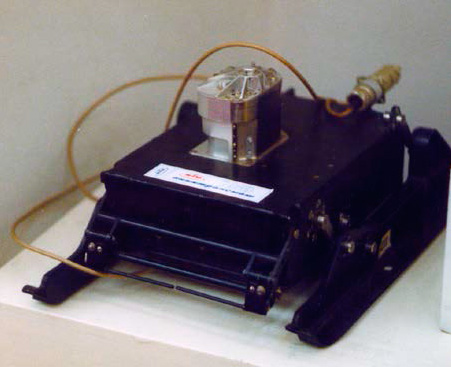 Модель мобильного устройства PrOP-M, которое было установлено на советских марсианских кораблях для миссий 1971 года. Они были способны отойти на 15 метров от спускаемого аппарата, будучи соединённые проводом. |