вернёмся к началу?
III. ИЗУЧЕНИЕ ЛУНЫ ПО ПРОГРАММЕ RANGER
1. Программа создания космических аппаратов Ranger
В 1959 г. NASA был разработан и 21 декабря 1959 г. принят план дальнейшего изучения Луны, предусматривавший создание аппаратов Ranger («Странник»). Руководство работами no программе Ranger до 1963 г. осуществлялось Лабораторией реактивного движения Калифорнийского политехнического института, работавшей по контрактам NASA. В марте 1963 г. был заключен контракт NASA с фирмой Northrop Corp., сначала некоторое время работавшей совместно с Лабораторией реактивного движения, а затем ставшей головной по разработке и изготовлению аппаратов Ranger (19).
Изучение Луны по программе Ranger планировалось в несколько последовательных этапов. На первом этапе предполагались запуски аппаратов с фотоустановкой для получения снимков лунной поверхности до момента падения аппарата на Луну. На втором этапе (весна 1961 г.) —доставка аппарата к Луне и отделение от него на расстоянии около 30— 40 км от Луны контейнера с научным оборудованием; установленным на контейнере тормозным двигателем скорость падения должна была снижаться до 150 м/сек. Предполагалось создание аппарата весом 360 кГ, в т. ч. приборный контейнер 45 кГ (без тормозного двигателя) и тормозной двигатель— 90 кГ. В контейнере устанавливаются сейсмометр, приборы для измерения температуры и телевизионная камера для получения изображений лунной поверхности перед падением. Амортизатором при падении контейнера служит разрушающаяся сотовая конструкция. Были заключены контракты NASA на изготовление контейнера — с Ford Motor, тормозного двигателя—с Thiokol Chemical-Corp., сейсмографа—с Колумбийским университетом и Калифорнийским политехническим институтом (18). В дальнейшем планы были изменены и принято решение о запуске нескольких аппаратов Ranger на геоцентрическую орбиту для проверки надежности и работоспособности бортовой аппаратуры и проведения научных исследований. Этот этап должен был стать подготовительным перед целевыми запусками аппаратов к Луне в 1961 г. с помощью ракет-носителей Atlas-Agena В. Предполагалось создание аппаратов весом 320—360 кГ, снабженных панелями с солнечными элементами (площадью 1,8 м2), обеспечивающими мощность 10 вт и химическими батареями весом 54,5 кГ, емкостью 7 квт-ч при 35 час. непрерывной работы. Связная аппаратура включает два передатчика мощностью 0,25 и 3 вт, работающие в диапазоне от 1000 до 2300 Мгц. На аппарате устанавливаются магнитомер, ионизационная камера, анализатор корпускулярного излучения Солнца и детектор излучения La. Предусматривался запуск аналогичных аппаратов Ranger I и Ranger II на геоцентрическую орбиту с большим эксцентриситетом (высота перигея несколько сот километров, апогея—около 1 млн. км). Обращаясь по такой орбите аппарат совершит 1—2 оборота продолжительностью около 2 месяцев каждый. Одна из основных задач запусков—испытания системы ориентации. По программе полета, после сброса носового обтекателя, прикрывающего аппарат на активном участке полета ракеты-носителя, раскрываются панели с солнечными элементами и аппарат беспорядочно кувыркается. После ориентации на Солнце аппарат продолжает вращаться вокруг оси, направленной на Солнце, пока параболическая антенна не будет ориентирована на Землю. Исполнительными органами системы служат реактивные сопла, работающие на сжатом азоте. Работоспособность системы рассчитана на 60—100 суток.
Второй этап нового плана предусматривал доставку аппаратами Ranger III-V на поверхность Лупы приборного контейнера весом 44 кГ. В приборном контейнере из бальзового дерева размещается оборудование весом до 25 кГ, в т. ч. сейсмометр, два акселерометра, источники питания, передатчик с усилителем, направленная антенна, устройство регулирования температуры. Предполагалось использовать уже отработанную систему ориентации, а в системе энергопитания — другие химические батареи, весом 16 кГ, при времени непрерывной работы—10 час. Общая мощность источников электроэнергии должна была равняться 160 вт при суммарном весе 65 кГ. В середине 1961 г. фирма Ford Motor провела испытания приборного контейнера весом 136 кГ в барокамере при температуре до —195° С. Система термостатирования контейнера должна в этих условиях обеспечивать температуру внутри контейнера +24° С. Всего измененным планом предполагалось создание и запуск 5 аппаратов. После запуска аппарата Ranger I было принято решение о создании и запуске дополнительно еще 4 аппаратов (Ranger VI-IX) с установкой вместо приборного контейнера телевизионной системы, разработанной Radio Corporation of America, с целью получения телевизионных изображений лунной поверхности перед падением аппарата, важных для разработки пилотируемого корабля для полета к Луне. Этапы выполнения программы Ranger приводятся ниже.
2. Космический аппарат Ranger I (29, 44)
Основная цель запуска—отработка программы вывода: аппаратов Ranger на геоцентрическую орбиту с большим эксцентриситетом и испытания бортового оборудования. Предполагалось провести также изучение распределения нейтрального водорода в геокороне, частиц низкой энергии в солнечной плазме, космической радиации, рентгеновского излучения Солнца, регистрацию метеорных частиц и излучения La, измерение напряженности земного и межпланетного магнитных полей, определение величины трения между различными металлами в условиях космического вакуума. Запуск аппарата Ranger I был произведен 23 августа 1961 г. с м. Канаверал ракетой-носителем Atlas-Agena В. Полет ракеты-носителя до момента повторного включения двигателя II ступени проходил по программе близкой к расчетной. После выхода II ступени с аппаратом на промежуточную круговую орбиту (160 км) и повторной работы двигателя II ступени программой предусматривалось отделение аппарата пружинным устройством от II ступени, разворот ее на 180°, включение тормозных РДТТ и перевод II ступени на более низкую орбиту, чем орбита аппарата. Вывод II ступени с аппаратом на промежуточную орбиту и торможение ее планировались для отработки техники запуска аппаратов Ranger, предназначенных для достижения Луны. Разворот II ступени осуществляется для того, чтобы оптические датчики системы ориентации аппарата не реагировали на солнечное излучение, отраженное от ступени, Торможение II ступени необходимо для того, чтобы нестерилизованная ступень не упала на Луну. Повторное включение двигателя II ступени осуществить не удалось и аппарат вышел на нерасчетную орбиту с параметрами (в скобках указаны расчетные значения): высота перигея 179 км (60000 км), апогея 446 км (1 102 850 км), наклонение 32,9°, период обращения 90,64 мин (58 сут). По международной системе аппарат Ranger I получил обозначение 1961φ I. 30 августа 1961 г. аппарат вошел в плотные слои атмосферы и сгорел. В целом запуск аппарата Ranger I считается неудачным, т. к. не удалось осуществить повторное включение двигателя II ступени. Проведены испытания бортовых систем и часть из запланированных научных экспериментов. Система ориентации работала нормально и обеспечивала направленность продольной оси аппарата на Солнце, кроме периодов, когда аппарат находился в тени Земли. В связи с выходом аппарата на нерасчетную орбиту некоторые приборы (магнитометр, электростатический анализатор, детектор излучения Lα, сканирующий телескоп не смогли нормально работать (24).
Конструктивно аппарат состоит из каркаса — мачты ферменной конструкции, укрепленной на шестиугольном основании, к которому крепятся 2 панели с солнечными элементами, параболический отражатель и антенна с высоким коэффициентом усиления. Каркас изготовлен из сплава алюминия, основание—из хромоплатинового сплава с применением золота. Служебное оборудование размещено на основании в шести модулях, научная аппаратура—на каркасе. Компоновочная схема аппарата приведена на рис. 6.
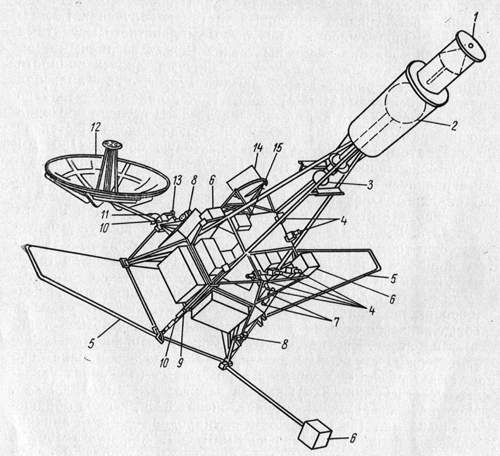
Рис. 6. Компоновочная схема космического аппарата Ranger I.
1—всенаправленная антенна; 2—магнитометр; 3—ионизационная камера; 4—детeктopы
частиц средней энергии; 5—панель с солнечными элементами; 6 — электростатический
анализатор; 7 — телескопы тройных совпадений; 8 — управляющие сопла
по тангажу и крену; 9 — управляющие сопла по рысканью; 10 — датчик направления
на Солнце; 11 — привод антенны; 12 — параболический отражатель направленной
антенны; 13 — датчик направления на Землю; 14 — сканирующий телескоп излучения
Lα; 15 — детектор микрометеорных частиц.
Суммарный вес аппарата — 306 кГ, в т. ч. корпус — 108 кГ, научные приборы — 40 кГ, электронное оборудование — 110 кГ. Диаметр описанной окружности вокруг основания аппарата—1,52 м, высота—4,0 м, максимальный размах при откинутых панелях с солнечными элементами—5,18 м.
Система ориентации включает 6 датчиков направления на Солнце на фотоэлементах из селенида свинца для ориентации аппарата в плоскости тангажа и рыскания, 3 датчика направления на Землю на фотоумножителях для ориентации аппарата в плоскости крена и ориентации направленной антенны и 10 управляющих реактивных сопел, работающих на сжатом азоте. Запас азота 1,1 кГ хранится в сферическом баллоне диаметром 21 см под давлением 210 ата. Система обеспечивает ориентацию аппарата относительно Солнца с точностью ±0,5°, направленной антенны на Землю—с точностью ±2°. Датчики направления на Землю и Солнце и управляющие реактивные сопла размещены в нижней части основания аппарата.
Система энергопитания включает 2 панели общей площадью 1,8 м2 с 8680 солнечными элементами мощностью 150 вт. Вес панелей с солнечными элементами—23 кГ. Основная серебряно-цинковая батарея имеет вес 57 кГ и мощность 9 квт-час. В случае отказа солнечных элементов, научные приборы и служебное оборудование переключаются на питание от батареи, обеспечивающей их работу в течение 2 сут.
Система связи включает 2 передатчика, всенаправленную и направленную антенны. Первый передатчик имеет мощность 0,25 вт, питание обеспечивается серебряно-цинковой батареей, рассчитан на работу в течение 7 суток; телеметрическая информация передается этим передатчиком через направленную антенну. Мощность второго передатчика—3 вт, питание обеспечивается вначале от основной серебряно-цинковой батареи, затем от солнечных элементов; информация передается этим передатчиком через всенаправленную антенну до выхода аппарата на орбиту, а затем — через направленную антенну. Оба передатчика имеют рабочую частоту 960 Мгц. Направленная антенна с параболическим отражателем диаметром 1,2 м с высоким коэффициентом усиления постоянно направлена на Землю. Параболический отражатель и антенна с высоким коэффициентом усиления смонтированы на штанге, укрепленной на основании аппарата, а всенаправленная антенна с низким коэффициентом усиления—в верхней части каркаса. До отделения аппарата от II ступени вся информация передается телеметрической системой, установленной на II ступени.
Система терморегулирования пассивного типа. Тепловой режим обеспечивается окраской отдельных участков конструкции в белый цвет, покрытием золотой пленкой и полировкой алюминиевого каркаса.
Временное устройство обеспечивает включение научных приборов, передатчиков и другого оборудования и начинает работать за 3 мин до старта. Устройство рассчитано на выдачу в течение всего полета 10 различных команд, причем каждая команда подается по отдельному каналу с отдельным релейным устройством.
Сканирующий телескоп излучения La предназначен для сканирования поверхности Земли в диапазоне длин волн: 1050—1350 А и изучения нейтрального водорода в геокороне на длине 1216 А. С помощью этой аппаратуры предполагалось получить изображение Земли в ультрафиолетовых лучах. Аппаратура включает параболический отражатель с ионизационной камерой в его фокусе, помещенный в цилиндр без верхнего днища, который является защитой от радиации. Аппаратура смонтирована в карданной системе, позволяющей телескопу осуществлять сканирование в двух взаимно-перпендикулярных плоскостях; повороты осуществляются моторами. Аппаратура установлена на основании аппарата, угол зрения телескопа—0,5°. Общий вес аппаратуры—6,8 кГ, энергопотребление—1,4 вт. Оборудование разработано Научно-исследовательской лабораторией ВМС и Лабораторией реактивного движения.
Магнитометр предназначен для измерения напряженности и определения направленности магнитного поля, а также его временных и пространственных вариаций. Магнитометр на парах рубидия-87 помещен в центре сферы диаметром 33 см, изготовленной из фибергласса и установленной на мачте, укрепленной на основании аппарата. Сфера размещена в цилиндре, укрепленном в верхней части форменной конструкции каркаса (под антенной с низким коэффициентом усиления). Подобный магнитометр был установлен на спутнике Explorer Х (см. гл. II).
Электростатический анализатор (детектор корпускулярного излучения Солнца) предназначен для измерения энергии протонов и электронов низкой энергии в солнечной плазме (в функции знака заряда и энергии на единицу заряда) и определения направления их движения. На аппарате установлено 6 анализаторов по шести перпендикулярным направлениям, часть из них—на основании аппарата, а часть вынесена на штанге, укрепленной к основанию аппарата. Анализаторами предполагалась регистрация электронов с энергией E=13,7—110 эв и протонов с энергией E=13,7-5490 эв; они рассчитаны на регистрацию потока частиц в диапазоне 8,6 x 104-8,6х1011 см-2 сек-1. Каждый анализатор имеет угол обзора 15°. Суммарный вес анализаторов —15 кГ, энергопотребление —2,74 вт. Анализаторы разработаны Лабораторией реактивного движения.
Детекторы частиц средней энергии предназначены для регистрации протонов и электронов в солнечной плазме и измерения вызываемой ими радиации в диапазоне энергий от нескольких сотен эв до нескольких кэв. На аппарате установлено 6 различных детекторов, расположенных в средней части каркаса. Общий вес детекторов—1,7 кГ, энергопотребление—0,16 вт. Детекторы (4 шт.) на кристалле CdS, один из которых имеет отклоняющий магнит, собраны в пары и отклонены на 45° от направления на Солнце; детектором с отклоняющим магнитом регистрируются протоны с энергией E ≥ 400 эв и электроны с энергией E ≥ 500 кэв, угловое разрешение 10-2 стерад, три других детектора регистрируют протоны с энергией E ≥ 100 эв и электроны с энергией E ≥ 35 кэв, угловое разрешение одного из них 10-3-5 X 10-2 стерад, двух других—102 стерад. Счетчик Гейгера-Мюллера типа Апton 213 с открытым нижним концом предназначен для регистрации протонов с энергией E ≤ 0,5 Мэв и электронов с энергией E ≤ 35 кэв; эти детекторы разработаны Университетом штата Айова.
6-й детектор с поверхностным запорным слоем из золота, легированного кремнием, состоит из двух тонких кремниевых дисков, покрытых золотом и расположенных один за другим. Протоны с энергией 0,5 Мэв < Е < 5 Мэв доходят до верхнего диска и вызывают поток ионов, достаточный для их регистрации, протоны с 5 Мэв < Е < 10 Мэв проходят верхний диск и регистрируются вторым диском, протоны с Е > 10 Мэв проходят через оба диска и не регистрируются; это значение и является верхним пределом энергии частиц, регистрируемых детектором, электроны этим детектором не регистрируются. Детектор разработан Университетом г. Чикаго.
Телескопы тройных совпадений (2 шт.) расположены в нижней части каркаса; аналогичные телескопы были установлены на аппарате Pioneer VI, запущенном 25 сентября 1960 г. (см. гл. I, раздел 8). Ионизационная камера предназначена для изучения первичной радиации и радиации в космическом пространстве вне атмосферы Земли; аналогичная камера была также установлена на аппарате Pioneer VI.
Детектор микрометеоритных частиц предназначен для измерения потоков микрометеоров в функции энергии, импульса и направления движения этих частиц. Детектор состоит из двух частей — чувствительного элемента, при ударе частиц дающего световую «вспышку», и кристаллического элемента. «Вспыхивающий» элемент измеряет кинетическую энергию частиц, а кристаллический — импульс, массу, скорость и энергию частиц. «Вспыхивающий» элемент имеет порог регистрации энергии, равный 10-2 эрг, и обеспечивает регистрацию в минуту 3 ударов высокой энергии, 7 ударов средней энергии или 31 удара с энергией сверх порога. Кристаллический элемент имеет порог регистрации 10 -4 Г см/сек. Вес детектора— 1,6 кГ, потребляемая энергия—0,2 вт. Детектор установлен в средней части каркаса, разработан Центром космических полетов им. Годдарда.
Сцинтилляционные счетчики рентгеновского излучения Солнца (2 шт.) предназначены для регистрации малых вариаций рентгеновских лучей низкой энергии солнечного происхождения при солнечных вспышках. Каждый прибор состоит из двух сцинтилляционных детекторов, чувствительная поверхность которых направлена на Солнце; 6 светонепроницаемых окон на фасаде каждого детектора обеспечивают защиту от микрометеорных частиц, а рентгеновские лучи проходят через них. Счетчики рассчитаны на регистрацию рентгеновских лучей с энергией E=1—20 кэв, их угловое разрешение—2 π , вес счетчиков — 5,5 кГ, энергопотребление — 2 вт. Счетчики разработаны Лос-Аламосской научной лабораторией совместно с Sandia Corp.
Динамометры предназначены для измерения трения между различными металлами в условиях космического вакуума. Образцы металлов, имеющие форму дисков, смонтированы на валу, приводимом в движение электромотором; при его вращении они трутся о неподвижные образцы полусферической формы. Всего должно было испытываться 80 различных комбинаций металлов.
Стерилизация аппарата не предусматривалась. Слежение за аппаратом осуществлялось станциями системы DSIF (Deep Space Instrumentation Facility—приборное оборудование для дальнего космоса) в Голдстоуне, Крюгерсдорпе и Айленд-Лагун, а на первом участке полета также мобильной станцией, расположенной рядом со станцией в Крюгерсдорпе. Мобильная станция имеет более широкий луч направленности (10° вместо 1°) и большую скорость сканирования (10 град/сек вместо 1 град/сек), чем станции системы DSIF. Станции системы имели в тот период антенны с отражателем диаметром 26 м, а мобильная станция—3 м. О системе DSIF см. гл. IV, раздел 2. Головная организация по разработке аппарата и программы исследований—Лаборатория реактивного движения.
3. Космический аппарат Ranger II
Цель запуска и назначение аппарата—как у аппарата Ranger I. Запуск аппарата произведен 18 ноября 1961 г. с м. Канаверал ракетой-носителем Atlas-Agena В. Полет ракеты-носителя до момента повторного включения двигателя II ступени проходил то программе, близкой к расчетной (программа полета аппарата аналогична программе для аппарата Ranger I). Неисправность системы стабилизации привела к вращению II ступени, что препятствовало поступлению топлива в двигатель II ступени и повторно включить его не удалось. Аппарат вышел на нерасчетную орбиту с параметрами (в скобках указаны расчетные значения): высота перигея 150 км (60 000 км), апогея 242 км (1 102 850 км), наклонение-33°,34, период обращения 88,28 мин (58 сут). По международной системе аппарат Ranger II получил обозначение 1961αθ. 20 ноября, совершив несколько оборотов, аппарат вошел в плотные слои атмосферы и разрушился (31).
Конструкция, состав служебного оборудования и научной аппаратуры аппарата—как у аппарата Ranger I. Отличием комплекта научной аппаратуры является установка в составе детектора частиц средней энергии дополнительного счетчика Гейгера—Мюллера для изучения радиации в области энергии от нескольких кэв до нескольких Мэв. Детектором служит счетчик Гейгера—Мюллера типа Anton 112 в виде тонкостенного цилиндра из титана с защитой 30 мг/см2; им регистрируются протоны с энергией Е ≥ 3 Мэв и электроны с энергией Е ≥ 200 Мэв в конусе с углом около 10°. Энергопотребление детектора—0,16 вт. Разработчик детектора—Университет шт. Айова. Суммарный вес аппарата — 306 кГ. Аппарат стерилизацию не проходил.
4. Космический аппарат Ranger III (3, 10, 12, 34, 36, 49, 55)
Аппарат предназначен для получения телевизионных изображений лунной поверхности при подлете к Луне, регистрации сейсмических колебаний поверхности Луны и γ -излучения на траектории полета, определения концентрации радиоактивных элементов в лунных породах по γ -излучению, изучения характеристик поверхности Луны и характера отражения сигналов радиолокационного альтиметра от поверхности Луны. Приборный контейнер предполагалось доставить в район Океана Бурь и проводить исследования в течение 30 суток. Как показали расчеты, вероятность успешной доставки приборного контейнера на Луну с помощью аппаратов Ranger составляет 40—60%.
Запуск аппарата Ranger III (рис. 7) произведен 26 января 1962 г. с м. Канаверал ракетой-носителем Atlas-Agena В. Полет ракеты-носителя до момента окончания повторного периода работы двигателя II ступени проходил по программе близкой к расчетной. Двигатель II ступени при повторном включении работал больше расчетного времени и в конце активного участка аппарату была сообщена скорость 11,1 км/сек, превышающая расчетную на 0,2 км/сек, что не могло быть скомпенсировано корректирующей двигательной установкой. По сигналу станции слежения системы DSIF в Голдстоуне при приближении аппарата к Луне телевизионная камера была направлена на Луну и включена.
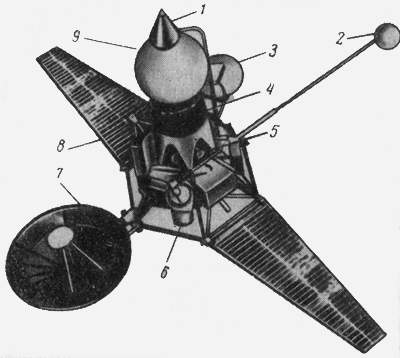
Рис. 7. Космический аппарат Ranger III
1 — всенаправленная антенна; 2 — контейнер с
γ-спектрометром; 3 — параболический отражатель
радиолокационного альтиметра; 4 — тормозной двигатель;
5 — корректирующая двигательная установка; 6 — телевизионная
камера; 7 — параболический отражатель
направленной антенны; 8 — панель с солнечными элементами;
9 — приборный контейнер.
Недостаточно точная ориентация направленной антенны вызвала значительное ослабление сигналов и прием их на станции слежения в Голдстоуне стал невозможен; вследствие этого изображений Луны получить не удалось. Прекращение работы системы ориентации, вызванное полной разрядкой химической батареи, привело к потере ориентации аппарата. 28 января аппарат прошел на расстоянии 3 678 км от Луны (36 670-х). Из-за большого расстояния до Луны капсула с приборным контейнером не отделилась. 2 февраля на расстоянии около 804 500 км от Земли прием сигналов от аппарата прекратился. После пролета Луны аппарат вышел на гелиоцентрическую орбиту с параметрами: перигельное расстояние 147,3 млн. км (0,9839 а. е.) афелийное расстояние 173,5 млн. км (1,163 а. е.), наклонение к плоскости эклиптики 0,4°, период обращения 406,44 сут. Время существования аппарата—неограниченное. По международной системе аппарат Ranger III получил обозначение 1962 α I.
Ниже приводится расчетная программа полета аппарата. Т—момент старта; Т+1500 сек.—отделение аппарата от II ступени, включение программного и телеметрического оборудования (до отделения аппарата используется телеметрическое оборудование на II ступени), разворот II ступени на 180°; Т+1800 сек. — откидывание направленной антенны и панелей с солнечными элементами; Т+1980 сек.—включение системы ориентации; Т+3,5 час.—ориентация направленной антенны на Землю; Т+4 час.-включение γ —спектрометра; Т+16 час—подача с Земли команды на включение корректирующей двигательной установки. Перед включением направленная антенна прижимается к корпусу аппарата во избежание повреждения ее истекающими газами, бортовая аппаратура переключается на всенаправленную антенну, после окончания коррекции аппарат ориентируется относительно Солнца, Т+18,5 час—переключение аппаратуры на направленную антенну, выдвижение телескопической консоли с γ-спектрометром пневматическим устройством. Начиная с этого момента телеметрические сигналы от γ-спектрометра передаются каждые 8 минут. Тк—момент падения незаторможенного аппарата (без приборного контейнера) на Луну; Тк—65 мин (расстояние до Луны—7300 км)—ориентация аппарата т. о., чтобы телекамера была направлена на Луну. После ориентации солнечные элементы не освещены Солнцем и бортовая аппаратура переключается на питание от химической батареи. Всенаправленная антенна отводится в сторону, откидывается кронштейн с радиолокационным альтиметром; Тк—40 мин. (расстояние до Луны—3840 км) —начало работы телекамеры, которая автоматическим устройством включается каждые 13 сек. и передает изображения каждые 10 сек. Периоды (3 сек.), когда камера выключена, используются для передачи сигналов от радиолокационного альтиметра и γ-спектрометра (сигналы от γ-спектрометра с этого момента передаются каждые 52 сек.); Тк—8,1 сек. (расстояние до Луны— 21 340 м)—начало работы автоматической системы, обеспечивающей отделение от аппарата капсулы с приборным контейнером и тормозным двигателем. Отделение капсулы с контейнером и тормозным двигателем происходит после срабатывания разрывных болтов. Отделившийся контейнер стабилизируется вращением со скоростью 300 об/мин тремя реактивными соплами. Затем включается тормозной двигатель, который, снизив скорость падения контейнера до 0 (на расстоянии 330 м от поверхности Луны), отделяется. Расчетная скорость падения контейнера не более 70 м/сек (4).
Конструктивно аппарат имеет много общего с аппаратом Ranger I, но с постановкой новых задач в его конструкцию внесены изменения. Вместо каркаса форменной конструкция на основании аппарата установлена капсула с приборным контейнером с научной аппаратурой и служебным и вспомогательным оборудованием, обеспечивающим отделение капсулы от аппарата и прилунение контейнера. В верхней части контейнера установлена всенаправленная антенна, на боковой поверхности основания смонтирована телевизионная камера. Суммарный вес аппарата—330 кГ, в т. ч. каркаса—36 кГ. Диаметр описанной окружности вокруг основания аппарата—1,52 м, высота—3,12 м, максимальный размах при откинутых панелях с солнечными элементами—5,18 м.
Система энергопитания включает 2 панели общей площадью 1,8 м2 с 8680 солнечными элементами мощностью 150 вт, вес панелей—19 кГ. Серебряно-цинковая батарея мощностью около 1000 вт-ч весит 11 кГ. Серебряно-кадмиевые батареи (6 шт.) расположены в приборном контейнере.
Радиолокационный альтиметр предназначен для выдачи команд на отделение капсулы от аппарата и включение тормозного двигателя; по характеру отражения радиолокационных импульсов предполагалось провести изучение характеристик лунной поверхности. Альтиметр с антенной, параболическим отражателем и химическими батареями, обеспечивающими его питание, установлен на откидывающемся кронштейне в нижней части капсулы. Приемником сигналов служил гетеродин, излучателем — клистрон. Длительность импульсов — 2 μ сек., частота повторения — 500—600 имп/сек, на выходе из магнетрона передатчика импульс имеет мощность от 150 до 400 вт. Частота излучения—9400 Мгц, ширина полосы частот приемника—12—16 Мгц, диапазон шумов приемника—11—12 дб. Ширина диаграммы направленности антенны альтиметра—12°. Вес альтиметра—2,95 кГ, антенны с отражателем—5 кГ. Команды на отделение капсулы и включение тормозного двигателя подаются на высотах от 19 до 25 км от поверхности Луны. Измерения альтиметром производятся до момента контакта капсулы с лунной поверхностью. Площадь лунной поверхности, облучаемая альтиметром, равна 153 км2. Альтиметр разработан Лабораторией реактивного движения.
Телевизионная камера предназначена для получения изображений лунной поверхности района прилунения капсулы в период ее спуска. Оптика камеры изготовлена из плавленного кварца и представляет собой астрономический телескоп системы Кассегрена с первичным вогнутым параболическим зеркалом и вторичным выпуклым гиперболическим зеркалом. В камере применено электростатическое отклоняющее устройство и фокусированный видикон, со специальной мишенью с поверхностью из сурмянистой серы со скоростной стирающей способностью. В таблице 2 приведены характеристики телевизионной системы.
Камера разработана Университетом шт. Аризона, Управлением по геологическим исследованиям США, Университетом шт. Калифорния и Лабораторией реактивного движения.
Система ориентации аналогична системе, установленной на аппарате Ranger I.
Таблица 2
| Характеристики | Величина |
| системы | высота съемки, км | 3000-0,5 |
| обозреваемая площадь, км2 | от 600 Х 600 до
0,035 Х 0,035 |
максимальная линейная разрешающая
способность на местности, м | до 0,4 |
| количество линий разложения изображения | 200 |
| расчетное число кадров | 100 |
| периодичность передачи кадров, сек | 13 |
| длительность кадра, сек | 10 |
| потребляемая мощность, вт | 19 |
| вес камеры, кг | 7,7 |
| Объектива | фокусное расстояние, мм | 102 |
| светосила | 6 |
| угол зрения, град | 1 |
| время экспозиции кадра, мсек | 20 |
передающей
трубки | тип передающей трубки | Видикон с электроста-
тическим управлением |
| диаметр видикона, мм | 25 |
| область спектральной чувствительности | Диапазон видимого света |
динамический диапазон освещенности
фотокатода, лк | 0,107-10,7
(100:1) |
| размер растра, мм2 | 16 |
| разрешающая способность:—линейная, лин/мм | 6 |
| —угловая, угл. сек. | 5 |
Корректирующая двигательная установка использует ЖРД, работающий на однокомпонентном топливе — гидразине. Тяга двигательной установки — 22,7 кГ, вес (с топливом) — 16,4 кГ. Двигатель может работать отдельными импульсами, длительность которых регулируется по командам с Земли и обеспечивается акселерометром. Минимальная продолжительность импульса 50 мсек, что обеспечивает приращение скорости на 0,03 м/сек, максимальная (до полной выработки топлива)—68 сек, с приращением скорости 44 м/сек. Органами управления вектором тяги служат газовые рули. Топливо хранится в резиновом бачке, помещенном в герметичный контейнер. Система подачи топлива — вытеснительная; рабочим телом служит гелий, хранящийся в баллоне под давлением 210 кГ/см2. Для инициирования реакции разложения в камеру сгорания двигателя из специальных капсул вводится четырехокись азота, образующая с гидразином самовоспламеняющуюся смесь, а для поддержания реакции в камеру помещен катализатор—окись алюминия.
Система связи включает направленную антенну с высоким коэффициентом усиления, с параболическим отражателем диаметром 1,2 м, смонтированную на штанге, прикрепленной к основанию аппарата. Всенаправленная антенна с низким коэффициентом усиления смонтирована в верхней части приборного контейнера. Передатчики (2 шт.) с выходной мощностью 0,50 вт и 3 вт имеют рабочую частоту 960 Мгц. Передатчик мощностью 3 вт установлен на аппарате, передатчик мощностью 0,5 вт—в приборном контейнере. В полете информация от γ-спектрометра, радиолокационного альтиметра, телевизионной камеры и телеметрические данные о работе служебного оборудования передаются передатчиком, установленным на аппарате, с частотной модуляцией поднесущих и несущих частот направленной и всенаправленной антеннами. Энергопитание передатчика обеспечивается серебряно-цинковыми батареями и солнечными элементами. Информация от сейсмометра передается передатчиком, установленным в приборном контейнере, с частотной модуляцией поднесущих и фазовой модуляцией несущей частоты через всенаправленную антенну. Энергопитание передатчика обеспечивается серебряно-кадмиевыми батареями. Электронное оборудование включает цифровое счетно-решающее программное устройство на транзисторах и гироплатформу. Вес антенн с электронным оборудованием — 49 кГ.
Сопла стабилизации (4) предназначены для стабилизации относительно продольной оси капсулы с приборным контейнером, отделяемой от аппарата. Стабилизация, осуществляется вращением вокруг продольной оси со скоростью 300 об/мин 3 реактивными соплами, работающими на пороховых газах. Тяга сопел—9 кГ, их вес—1,0 кГ. Камеры сгорания сопел размещены в сопле тормозного двигателя и при его включении реактивной струёй сопла отбрасываются. Твердотопливный тормозной двигатель предназначен для снижения скорости падения приборного контейнера примерно на 2,8 км/сек, обеспечивая на расстоянии около 330 м от поверхности Луны нулевую скорость. По достижении этой скорости двигатель отделяется от приборного контейнера. Расчетная продолжительность работы двигателя—10 сек. Топливо—смесевое. Двигатель изготовлен из стеклопластика «спиралой» методом намотки, стенки камеры сгорания имеют термоизоляцию из фенольной пластмассы, армированной нейлоном. Тормозной двигатель находится в отбрасываемом посеребренном кожухе из пластика (сбрасывается часть кожуха, прикрывающая сопло двигателя). Вес двигателя 98 кГ, длина — 80 см, диаметр — 46 см. Двигатель разработан Hercules Powder. Тормозной двигатель с соплами стабилизации показан на рис. 8.
Лунная капсула и приборный контейнер (4). Приборный контейнер разработан Aeronautics (отделение Ford Motor). Схема лунной капсулы представлена на рис. 9. Контейнер сферической формы диаметром 30,5 см помещен в амортизирующую радиопрозрачную оболочку из бальзового дерева диаметром 63,5 см, пространство между контейнером и оболочкой заполнено маслом. Плавающий в масле контейнер примерно через 20 мин после удара о поверхность Луны устанавливается неподвижно внутри оболочки антенной вверх (центр тяжести контейнера лежит на 1,2 см ниже геометрического центра шара). Для того, чтобы масло не демпфировало толчков, регистрируемых сейсмометром, пиропатронами выбиваются из оболочки 2 заглушки и масло вытекает.
Для поддержания внутри контейнера определенной температуры, независимо от суточных изменений температуры на поверхности Луны, в нем находится запас дистиллированной воды весом 1,7 кГ. Кипение воды в лунных условиях при температуре 24° С должно предотвратить чрезмерное повышение температуры в контейнере; остывая, вода будет отдавать тепло, что не допустит чрезмерного понижения температуры. По изменению температуры в контейнере предполагалось определить температуру поверхности Луны. В контейнере размещены сейсмометр, 6 серебряно-кадмиевых батарей, передатчик и антенна. Контейнер крепится к тормозному двигателю на 12 цилиндрических демпферах. Проведение научных измерений и передачу информации предполагалось проводить в течение 30 суток. Вес приборного контейнера — 46,5 кГ, в т. ч. антенна и приборное оборудование—25,7 кГ, оболочка контейнера — 18 кГ.
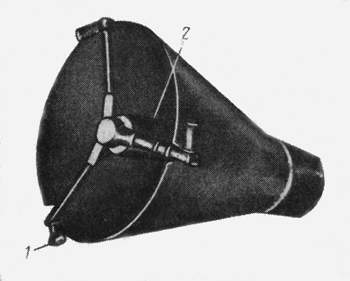
Рис 8. Тормозной двигатель с соплами стабилизации,
1 — одно из трех сопел; 2 — камера сгорания.
Магнитный сейсмометр предназначен для регистрации сейсмических колебаний лунной поверхности, получения информации о природе ядра Луны, определения глубины «лунотрясений» и приблизительной оценки энергии этих явлений, получения данных о механических характеристиках лунного грунта. Сейсмометр состоит из кадушки, подвешенного на пружине магнита и калибровочного устройства. Колебательная масса состоит из постоянного магнита, подвешенного к корпусу на спиральной пружине, и двух пружинных консольных колец. Пружинные кольца поддерживают концентричность колебательной массы внутри корпуса и позволяют определять любое наклонение продольных осей в пределах от 0 до 90°. При ударе контейнера о поверхность Луны сейсмометр занимает вертикальное положение. Энергопотребление сейсмометра—48 мвт при напряжении 6 в. Вес сейсмометра, заполненного демпфирующей жидкостью, 3,63 кГ, без жидкости—3,30 кГ, вес колебательной массы—1,7 кГ. Сейсмометр представляет собой цилиндр диаметром 121 мм и высотой 133 мм, он разработан Сейсмической лабораторией Калифорнийского технологического института и Колумбийским Университетом.
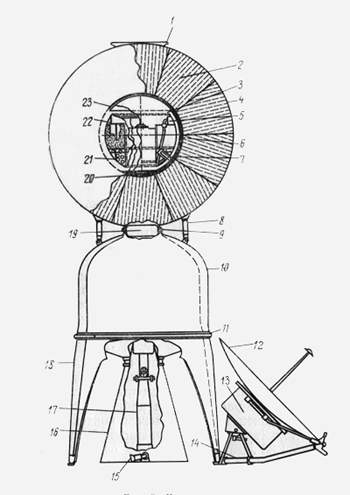
Рис. 9 Лунная капсула.
1 — фланец крепления всенаправленной антенны;
2 — секция амортизирующей оболочки из бальзового
дерева; 3 — теплоизоляция; 4 — амортизирующая оболочка
из бальзового дерева; 5 — температурные датчики;
6 — приборное оборудование, защищенное пластмассовым
кожухом; 7 — выбивающий механизм; 8 — демпфер
(1 из 12); 9 — фиксатор отделяемого тормозного двигателя;
10 — кожух тормозного двигателя; 11 — сбрасываемое
опорное устройство тормозного двигателя; 12 —
параболический отражатель антенны радиолокационного
альтиметра; 13 — радиолокационный альтиметр с
химическими батареями; 14 — опора радиолокационного
альтиметра; 15 — сопло стабилизации (1 из 3); 16 — сопло
тормозного двигателя; 17— камера сгорания сопел
стабилизации; 18 — сбрасываемая часть кожуха тормозного
двигателя; 19 — механизм разделения; 20 — ребро,
воспринимающее ударную нагрузку; 21 — нижняя камера с
водой; 22 — верхняя камера с водой; 23 — антенный блок.
γ-спектрометр предназначен для получения информации о природе и составе лунной поверхности и сравнение спектров γ-лучей лунных пород и γ-лучей не лунного происхождения с целью определить концентрацию радиоактивных пород, слагающих поверхность Луны. Спектрометр состоит из детектора, высоковольтного источника тока и высокоимпульсного анализатора. В детекторе применены 2 сцинтиллятора—поливиниловый пластиковый с толщиной стенок около 3,1 мм и с кристаллом Csl, помещенный внутрь пластикового. Пластиковым сцинтиллятором разделяются γ-лучи и заряженные частицы; сигналы от сцинтилляторов передаются на фотоэлемент. γ-спектрометром регистрируются γ-кванты с энергией в диапазоне 0-0,6 Мэв и 0-3 Мэв при точности измерения 12%. Детектор имеет всенаправленное действие. Энергопотребление спектрометра — менее 2 вт, вес— 5,5 кГ, высота — 25 см, объем—13,1 дм3. Измерения предполагалось начать через 4 часа после старта ракеты-носителя и проводить до момента достижения аппаратом высоты 25 км над лунной поверхностью, прибор рассчитан на работу в течение 65 час. Спектрометр размещен в алюминиевом контейнере сферической формы, смонтированном на раздвижной телескопической антенне длиной 1,83 м, прикрепленной к основанию аппарата. Спектрометр разработан Лабораторией реактивного движения, Калифорнийским университетом и Лос-Аламосской научной лабораторией.
Аппарат Ranger III проходил термическую и предстартовую стерилизацию. Термическая стерилизация проводилась в течение 24 час при температуре 125° С. Наземная мобильная установка для предстартовой стерилизации спроектирована и изготовлена по контракту Лаборатории реактивного движения Lockheed Aircraft Corp., стерилизация проводилась в течение нескольких часов газообразной смесью окиси этилена и фреона-12, которая подавалась в носовой отсек ракеты-носителя, находящейся на пусковой установке.
Основные организации—разработчики аппарата Ranger III те же, что и аппарата Ranger I, а также Aeronautics Div. Стоимость контрактов по разработке и изготовлению аппарата 13 млн. долл.
5. Космический аппарат Ranger IV (6, 35, 37)
Назначение аппарата такое же, как у аппарата Ranger III. Запуск аппарата произведен 23 апреля 1962 г. со стартового комплекса № 13 м. Канаверал ракетой-носителем Atlas—Agenа В. Полет ракеты-носителя проходил по программе, близкой к расчетной. Вскоре после запуска вышла из строя бортовая радиоаппаратура, за исключением небольшого радиопередатчика, и аппарат не смог отрабатывать подаваемые с Земли команды. Получение телевизионных изображений поверхности Луны и отделение приборного контейнера осуществить не удалось. По международной системе аппарат Ranger IV получил обозначение 1962 μI. 26 апреля аппарат упал на невидимую сторону Луны в точке с селенографическими координатами 130° 42' з. д. и 15° 30' ю. ш. (расчетное значение). Продолжительность полета аппарата—63 час. 57 мин. Конструкция, состав служебного оборудования, и научных приборов аппарата—как у аппарата Ranger III. Суммарный вес аппарата—331,1 кГ. Аппарат проходил термическую и предстартовую стерилизацию.
6. Космический аппарат Ranger V (22)
Назначение аппарата такое же, как у аппарата Ranger III. Запуск аппарата произведен 18 октября 1962 г. с м. Канаверал ракетой-носителем Atlas—Agena В. Полет ракеты-носителя проходил почти в полном соответствии с программой. По международной системе аппарат получил обозначение 1962 βη. В полете отказали солнечные элементы и питание оборудования было переключено на химическую батарею. Через 4 часа после полной разрядки химической батареи функционирование оборудования прекратилось. До разрядки химической батареи получены данные о γ-лучах. 20 октября 1962 г. аппарат прошел мимо Луны на расстоянии около 725 км и вышел на гелиоцентрическую орбиту с перигельным расстоянием 142,1 млн. км, афельным расстоянием 159,8 млн. км, наклонением к плоскости эклиптики 0,44°, периодом обращения 370,22 сут. Время существования аппарата — неограниченное.
Конструкция, состав бортового оборудования и научных приборов аппарата—как у аппарата Ranger III. Суммарный-вес аппарата—343 кГ. Аппарат проходил термическую и предстартовую стерилизацию. Возможные причины, приведшие к отказу солнечных элементов: воздействие искусственного пояса радиации, возникшего в результате высотного-ядерного взрыва, проведенного США 9 июля 1962 г. (тротиловый эквивалент заряда—1,4 Мгт, высота взрыва 1000 км, увеличение показаний счетчика радиации в 100 раз); отказ системы ориентации панелей с солнечными элементами; механические повреждения солнечных элементов. По заявлению NASA выход из строя оборудования аппаратов Ranger III—V объясняется тем, что при термической стерилизации аппаратов оборудование было повреждено. На это указывают следующие факторы (27): оборудование нестерилизованных аппаратов Ranger I, II работало исправно; оборудование нестерилизованного аппарата Mariner II (изучение Венеры), аналогичное оборудованию аппаратов Ranger, также в основном работало исправно; при наземных испытаниях стерилизованных аппаратов Ranger зарегистрировано 9 отказов оборудования, нестерилизованных — 3. В связи с этим NASA приняло решение добиться отмены требования стерилизации аппаратов, запускаемых на Луну. Дальнейшие запуски аппаратов Ranger решено было прекратить до выяснения экспертной комиссией причин неудачного запуска аппарата Ranger V и выяснения, нет ли в конструкции аппаратов Ranger принципиальных пороков. Анализ показал, что таких пороков нет, но некоторые элементы нуждаются в усовершенствовании, в основном, с целью повышения надежности. На основании этих выводов, NASA приняло решение модифицировать некоторые элементы конструкции аппарата, а затем подвергнуть его всесторонним испытаниям на надежность. Общие затраты на разработку, изготовление и запуски аппаратов Ranger I—V к середине 1963 г. составили более 200 млн. долл., на создание и запуск аппарата Ranger V— 15 млн. долл. (32)
7. Космический аппарат Ranger VI (Ranger A)
(условное обозначение аппарата Р—53)
Назначение аппарата (рис. 10) — получение телевизионных изображений поверхности Луны перед падением на нее. Запуск аппарата произведен 30 января 1964 г. со стартового комплекса № 13 м. Кеннеди ракетой-носителем Atlas—Agenа В. Полет ракеты-носителя и аппарата проходил по программе, близкой к расчетной. После выхода на траекторию полета к Луне аппарат Ranger А получил название Ranger VI, а по международной системе обозначение 1964—07А. Через 15 час. после старта была включена на 66 сек. двигательная установка для коррекции траектории (без коррекции аппарат прошел бы на расстоянии 960 км от Луны), что обеспечило приращение скорости на 41 м/сек. Перед заключением двигательной установки аппарат по команде с 3емли был ориентирован поворотами по крену на 12° и тангажу на 71°. За 15 мин. до падения аппарата на Луну со станции слежения системы DSIF в Голдстоуне была подана команда на включение телевизионных камер для их прогрева. Полученный на Земле телеметрический сигнал показал, что команда была принята, однако никаких телевизионных изображений с аппарата не поступило. 2 февраля аппарат упал на Луну к востоку от Моря Спокойствия в 23° от терминатора в точке с селенографическими координатами 9°24 с. ш. и 21°30 в. д. менее чем в 30 км от расчетной точки (8,5° с. ш. и 21,0° в. д.). Наблюдение за падением аппарата вели 32 обсерватории, однако ни одной из них не удалось зарегистрировать ожидаемого пылевого облака. Полет аппарата продолжался 63 час. 35 мин. (1,21,23).
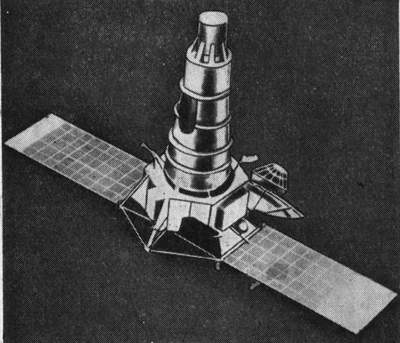
Рис. 10. Космический аппарат Ranger VI.
Серия аппаратов Ranger VI-IX относится к модели Block III и составляет третий этап программы (8). По конструкции и составу бортового оборудования аппараты этой серии и Ranger III—V имеют много общего. Основное отличие: на аппаратах Ranger VI—IX вместо капсулы и приборного контейнера с тормозным двигателем установлены 2 комплекта телевизионных камер с автономными источниками питания, временными и программными устройствами. Кроме того, корпуса аппаратов Ranger VI—IX изготовлены из магниевого сплава; бортовые устройства аппаратов, управляющие работой связного оборудования, как правило, дублированы или предусмотрена возможность управления работой связного оборудования по командам с Земли; установлены более совершенная корректирующая двигательная установка, дублирующий комплект управляющих реактивных сопел с баллоном сжатого азота и вторая химическая батарея емкостью 1200 вт-час; изменена форма панелей с солнечными элементами, что позволило без увеличения веса разместить большее число солнечных элементов и увеличить мощность со 150 до 175 вт.
Оборудование размещено в шести модулях по периметру аппарата: модуль I—центральное счетно-решающее и программное устройства, командная система; модуль II — передатчик и приемник; модуль III—кодирующее устройство; модуль IV—элементы системы стабилизации и ориентации; модуль V—серебряно-цинковая батарея; модуль VI— аппаратура системы электропитания.
Аппараты Ranger VI-IX не проходили стерилизацию. Суммарный вес аппарата—364,7 кГ, в т. ч. конструкции— 41,4 кГ. Диаметр окружности, описанной вокруг основания аппарата—1,52 м, высота при сложенной антенне—2,51 м, при развернутой антенне—3,12 м, максимальный размах при откинутых панелях с солнечными элементами—5,18 м.
Корректирующая двигательная установка (50) аналогична ранее применявшейся на аппаратах Ranger III—V, но увеличены минимальное и максимальное приращение скорости (с 0,03 м/сек до 0,1 м/сек и с 44 м/сек до 58 м/сек), увеличена максимальная продолжительность работы с 68 сек. до 98,5 сек. Эти изменения дают возможность проведения коррекции при отклонении от расчетной траектории до 9600 км. Длительность импульса обеспечивается временным устройством, а на аппаратах Ranger III-V она обеспечивалась акселерометром. Вес установки—20,6 кГ.
Система ориентации (16,33) включает 6 датчиков направления на Солнце на фотоэлементах из селенида свинца, обеспечивающих ориентацию аппарата в плоскости тангажа и рысканья. Датчики (3 шт.) направления на Землю обеспечивают ориентацию аппарата в плоскости крена и ориентацию направленной антенны. Угол обзора датчиков направления на Землю на аппарате Ranger VI меньше, чем на предыдущих аппаратах. Это позволяет уменьшить вероятность захвата Солнца вместо Земли, запускать аппарат при менее благоприятном расположении Солнца, Земли и Луны. Ранее благоприятный период для запуска составлял 4 суток, после установки новых датчиков — 7—8 суток в месяц. В систему входят 3 гироскопа и 2 комплекта по 6 управляющих реактивных сопел, работающих на сжатом азоте. Каждый комплект сопел имеет свой баллон со сжатым азотом. Вес системы ориентации и автопилота—26,8 кГ. Разработчик аппаратуры системы — Nortronics.
Система связи (50) для передачи телевизионных изображений использует 2 передатчика мощностью по 60 вт, c частотой 959,52 Мгц и 960,05 Мгц для камер типа F и Р, соответственно. Полоса передачи—200 кгц, вид модуляции— ЧМ. Для приема команд и передачи телеметрической информации применен 8-канальный приемоответчик мощностью 3 вт и частотой 960,58 Мгц. Скорость передачи данных — 3500 бит/сек, метод модуляции — АИМ — ФМ. Установлены направленная антенна с высоким коэффициентом усиления (18 дб) (разработчик Barry Controls) и всенаправленная антенна с низким коэффициентом усиления. Вес связного оборудования — 17,6 кГ, кодирующего устройства — 9,2 кГ, счетно-решающего и программного устройств — 4,3 кГ. Телеметрическая информация поступает от датчиков, измеряющих 200 различных параметров, в том числе характеризующие состояние и работу телевизионного оборудования (15 параметров до включения и 105 во время работы камер).
Система энергопитания (50) включает 2 панели общей площадью 2,267 м2 с 9 792 солнечными элементами, обеспечивающими мощность 240 вт, и 2 серебряно-цинковые батареи емкостью по 1200 вт-час, рассчитанные на 9 часов работы и обеспечивающие напряжение 26,5 в. Батареи предназначены для обеспечения электроэнергией систем аппарата на участке выведения до раскрытия панелей и при выполнении маневров на среднем и конечном участках траектории, когда панели не ориентированы на Солнце. Одна батарея может обеспечить потребность в электроэнергии для совершения маневров на среднем и конечном участках. Вес системы энергопитания—55,9 кГ. Разработчики: солнечных элементов — Heliotek Div. и Textron Electronics, защитного покрытия элементов—Optical Coating Laboratory., панелей— Ryan Aeronautical Co. и Aerospace Div.
6 телевизионных камер (16,45,48) предназначены для получения телевизионных изображений лунной поверхности, разработаны Astro—Electronics и Radio Corporation of America. Для частичного перекрытия изображений оптические оси камер расположены под небольшим углом друг к другу. Камеры скомплектованы в 2 независимых комплекта, со своим передатчиком и серебряно-цинковой батарей, состоящей из 22 элементов, обеспечивающих питание камеры в течение 1 часа. В первый комплект входят 2 камеры типа F (Full—scan—полное сканирование): Fa—с широким углом обзора и Fb—с узким утлом. Каждая камера работает сеансами продолжительностью 2,56 сек, затем в течение 2,56 сек подготавливается к следующему сеансу. Пока одна из камер производит съемку и передает изображения, вторая подготавливается к работе. Считывание изображений осуществляется за 2,24 сек. Изображения от камер первого комплекта поступают непрерывно. Несущая частота передатчика первого комплекта равна 959,52 Мгц. Изображение в кадре имеет размеры 11,17 Х 11,17 мм.
Во второй комплект входят 4 камеры типа Р (Partial— scan—частичное сканирование): Р2 и Р4 — с широким углом обзора, P1 и Р3—с узким углом. Камеры предназначены для получения изображения центральной части того участка поверхности Луны, который попадает в кадр камеры типа F. Каждая камера второго комплекта работает сеансами продолжительностью 0,2 сек, затем в течение 0,6 сек подготавливается к следующему сеансу. Пока одна камера производит съемку и передает изображения, остальные 3 камеры находятся в разной степени готовности. Время считывания изображений—360 миллисекунд. Изображения от камер второго комплекта также поступают непрерывно. Несущая частота передатчика второго комплекта 960,05 Мгц. Изображение в кадре имеет размеры 2,79 Х 2,79 мм. Кадры обеих типов камер имеют отношение высоты к ширине 1:1. Камеры Fa, Р3 и P4 рассчитаны на получение изображений при освещенности от 215 до 7000 лк, а камеры Fb, Р1и P2—от 860 до 29 063 лк; освещенность лунной поверхности принималась равной от 215 до 29 063 лк. В таблице 3 приведены характеристики телекамер.
Таблица 3
| Тип и индекс камеры | Угол зрения, град | Фокусное расстояние, мм | Светосила | Длительность экспозиции, сек | Линейная разрешающая способность передающей трубки, лин/мм | Количество линий разложения изображений |
| F | а | 25 | 25 | 1:0,95 | 1/200 | ~31 | 800 |
| b | 8.4 | 76 | 1:2 | 1/200 | ~31 | 800 |
| Р | 1; 3 | 2,1 | 76 | 1:2 | 1/500 | ~31 | 200 |
| 2; 4 | 6,3 | 25 | 1:0,95 | 1/500 | ~31 | 200 |
Передающей трубкой является видикон с электростатическим управлением. Ширина полосы пропускания видикона обеих камер—200 кгц. Диаметр видикона—25 мм. Камеры помещены в отсек, закрытый кожухом, имеющий форму усеченного конуса высотой 151 см и диаметром оснований 61 см и 42 см. Программой предусматривалось включение обоих комплектов камер за 15 мин до падения аппарата на Луну. Пять минут требуется на разогрев аппаратуры, за 10 мин до падения начинается съемка, которая прекращается за 2,5 сек до падения. В момент начала съемки аппарат
находится на расстоянии 1450 км от Луны, имея скорость 2,3 км/сек. В момент прекращения съемки аппарат находится на расстоянии 535 м от Луны (2). В таблице 4 приведены расчетные характеристики съемки.
Таблица4(11)
| Тип и индекс камеры | Площадь поверхности Луны в кадре при съемке | Линейная разрешающая способность камер на местности при съемке с миним. расстояния, м | Характеристики обозреваемого участка | Число кадров (расчетное) |
| с максим. расстояния, км2 | с миним. расстояния, м2 | координаты | длина, км |
| F | а | 390 000 | 9 000 000 | 0.9 | вдоль экватора от 20° c. ш. до 20° ю.ш. | 2 400 | 117 |
| b | 43 500 | 1 300 000 | 0,9 | 117 |
| P | 1; 3 | 2 720 | 390 | 0,9 | 714; 714 |
| 2; 4 | 24 600 | 3 520 | 0,9 | 714; 714
всего 3090 |
Изображения должны были приниматься станцией слежения системы DSIF в Голдстоуне с помощью двух антенн с отражателем диаметром 26 м, записываться на магнитную ленту и одновременно сниматься с экрана приемной телевизионной трубки на 35-миллиметровую пленку. Для записи изображений от камер типа F потребовалось бы 4,8 м пленки, от камер типа Р—15 м. Предусмотрены три независимых системы включения телекамер: автоматическая, от часов и по команде с Земли. Вес телекамер и связанного с ними оборудования—172,8 кГ, в т. ч. собственно телекамеры— 17,2 кГ, видеокомбинатор— 1,3 кГ, электронное оборудование телекамер—22,1 кГ, программное устройство—6,3 кГ, батареи (2 шт.) —39,1 кГ, передатчик и связанное с ним оборудование—31,8 кГ, элементы конструкции и различные детали — 55,0 кГ.
Для расследования причин отказа телевизионного оборудования была создана специальная комиссия NASA, которая пришла к выводу, что наиболее вероятной причиной было включение камер на атмосферном участке полета. Самопроизвольное включение произошло вследствие накопления заряда статического электричества или интенсивной вибрации, вызвавшей замыкание контакта реле в системе включения камер. Точно установить, произошло это включение или нет, не удалось. Косвенным подтверждением служит не предусмотренное программой включение через 2,5 мин после старта телеметрической аппаратуры, связанной с камерами; аппаратура проработала 67 сек. и выключилась. Предполагают, что при этом включились также и камеры, в результате чего произошло короткое замыкание в их электрической цепи, рассчитанной на работу в вакууме. Однако при предусмотренном программой включении телеметрической аппаратуры на 47 мин. полета переданная на Землю информация свидетельствовала о нормальном состоянии камер. В отчете комиссии содержатся замечания о конструкции и программе испытаний аппарата Ranger VI: комплекты камер не были полностью независимыми и имели некоторые общие элементы; телевизионное оборудование неоправдано сложно; изоляция электрических цепей недостаточна; конструкция аппарата не позволяла провести всеобъемлющую предстартовую подготовку; не проведены испытания направленной антенны в сочетании с передатчиками; не проведена проверка ряда систем непосредственно перед стартом (проверка не проводилась во избежание возможного повреждения аппарата). Телевизионное оборудование проверялось последний раз за 12 суток до старта. Для предотвращения самопроизвольного включения камер были предложены следующие мероприятия: проведение наземных испытаний для определения опасности накопления заряда статического электричества; установка блокирующего устройства, предотвращающего включение камер до отделения аппарата от ракеты-носителя; обеспечение дополнительной изоляции электрооборудования.
8. Космический аппарат Ranger VII (Ranger В)
(условное обозначение аппарата Р-54)
Назначение аппарата такое же, как и аппарата Ranger VI. Запуск аппарата произведен 28 июля 1964 г. в 16 час. 50 мин. 08 сек. (здесь и далее время по Гринвичу) со стартового комплекса № 13 м. Кеннеди ракетой-носителем Atlas—Agenа В (расчетное время—16 час. 50 мин.). Полет ракеты-носителя и аппарата проходил по траектории, близкой к расчетной. После выхода на траекторию полета к Луне аппарат Ranger В получил название Ranger VII, а по международной системе обозначение 1964—41А. 29 июля в период с 8 час. 54 мин. по 8 час. 58 мин. со станции слежения в Голдстоуне в программное устройство аппарата была введена команда на выполнение маневра коррекции траектории; без коррекции аппарат бы упал на невидимую сторону Луны. Выбранное место падения аппарата по наблюдениям с Земли было наиболее ровным и пригодным для посадки лунной кабины корабля Apollo. Район падения аппарата представлял эллипс 480 Х 80 км (в дальнейшем, при сближении с Луной, его размеры были уточнены и составили 80 Х 8 км). В 9 час. 40 мин. началась подготовка к проведению маневра. Передатчик аппарата был переключен с направленной антенны на всенаправленную, а направленная антенна убрана, чтобы избежать ее повреждения при работе двигательной установки.
В период проведения коррекции аппарат находился на расстоянии 160 000 км от Земли. Перед включением двигательной установки аппарат совершил поворот по крену на 5,6° и по тангажу на 86,8°. Установка проработала 50 сек, сообщив приращение скорости 30 м/сек. 31 июля в 13 час. 08 мин. 39 сек. были включены камеры типа F, а в 13 час, 12 мин. 08 сек.—камеры типа Р. В этот момент аппарат находился на расстоянии 1800 км от Луны. В 13 час. 25 мин 49 сек. аппарат упал на Луну в районе Моря Облаков в точке с селенографическими координатами 10°38' ю. ш. и 20°36' з. д., в 13 км от расчетной точки падения (11° ю. ш. и 21° з. д.). Падение аппарата предполагалось сфотографировать телескопом: на базе ВВС Патрик (шт. Флорида), но из-за его неисправности этого сделать не удалось (41,53). Впоследствии аппаратом Lunar Orbiter II был сфотографирован участок падения аппарата Ranger VII. Американские ученые считают, что на одном из полученных снимков им удалось обнаружить кратер, образовавшийся при падении аппарата (20). Обработка данных внешнетраекторных измерений при полете аппаратов Ranger VI и Ranger VII позволила на порядок повысить точность определения массы Луны и рассчитать с точностью до ±20 м разницу по долготе между станциями системы DSIF (40). Температура внутри аппарата поддерживалась в диапазоне (27-32)° С с точностью до нескольких градусов.
Конструкция и состав бортового оборудования аппарата такие же, как у аппарата Ranger VI. Часть аппаратуры подверглась модификации (25): сокращено с 5 мин. до 1 мин. 20 сек. время, потребное для прогрева камер, что позволило увеличить длительность их работы и получить на 25% больше изображений поверхности Луны, чем планировалось при запуске аппарата Ranger VI; дополнительно установлены датчики, измеряющие силу тока, вырабатываемого батареями; для предотвращения случайного включения телевизионного оборудования на атмосферном участке полета установлены фильтры, исключающие самопроизвольное срабатывание командной системы камер под воздействием заряда статического электричества; установлено блокирующее устройство, предотвращающее включение временного механизма (механизм предназначен для автоматического включения камер в том случае, если их не удастся включить по команде с Земли) до отделения аппарата от ракеты-носителя. Временной механизм подсоединяется к командной системе через 32 часа после его включения; введены изменения в телеметрическую систему, в частности, увеличено с 15 до 90 число параметров телевизионной системы, измеряемых во время разогрева камер. В период подготовки к полету аппарат, доставленный на м. Кеннеди, был разобран и телевизионное оборудование было возвращено изготовителю для модернизации с учетом полета аппарата Ranger VI. Предполетные испытания аппарата проводились в более жестких условиях, чем аппарата Ranger VI: вибрационные, термические и вакуумные испытания велись одновременно, амплитуда колебаний при вибрационных испытаниях была увеличена вдвое. Суммарный вес аппарата — 365,6 кг (46)
Всего получено 4316 телевизионных изображений лунной поверхности (39). Первое изображение получено камерой типа F с расстояния 1800 км от Луны за 13 мин. до падения аппарата. В кадре находится участок поверхности размером 480х640 км. Последнее изображение получено камерой типа Р с расстояния 300 м за 0,12 сек. до падения аппарата. В кадре находится участок поверхности размером 30Х18 м (53). Съемка продолжалась около 17 мин, во время съемки вектор скорости аппарата составлял с местной вертикалью 12°, с оптической осью телевизионной системы—23,7°, высота Солнца над лунным горизонтом — 22,5° (41). На станции слежения в Голдстоуне полученные с аппарата сигналы поступали в телевизионный приемник, с экрана которого фотографировались на 35-миллиметровую пленку. Сигналы также записывались на магнитную ленту.
Стоимость изготовления и запуска аппарата, включая стоимость ракеты-носителя,—28 млн. долл.
9. Космический аппарат Ranger VIII (Ranger С) (14, 17, 42)
(условное обозначение аппарата Р-55)
Назначение аппарата такое же, как у аппарата Ranger VII. Запуск аппарата произведен 17 февраля 1965 г. в 17 час. 05 мин. 01 сек. со стартового комплекса № 13 м. Кеннеди ракетой-носителем Atlas—Agena В. Полет ракеты-носителя и аппарата проходил по программе, близкой к расчетной. После выхода на траекторию полета к Луне аппарат Ranger С получил название Ranger VIII, а по международной системе обозначение 1965—10А. 18 февраля, в 10 час, когда аппарат-находился на расстоянии 160 000 км от Земли, проведена коррекция траектории. Перед включением двигательной установки аппарат совершил поворот по крену на 11,6° и по тангажу на 151,8°. Корректирующая установка проработала 59 сек., сообщив приращение скорости 36,2 м/сек (без коррекции аппарат прошел бы на расстоянии 1830 км от Луны). Коррекция траектории, включая маневры по тангажу и рысканью, проведена за 12 мин. 20 февраля в 9 час. 57 мин. аппарат упал на Луну в районе Моря Спокойствия в точке с селенографическими координатами 2°43 с. ш. и 24°38' в. д., в 23 км от расчетной точки падения (3° с. ш. и 24° в. д.). Аппарат находился в полете 64 час. 51 мин. 59 сек. (15). В ноябре 1967г. аппаратом Lunar Orbiter II получены изображения района падения аппарата; на одном из снимков, по мнению американских ученых, удалось обнаружить кратер, образовавшийся при падении.
Конструкция и состав бортового оборудования аппарата (30,43) такие же, как у аппаратов Ranger VI и Ranger VII, за исключением части аппаратуры, подвергшейся модификации: камеры Р—1 и Р—4 снабжены усовершенствованными видиконами, сила тока на выходе усовершенствованного видикона 2 X 10-8 а (ранее— 1х10-8 а), линейная разрешающая способность — 39 лин/мм; разрешающая способность камер с новыми видиконами на местности—0,45 м; все камеры откалиброваны в расчете на яркость от 21,5 до 18 300 лк; мощность усилителя в бортовом передатчике повышена с 6 до 8-10 вт; сокращено число контактов кабельной сети и улучшена ее изоляция; увеличена чувствительность телеметрических передатчиков, регистрирующих разрядку батарей, которые питают камеры и связанное с ними оборудование. Суммарный вес аппарата—366,9 кг.
Первоначально камеры предполагалось включить за 13 мин. до падения аппарата, но затем было принято решение включить их за 23 мин. с целью получения большего числа телевизионных изображений. Всего получено 7137 изображений, охватывающих поверхность площадью 2 374 000 км2. Первые изображения получены с высоты 2450 км, последние — с нескольких сот метров над поверхностью Луны. Во время съемки вектор скорости аппарата составлял с местной вертикалью угол 41,7°, а оптическая ось камеры была отклонена от вектора скорости на 14°. По рекомендации специалистов Научно-исследовательского центра разработки пилотируемых космических кораблей участок падения аппарата выбран с таким расчетом, чтобы во время съемки высота Солнца над лунным горизонтом составляла менее 10°, что позволяет по тени на склонах кратеров выявить кратеры с крутизной склонов более 10°. Это важно для определения участков посадки аппарата Surveyor и лунной кабины корабля Apollo, которые могут совершать посадку на склоны крутизной не более 15°.
10. Космический аппарат Ranger IX (Ranger D)
(условное обозначение аппарата Р-56)
Назначение аппарата такое же, как у аппарата Ranger VIII. Запуск аппарата произведен 21 марта 1965 г. в 21 час 37 мин. 02 сек. со стартового комплекса № 13 м. Кеннеди ракетой-носителем Atlas-Agena В. Полет ракеты-носителя и аппарата проходил по программе, близкой к расчетной. После выхода на траекторию полета к Луне аппарат Ranger D получил название Ranger IX, а по международной системе обозначение 1965—23А. 23 марта в 12 час. 03 мин., когда аппарат находился на расстоянии 280 000 км от Земли, проведена коррекция траектории полета (без коррекции аппарат достиг бы Луны в точке с селенографическими координатами 4,1° с. ш. и 2,3° з. д., в 520 км от рассчетной точки падения). 24 марта в 14 час. 08 мин. 20,06 сек. аппарат упал на Луну в районе кратера Альфонса в точке с селенографическими координатами 12°58' ю. ш. и 2°22 з. д. в 4,5 км от расчетной точки падения (13° ю. ш. и 2,5° з. д.) и в 290 км от линии терминатора. Аппарат находился в полете 64 час. 31 мин. 18 сек. (26,28,56).
Конструкция и состав бортового оборудования аппарата такое же, как у аппарата Ranger VIII, кроме камер, снабженных усовершенствованными видиконами. Применение более чувствительного материала в видиконах повысило силу электрического сигнала вдвое, до 4 x 10-8 а. Линейная разрешающая способность — 59 лин/мм, разрешающая способность на местности—0,25 м. Камеры откалиброваны на получение снимков при яркости от 323 до 16150 л/с. Количество линий разложения изображения для камер типа F—1152, для камер типа Р—300 (13, 28, 47). Суммарный вес аппарата— 366,9 кГ (54).
Всего получено 5814 телевизионных изображений поверхности Луны (5). При сближении с Луной аппарат ориентирован так, чтобы центральная ось камер совпадала с вектором скорости, что позволило избежать «смазывания» изображения (на предыдущих аппаратах такой ориентации не производилось). Для такой ориентации аппарат совершил маневры по тангажу на +5,2°, затем по крену на (—16,3°) и снова то тангажу на (—20,5°). Разогрев телевизионной системы начался за 20 мин. 07 сек., а включение системы на полную мощность—за 18 мин. 47 сек. до падения аппарата. Камеры начали работать за 17,5 мин. до падения, когда расстояние до поверхности Луны составляло 2360 км, а съемка прекратилась за 0,2 сей до падения аппарата, когда до поверхности оставалось 610 м (13). В период работы камер вектор скорости составлял с местной вертикалью 25,1°, высота Солнца в месте падения аппарата — 10°. Камеры- сняли участок поверхности, ограниченной координатами 0° ю. ш. и 45° з. д.; 10° ю. ш. и 5° в. д.; 3,5° ю. ш. и 45° з. д.; 35° ю. ш. и 5° в. д. (54). Телевизионные изображения принимались станцией слежения в Голдстоуне. Специальное устройство, разработанное Electrodynamics, обеспечивало преобразование изображений, полученных камерой Fb. Этим устройством в коммерческую телевизионную сеть США передано около 200 изображений поверхности в реальном масштабе времени.
11. Финансирование программы Ranger
Суммарные расходы по программе Ranger составили около 260 млн. долл., в том числе— 170 млн. долл. на аппараты и около 90 млн. долл.—на приобретение ракет-носителей. Распределение бюджетных ассигнований на программу и их доля в общих ассигнованиях на космические исследования представлены в таблице 5 (годы указаны финансовые) .
Таблица 5
| | 1962 г. | 1963 г. | 1964 г. | 1965 г. | 1966 г. |
Ассигнования на программу Ranger,
млн. долл. | 63,4 | 78,9 | 30.306 | 11,037 | 1,0 |
Доля ассигнований в общем бюджете NASA
на космические исследования, % | 3,528 | 2,175 | 0,600 | 0,213 | 0,019 |
12. Некоторые итоги программы Ranger
Программа изучения Луны аппаратами Ranger была начата в 1961 году и завершена в 1965 году. Всего по программе запущено 9 аппаратов. Программа состояла из 3-х этапов.
На первом этапе (1961 г.) предполагалось отработать программу вывода аппаратов на геоцентрическую орбиту с большим эксцентриситетом, провести испытания бортового оборудования и осуществить ряд научных экспериментов. Запущены аппараты Ranger I и Ranger II. Запуски были неудачными: аппараты не вышли на расчетную орбиту (не произошло повторного включения двигателя II ступени). Проведены частичные испытания бортового оборудования и часть из запланированных научных экспериментов.
На втором этапе (1962 г.) предполагалось получить телевизионные изображения поверхности Луны перед падением аппарата и доставить на поверхность Луны приборный контейнер для проведения научных экспериментов. Запущены аппараты Ranger III, Ranger IV и Ranger V. Ни один из аппаратов не вьшолнил своей задачи, поверхности Луны достиг только аппарат Ranger IV, но телевизионных изображений получить не удалось. Два других аппарата, не достигнув Луны, вышли на гелиоцентрические орбиты. Неудачи аппаратов Ranger на этом этапе американские ученые объяснили воздействием на бортовое оборудование повышенной температуры, которой подвергались аппараты при термической стерилизации.
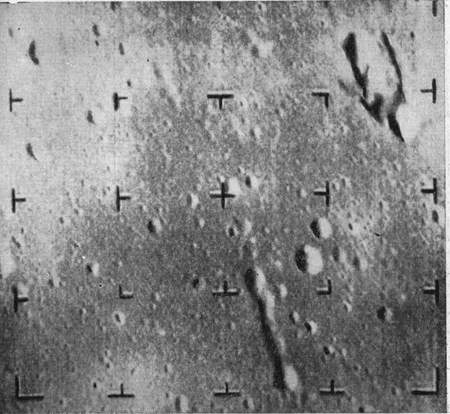
На третьем этапе (1964—1965 гг.) предполагалось получить телевизионные изображения поверхности Луны перед падением аппарата. Установка научной аппаратуры на аппаратах этого этапа не предусматривалась. Запущены аппараты Ranger VI—IX. Тремя последними из них получено и передано на Землю более 17 200 изображений поверхности Луны. Часть снимков представлена на рис. 11—13. Аппарат Ranger VI достиг Луны, но получить изображения не удалось. Впервые получены изображения лунной поверхности с близкого расстояния (до 300 м). Каких-либо новых типов образований не обнаружено. Основной особенностью рельефа являются кратеры, наличие которых прослежено вплоть до диаметров 1 м. Выяснено, что последовательность кратеров является непрерывной, вплоть до самых малых образований. Кратеры разделяются на два типа: первичные—с резко выраженными краями, чашеобразные, и вторичные, относительно менее глубокие, со сложными очертаниями, образованные выбросами из первичных кратеров (52). Число первичных кратеров с уменьшением диаметра вдвое возрастает ~в 4 раза. Вторичные кратеры концентрируются преимущественно на расстоянии до 3 диаметров от первичных, размеры их в 10—20 раз меньше, чем первичных. Количество их растет с уменьшением диаметра быстрее, чем первичных, особенно оно велико на лучах крупных кратеров (106 на 1 км2 на луче кратера Тихо). По-видимому лучи образованы выбросами из крупных кратеров (38). Новым типом кратеров являются так называемые кратеры-конусы (димпл-кратеры), по-видимому, обязанные своим происхождением проседанию грунта в подповерхностные пустоты. Такова же, вероятно, природа и неглубоких депрессий на поверхности. На дне кратера Альфонс воронки и депрессии проседания занимают 90% форм рельефа (9). Внутри кратера Альфонс вокруг мелких кратеров заметны черные ореолы, по-видимому, следы вулканической деятельности. Во всех изученных участках многочисленны линейные цепочки кратеров, а также груды,
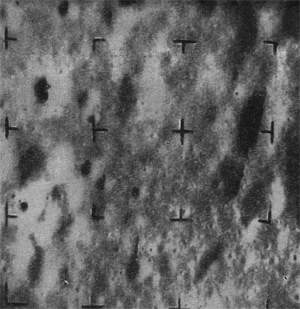
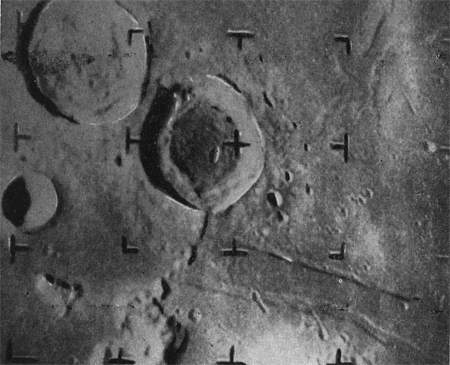
Рис. 11. Изображения лунной поверхности района Моря Облаков, полученные 31 июля 1964 г аппаратом Ranger VII в период падения на Луну.
a) Изображение района кратера Герике полученное телекамерой Fb с высоты 750 км. В верхнем правом углу—кратер Герике (диаметр 60 км). Наименьшие видимые кратеры имеют диаметр 240 м. Север на этом и следующем снимке находится сверху, восток—справа. б) Часть cнимка, сделанная телекамерой Fa с высоты 4,8 км за 2,3 сек до падения аппарата охватывает поверхность шириной 2,6 км. У левого края расположен кратер диаметром 92 м, на дне которого видны горные пики. Наименьшие видимые кратеры имеют диаметр 9 м и глубину 3 м.
a
б
в
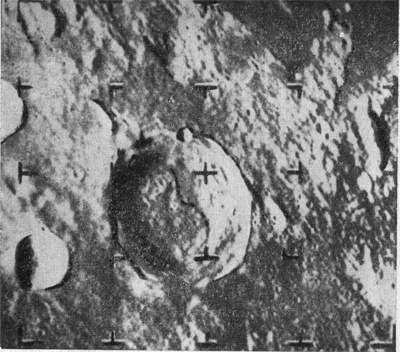
Рис. 12. Изображения лунной поверхности района Моря Спокойствия, полученные 20 февраля 1965 г. аппаратом Ranger VIII в период падения на Луну
а) Изображение лунной поверхности в районе кратера Деламбр полученное телекамерой Fb с высоты 756 км. В центре — кратер Даламбр (диаметр 52 км) на его дне видны мелкие кратеры. Внизу слева — кратер Теон младший (диаметром 16 км). В правом верхнем углу—темная плоская поверхность Моря Спокойствия, в которое врезается острый материковый мыс. Север на этом и последующих снимках находится сверху.
б) Изображение кратеров — близнецов Риттер (слева) (диаметр 32 км) и Сабин в южной части Моря Спокойствия получено телекамерой Faс высоты 243 км за 2 мин 15 сек до падения аппарата. В нижней части - две параллельных бороздки и Гипатия
в) Изображение лунной поверхности полученное телекамерой Fb с высоты 80 км за 45,6 сек до падения аппарата. Изображенная поверхность имеет размеры 19 км с востока на запад и 13,7 км с севера на юг. В правом верхнем упу расположен комплекс больших углублений длиной 4,8 км. Наименьшие видимые кратеры имеют диаметр 152 м.
параллельные известным складчатым горным цепям и другим линейным образованиям эндогенного происхождения (51). Крупных глыб и камней на поверхности мало. Изредка глыбы можно заметить внутри образованных ими вторичных кратеров. Мелкомасштабных трещин на поверхности не обнаружено. Мелкомасштабный рельеф ровный, крутизна поверхности не превышает 5° на расстоянии до 30 м, на больших расстояниях она еще меньше. Поверхность покрыта, по-видимому, слоем рыхлого мелкодисперсного вещества, толщина которого, вероятно, не менее 5 м (7). Анализ полученных снимков позволил сделать предположение, что грунт может выдержать нагрузку до 10 кг/см2, и выявить участки поверхности, пригодные для посадки лунной кабины корабля Apollo. По результатам внешнетраекторных измерений удалюсь на порядок повысить точность определения массы Луны.
Библиография
1. Biasi V. de. Another failure, another board. «Space/Aeronaut.», 1964, 41, №2, 37
2. Вubb М. High hopes for lunar photos ride on Ranger VI launch. «Electron. News», 1964, 9, № 414, 12
3. Сlark E. Ranger 3 flight stirs reliability question. «Aviat. Week and Space Technol.», 1962, 76, № 6, 30—32 1962, 10.51.549
4. First details of Ranger Ills lunar instruments. «Missiles and Rockets», 1961, 9, № 12, 92—93
5. Flight to Alphonsus. «Flight Internal.», 1965, 87, №2928, 660—651,1966, 1.62.85
6. Further Ranger 4 data. «Interavia Air Letter», 1962, №4978, 5
7. Jaffe L. D. Lunar dust depth in Mare Cognitum. «il. Geophys. Res.», 1966, 71, 1095—1103, 1966, 8.62.214
8. Кolcum E. Н. Three Ranger Hard—landing flights eliminated; four others delayed. «Aviat. Week and Space Tachnol.», 1963, 79, №5, 17—18.
9. Кuiper G. P. Lunar results from Ranger 7 to 9. «Sky and Teleskope», 1965, 29, № 5, 293— 308
10. La Fond Сh. D. Ranger to provide real moon close-up. «Missiles and Rockets», 1962, 10, №5, 32—33, 1961, 7.51.731
11. Launch of Ranger lunar impact spacecraft. «Interavlia Air Letter», 1964, №5421, 6
12. Lunar surface data is goal of Ranger 3. «Aviat. Week and Space Technol.», 1962, 76, №4, 37—38
13. Lunar TV via Rangers. «Flight Internal», 1966, 87, №2925, 506, 1965, 12.62.70
14. Lуtlletоn R. A., S t u b b s P. Ranger VIIIs Moon pictures. «New Scientist», 1966, 25, №432, 487—490, 1966, 3.62.249
15. Mid—course change puts Ranger in target. «Aviat. Week and Space Technol.», 1.965, 82, № 8, 34, 1965, 12.62.67
16. NASA, IPL seek cause of Ranger failure. «Aviat. Week and Space Technol », 1964, 80, № 6, 22—25, 1964, 11.62.52
17. NASA preparing for Ranger IX next month; Ranger VIII returns 7162 photcs «Missile/Space Daily», 1966, 11, №37, 323—324 1965, 12.62.68
18. NASA cpurs lunar impact program. «Missiles and Rockets», 1960, 6, № 18, 15, 1961, 1.51.503
19. Northrop Ranger responsibility. «Interavia Air Letter», 1963, №5200, 2—3
20. Orbiter 2 photos used to identify Ranger 8 crater. «Aviat. Week and Space Technol », 1967, 86, №4, 30—31, 1967, 8.62.223
21. Pay Rex. IPL looks for answer to Ranger VI malfunction. «Missiles and Rockets», 1964, 14, №6, 16.
22. Projected launch of Ranger 5. «Interavia Air Letter», 1962, №5098, 5—6.
23. Race to Moon «Electron. News», 1964, 9, №41|5, 13, 1864, 11.62.43
24. Ranger backup shot set for October. «Missiles and Rockets», il961, 9, №9, 10
25. Ranger Block III extensively modified. «Missile/Space Daily», 1964, 8,№ 16, 105, 105A, 1965, 5.62.94
26. Ranger IX expected to show whether Moon has active volcanos. «Missile/Space Daily», 1965, 12, № 17, L29—130, 1966., 1.62.84
27. Ranger failures possibility due to sterilization. «Interavia Air Letter»;. 1963, №5161, 6
28. Ranger IX gives best accuracy, resolution; seen aiding Surveyor. «Missfc Ie/Space Daily», 1965, 12, №20, 154, 1966, 1.62.273
29. Ranger I is most sophisticated U. S. spacecraft. «Missile and Rockets» 1961, 9, №5, 14—15.
30. Ranger 8 launch. «Interavia Air Letter», 1965, №5689, 5—6
31. Ranger 2 launch fails. «Interavia Air Letter», 1961, №4871, 5.
32. Ranger launch still slipping. «Missiles and Rockets», 1963, 13, № 10, 9
33. Ranger lunar hard lander. «Missiles and Rockets», 1963, 13, № 15, 60—67 1964, 8.62.71
34. Ranger 3 lunar probe programme details. «Interavia Air Letter», 1962, № 4914, 4—6
35. Ranger 4 Moon crash. «Interavia Air Letter», 1962, №4980, 2—3.
36. Ranger III: most complicated and procusing. «Missiles and Rockets»,. 1962, 10, №4, 18.
37. Ranger 4 only a partial success. «Interavia Air Letter», 1962, №4077, 5.
38. Ranger VII—photographic mission to the Moon. COSPAR Inform. Bull,1965, №22, 52—74.
39. Ranger 7 photographs Moon. «Flight Internal.», 1964, 86, № 28&1, 229.
40. Ranger pinpoints DSIF stations. «Missiles and Rockets», 1966,-16, №12, 23.
41. Ranger VII proves Apollo feasibility. «Missiles and Rockets», 1964, 15,. № 6, 16—18, 21—22, 24, 1965, 4.62.74
42. Rangers 8, 9 readied for flights to Moon. «Aviat. Week and Space Technol.», 1965, 82, №7, 52, 1965, 12.62.102
43. Ranger 8s sharper eyes. «Electronics», 1965, 38, №4, 50
44. Ranger shot postponed. «Missiles and Rockets», 1961, 9, №6, 10.
45. Ranger shot set this month. «Interavia Air Letter», 1964, №5419, 6.
46. Ranger 7 specifications. «Interavia Air Letter», 1964, №5552, 6.
47. Bu b b М. If all goes well-6 cameras will provide 4000—7000 photos «Electron. News», 1965, 10, №48.1, 38.
48. Strasser J. A. The Moon: we look before we leap. «Electronics»; 1964,-й 37, №4, 14—15. 1964, 10.62.51
49. Synchronized Ranger TV cameras to photograph lunar impact area. «Aviat. Week and Space Technol.», 1962, 76, №2, 29.
50.The high cost of exploring the Moon: Saturn SA—5 and Ranger 6. «Interavia», 1964, 19, № 3, 293.
51. The Ranger lunar missions. COSPAR Inform. Bull., 1965, №26, 69—90,. 1966, 4.62.236
52. Urey Н. С. Observations of the Ranger photographs. «The nature of the-lunar surface»., John Hopkins Press, 1966, 3—21.
53. W a t k i n s Н. D. Ranger photos boost cofidenoe in Apollo. «Aviait. Week and Space Technol.» 1964, 81, №6, 19—23, 1965, 3.51.446
54. Watkins Н. D. Surveyor unit permits live TV broadcast from Ranger 9. «Aviat. Week and Space Technol.». 1965, 82, №13, 26-27, 1966,2.62.112
55. Wilks B. Documentation error lost Ranger III photos. «Missiles and. Rockets», 1962, 10, №8, 33
56. Wilks W. E. Apollo crater landing seen possible. «Missiles and Rockets», 1965, 16, № 13, 26, 2S-.39, 1966, 12.62.403
назад