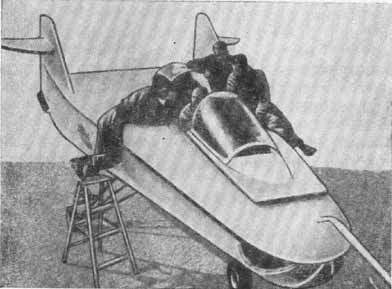
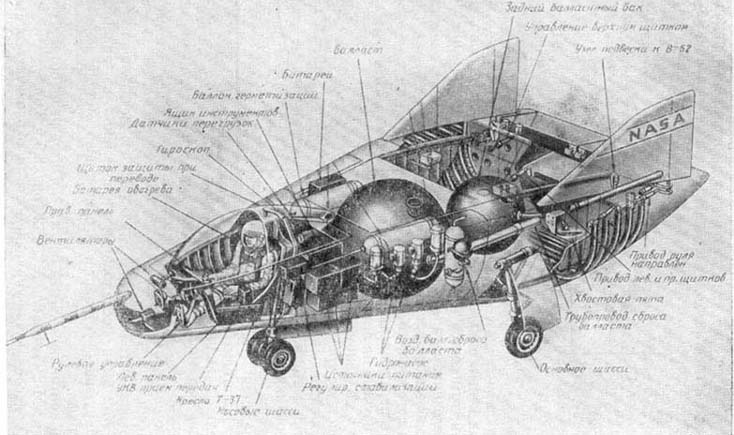
Рис. 3.1
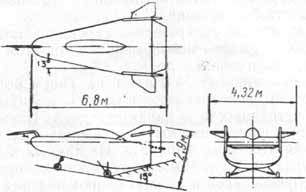
Общий вид летательного аппарата М-2 показан на рис. 3.1, схема—на рис. 3.2. Его конструкция во многом напоминает конструкцию планера. Для элементов конструкций используется фанера из красного дерева толщиной 2,4 мм. Шпангоуты толщиной 3,18 мм также изготавливались из красного дерева, подкрепленного елью. Для наружной обшивки использовался дакрон, покрытый специальным лаком. Внутренняя конструкция и шасси выполнены из сварных стальных труб. Передняя и задние стойки шасси являются слегка модифицированными шасси «Cessena 150». Демпфер шасси состоит из цилиндра, в котором перемещается поршень. Внутренняя полость цилиндра заполнена машинным маслом. С помощью испытаний сбрасыванием и изменения вязкости масла была получена желаемая степень демпфирования. В летательном аппарате М-2 устанавливалось модифицированное катапультируемое сиденье Т-37, которое вместе с парашютом весило 45 кг.
Вертикальные стабилизаторы, рули и элевоны изготовлены из алюминиевых листов толщиной 0,4 мм. Закрылки сварены из алюминиевых труб и покрыты дакроном. Над кабиной пилота установлен модифицированный плексигласовый колпак, применяемый на планерах и обеспечивающий пилоту обзор вперед и в стороны. Буксировочный крюк расположен на стойке переднего шасси ниже корпуса. На летательном аппарате установлены маленькие РДТТ тягой 104—114 кг в течение 10 сек. Чтобы подтвердить результаты полученных расчетов на основе аэродинамических продувок моделей и оценить влияние реальной конструкции летательного аппарата на его характеристики, натурный летательный аппарат М-2 был испытан в большой аэродинамической трубе Эймского исследовательского центра.
На летательном аппарате М-2 установлена обычная система управления планера. Для управления по тангажу используются закрылки и наружные элевоны. Управление по крену осуществляется за счет дифференциального управления элевонами. Для управления по курсу служат рули направления.
Программа летных испытаний началась с наземных буксировочных испытаний. Было проведено несколько буксировок для проверки управляемости летательного аппарата и устойчивости движения по земле. По мере накопления пилотом опыта увеличивались скорости буксировки вплоть до достижения отрыва от поверхности земли. Скорость отрыва от земли 138,7 км/ч. Во время этих испытаний в буксировочный трос вставлялось динамометрическое звено, позволявшее измерить натяжение троса и получить данные о величине силы лобового сопротивления. Перед первым полетом было проведено около 60 буксировочных испытаний. При подборе самолета-буксировщика для летательного аппарата М-2 использовался парашют с точно известным лобовым сопротивлением. В качестве самолетов-буксировщиков испытывались самолеты С-47 и «Stearman». Вертикальная скорость подъема у самолета «Stearman» оказалась недостаточной, у самолета С-47—приемлемой.
Из-за низкой удельной нагрузки на крыло самолета-буксировщика буксируемый летательный аппарат может попасть в его турбулентный след и стать неуправляемым. Было проведено несколько буксировок с использованием планеров, которые позволили оценить ускорения при взлете, наиболее выгодное положение летательного аппарата при буксировке, длину буксировочного троса с тем, чтобы свести влияние турбулентного следа самолета-буксировщика к минимуму. Испытания показали, что расположение буксируемого летательного аппарата выше самолета-буксировщика и применение буксировочного троса длиной 300 м сводит эти нежелательные эффекты к минимуму.
Перед первым полетом М-2 было проведено четыре запуска РДТТ (два статических и два динамических), укрепленных на его конструкции для демонстрации конструкционной жесткости и влияния работающих двигателей на управляемость и устойчивость летательного аппарата. Первый динамический запуск был проведен во время наземной буксировки с поднятым передним колесом при скорости 110 км/ч. Пилот не отметил возмущений ни в плоскости тангажа, ни в плоскости рыскания. Вторые испытания РДТТ были проведены уже после освобождений буксировочного троса, когда летательный аппарат находился на высоте около 3 м над поверхностью Земли и имел скорость 175 км/ч. При этих испытаниях также не наблюдалось появления вредных эффектов. Наоборот, пилот заметил некоторое улучшение устойчивости полета летательного аппарата. Все испытания буксировкой с подъемом в воздух проводились рано утром с тем, чтобы полностью использовать преимущества безветренной погоды. При проведении первых полетов при возникновении устойчивого ветра скоростью более 9 км/ч полеты прекращались. По мере накопления опыта пилотирования эти требования ослаблялись, и впоследствии были проведены полеты при порывистых ветрах скоростью 18,5—28 км/ч, при легкой и умеренной турбулентности, созданной самолетом-буксировщиком С-47.
Все летные испытания проводились на Эдвардской базе ВВС США. Взлет осуществлялся со дна сухого озера, и полет выполнялся по кругу с таким расчетом, чтобы летательный аппарат мог сесть на дно сухого озера в случае обрыва троса при наборе высоты. Отсоединение летательных аппаратов от самолета-буксировщика осуществлялось на высоте 3000—3900 м, откуда совершалось свободное планирование. Последние 600 м высоты использовались пилотом для маневрирования при подготовке к посадке
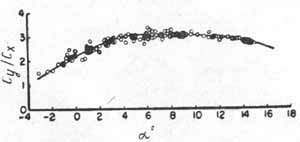
Летательный аппарат М-2 имел на своем борту измерительную систему, позволяющую получить полную информацию об его устойчивости и характеристиках движения. Первым объектом исследований являлась оценка возможности выравнивания летательного аппарата. Из данных о мгновенном изменении угла атаки в момент приземления при наземных испытаниях буксировкой и данных сопровождения с помощью кинотеодолита «Askanid» при летных испытаниях найдено, что вертикальная скорость в момент посадки была менее 1,5 м/сек, что позволило пилоту обеспечить выполнение маневра выравнивания. При определении летных характеристик использовался метод измерения нормальных и продольных ускорений при определенных углах атаки. Для определения аэродинамического качества использовалась зависимость
Зависимость аэродинамического качества летательного аппарата от угла атаки показана на рис.3.3.
Достоинством указанного метода является то, что информация об аэродинамическом качестве может быть получена во время маневрирующего полета, что позволяет получить большое количество информации в течение одного полета. Для анализа летной информации использовалась аналого-согласующая методика. На летательном аппарате было установлено механическое устройство для фиксирования положения рукоятки управления, чтобы гарантировать получение информации какого-либо влияния системы управления. Перед экспериментальными полетами летательного аппарата М-2 было проведено аналитическое исследование: 1) выравнивания и посадки, 2) устойчивости и управляемости. Из-за того, что имелось низкое расчетное максимальное аэродинамическое качество, основное внимание уделялось вопросу посадки летательного аппарата М-2. Процесс выравнивания и посадки был тщательно исследован с помощью цифровых и аналоговых вычислительных машин.
Результаты проведенного анализа с условием постоянной скорости изменения угла атаки при выравнивании показаны на рис 3.4, где также представлены данные, полученные при летных испытаниях. Если режим полета находится справа от кривой, то имеется избыток энергии для выравнивания летательного аппарата.
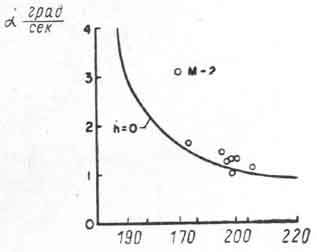 Рис. 3.4 |
Проблема выравнивания летательного аппарата перед посадкой была изучена на аналоговом моделирующем устройстве с тремя степенями свободы для отработки методики пилотирования при приближении к земле и определения требований, налагаемых на пределы видимости. Степень видимости регулировалась с помощью специального макета, где использовались теневые фотографии.
Боковая устойчивость и управляемость летательного аппарата М-2 были исследованы одновременно на аналоговом моделирующем устройстве и с помощью метода корневого годографа
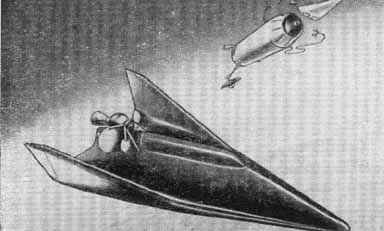
По контракту с NASA фирма Northrop разработала новый вариант М-2—корабль M-2/F-2 (рис. 3.5 и 3.6)
Для исследования управляемости на околозвуковых скоростях на аппарате устанавливается двигатель XLR-11 тягой 3600 кг. M-2/F-2 буксируется самолетом В-52 и сбрасывается на высоте 14 000 м. Продольное и поперечное управление M-2/F-2 осуществляется аэродинамическими рулями, расположенными в хвостовой части.

Продольное управление осуществляется элевонами, поперечное—дифференциальным отклонением поверхностей. Путевое управление осуществляется расщепляющимися рулями, которые могут быть использованы в качестве воздушных тормозов.
Астроплан (проект)—одноступенчатый крылатый многократно используемый космический аппарат, предназначенный для доставки большой полезной нагрузки на Орбитальную космическую станцию. Он может применяться и для грузовых и пассажирских перевозок в пределах земного шара на дальность порядка 10 000 км.
Астроплан имеет взлетный вес 4550 т, посадочный вес 330 т и может доставить на низкую орбиту вокруг Земли полезную нагрузку 200 т.
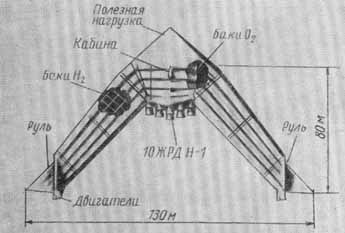
Стреловидные крылья астроплана (рис 3.7) скомпонованы из топливных баков. Чтобы сделать конструкцию наиболее эффективной по нагрузке, кислород, составляющий 74% взлетного веса, размещают в параллельных цилиндрических баках, расположенных перпендикулярно оси симметрии аппарата. К передней кромке баков крепится полезная нагрузка а на задней кромке устанавливаются десять ЖРД тягой по 680 т каждый. Жидкий водород, составляющий 15% взлетного веса расположен в цилиндрических баках, образующих стреловидные крылья. Аэродинамические рули установлены на концах крыльев и используются как топливные баки.
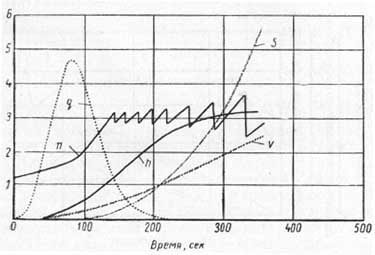
Траектория вывода астроплана на орбиту близка к траектории взлета баллистических ракет-носителей (рис 3.8).
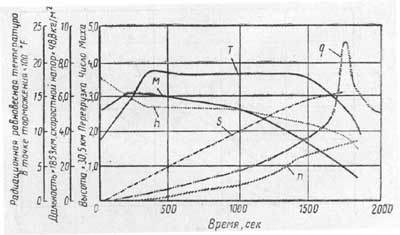
Астроплан стартует вертикально, в течение 365 сек активного полета летит по траектории с нулевой подъемной силой, достигая на высоте 93 км скорости, несколько превышающей круговую; максимальное ускорение на активном участке не превышает 3,5 g и регулируется дросселированием двигателей. После выключения основных двигателей астроплан по переходному эллипсу Хомана выходит на орбиту ожидания высотой 150—185 км, на которой остается до тех пор, пока угол между ним и орбитальной космической станцией не будет оптимальным для выполнения маневра встречи. Маневр встречи и швартования выполняется с помощью двигателей управления вектором тяги; эти же двигатели используются для торможения при входе в атмосферу.
Большим преимуществом крылатых космических кораблей по сравнению с баллистическими является возможность в любой момент произвести посадку с орбиты на заранее заданный аэродром.
Максимальная температура конструкции астроплана при входе в атмосферу (рис.3.9) находится в пределах, допускаемых для сплавов на никелевой основе. Так как малая удельная нагрузка на крыло и большие аэродинамические силы аппарата на больших углах атаки позволяют сохранить большую высоту в период максимального нагрева, значительно снижается по сравнению с баллистическим входом удельный тепловой поток. Максимальная температура передней кромки астроплана при входе в атмосферу 1040° (см. рис.3.9).
Астроплан производит планирующую посадку на аэродром. Аэродинамическое качество астроплана на малой скорости 4,5, т.е почти такое же, как у Х-15, но удельная нагрузка на крыло в три раза меньше. Скорость срыва 175 км/ч обеспечивает хорошие маневренные характеристики и простую посадку с выключенными двигателями. В аварийных случаях экипаж спасается в специальной капсуле.
Силовая установка. При современном уровне развития ракетной техники единственным топливом, имеющим характеристики, обеспечивающие полет одноступенчатого аппарата на орбиту и обратно, является жидкий водород плюс жидкий кислород. В настоящее время на этом топливе работают ЖРД М-1 и J-2. ЖРД с постоянным секундным расходом и постоянной тягой удовлетворяют требованиям, предъявляемым к двигателям астроплана, но для снижения требований к двигателям управления тягой желательно, чтобы М-1 и J-2 допускали дросселирование до 75% тяги, а также аварийное форсирование двигателя на 10%.
Схема астроплана такова, что при остановке одного из основных двигателей получается небольшой момент относительно центра тяжести. Для компенсации этого момента используются двигатели управления вектором тяги, установленные на концах крыльевых баков (по четыре ЖРД тягой 45 т каждый).
Управление ориентацией астроплана осуществляется 12 ракетными двигателями тягой 455 кг каждый.
В таблице, представлены геометрические характеристики астроплана:
| Крыло | Центроплан | Рули | |
| Площадь, м2 в плане | 1950 | 560 | 156 |
| поверхности | 5030 | 1685 | 361 |
| миделя | 555 | 275 | 64 |
| Отношение толщины к хорде | 0,236 | 0,52 | 0,195 |
| Удлинение | 2,87 | 1,0 | 2,0 |
По контракту с ВВС США фирма Canadair разработала космический корабль и провела исследование спасения экипажа на всех стадиях полета Земля—Орбита— Земля.
Предполагалось, что космический корабль с экипажем из двух человек будет запускаться на орбиты высотой 370— 36 000 км ракетой-носителем с ЖРД. Корабль имеет гиперзвуковое аэродинамическое качество больше 1 и высокое качество на дозвуковом режиме, обеспечивающее простую самолетную посадку на аэродром. Форма аппарата выбрана минимизирующей аэродинамический нагрев при входе в атмосферу. Кабина разделена на два отсека. Передний отсек используется при выходе на орбиту и входе в атмосферу. В нем находится управление кораблем и аварийные системы, система связи, навигации, система аварийного спасения; объем отсека 5 м3. Задний отсек разделен герметической перегородкой на две части. Передняя часть со свободным объемом 6,5 м3 используется экипажем для выполнения работы на орбите. Задняя часть заполнена азотом для предотвращения пожара. В пей расположены оборудование подачи криогенного топлива, система обеспечения жизнедеятельности экипажа. Защитное покрытие для безопасного полета через радиационные пояса должно весить около 9 т при общей интенсивности излучения 70 р. Вес защиты может быть уменьшен на 50%, если использовать конструкцию, правильно расположить оборудование и приборы. Во время прохождения через радиационные пояса и при солнечных вспышках экипаж должен находиться в защищенном отсеке.
Общий вес корабля, кг ......... 10800
Защитное покрытие, кг . ..... 3600
Удельная нагрузка на крыло, кг/м2 . . 116
Фирма Martin по контракту с ВВС США разработала космический корабль SV-5, который будет использоваться для перевозки экипажей и грузов Земля—Орбитальная станция — Земля (рис.3.10) Космический корабль SV-5 имеет стреловидную лодкообразную форму и тупой нос почти сферического сечения. Кривизна верхней поверхности значительно больше, чем нижней. Три вертикальных стабилизатора имеют рули направления или будут полностью подвижными.

Управление тангажем осуществляется элевонами, которые имеют дифференциальную связь для управления маневром с креном.
На режимах входа в атмосферу, где аэродинамических ручей недостаточно, используются реактивные сопла. Предполагается, что неравномерное разрушение абляционной защиты будет сильно сказываться на работе рулей управления. Во время гиперзвуковых летных испытаний беспилотной модели SV-5 важное значение придается исследованию маневренности так как предыдущие разработки были сосредоточены на системах с баллистическим входом в атмосферу. По экономическим соображениям первые суборбитальные полеты будут осуществлены на кораблях SV-5 небольших размеров весом 200—900 кг, без системы спасения. Одновременно с гиперзвуковыми испытаниями моделей решено проводить летные испытания большого пилотируемого корабля SV-5 на устойчивость и управляемость на дозвуковых режимах и на отработку посадки.
Идея сочетания большого полезного объема и конструктивной простоты баллистических аппаратов типа «Mercury» и «Gemini» с маневренностью крылатого космического корабля может оказаться весьма перспективной. Наличие крыла на гиперзвуковом аппарате сопряжено с необходимостью разрешать ряд сложных конструктивных проблем, поскольку при входе в атмосферу будут возникать значительные тепловые и силовые нагрузки на крыло Если функции крыла выполняет корпус, конструкция упрощается и имеет меньший вес. Для указанных целей можно подобрать тела разнообразных конфигураций. Одна из моделей, изучаемых фирмой Martin, показана на рис 3.11. Такой космический корабль обладает большой маневренностью, может выполнять боковой маневр в пределах до 13 000 км и маневр по дальности 16 000 км и больше. Применение двигателя на дозвуковом режиме полета еще больше улучшит маневренные качества. Такие корабли будут использоваться многократно в полетах Земля—Орбита—Земля. После полета потребуется лишь заменить теплозащитные сублимирующие панели. Такие корабли с экипажем 1—12 человек могут выводиться на орбиту ракетой-носителем «Titan-Ill».
Предполагается, что после осуществления проекта «Apollo» США подготовят пилотируемый полет к Марсу.
Большинство систем и оборудования корабля для полетов к Марсу будет аналогичным системам и оборудованию корабля «Apollo». Корабль должен иметь высокое аэродинамическое качество и более совершенную систему теплозащиты, так как при возвращении из полета к Марсу скорость входа в атмосферу Земли будет 13—18 км/сек. Наиболее вероятно, что для запуска с Земли будет использоваться ракета-носитель «Saturn V». Для старта с околоземной орбиты весьма желательно использовать ядерные ракетные двигатели, чтобы уменьшить число необходимых ракет «Saturn V» и количество встреч на орбите старта от Земли.
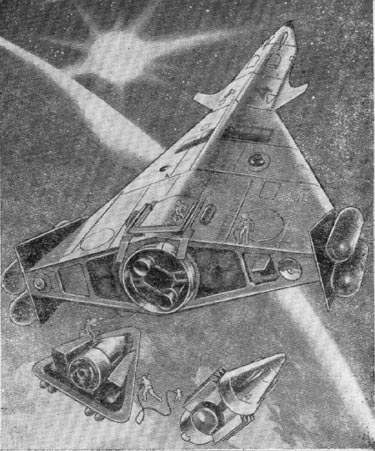
По современным представлениям NASA, в полет к Марсу должны быть отправлены одновременно два космических корабля (рис. 3.12, 3.13).
Каждый корабль будет иметь отсек с оборудованием, командный отсек и отсек посадки на Марс. В случае появления неисправностей в одном из кораблей в любой стадии полета его команда может покинуть аварийный корабль в своем командном отсеке и присоединиться ко второму кораблю. Следовательно, каждый корабль должен вмещать удвоенный экипаж (всего шесть человек). Отсеки с оборудованием и командный будут работать в переменном поле тяготения с перегрузкой от 0 до 0, 6. Основные жилые помещения будут в отсеке оборудования. Командный отсек используется при выходе на орбиту, во время входа в атмосферу и посадки, а также при аварийном покидании корабля. Посадочный (на Марс) отсек будет оставлен на орбите вокруг Марса после того, как экипаж перейдет в отсек оборудования. Последний будет сброшен перед входом в атмосферу Земли.
По предварительным исследованиям, число участников экспедиции к Марсу должно составлять от трех до восьми человек. Атмосфера внутри корабля будет состоять из смеси азота с кислородом под давлением 0, 5—1, 0 кг/см2.
Проблема радиационной защиты экипажа в длительном космическом полете является одной из главных. Предполагают, что для полета к Марсу продолжительностью 330—420 суток, в начале 70-х годов в период спокойного Солнца потребуется примерно вчетверо меньший вес антирадиационной защиты, чем для полета длнтельностью 450—500 суток в наименее благоприятный период в 1980 г. Некоторыми из возможных решений этой проблемы являются аптирадиационные медикаменты, прогнозирование солнечной активности, специальная диета, повышающая сопротивляемость организма радиационным воздействиям, а также создание более эффективных и легких экранирующих материалов.
Согласно исследованиям, проведенным в Langley Research Center, весьма эффективным средством уменьшения начального веса системы для полета Земля—Марс—Земля, является использование аэродинамического торможения в атмосферах Марса и Земли. С учетом этого в Langley Research Center разрабатывается космический корабль с высоким аэродинамическим качеством. Эквивалентная нагрузка на крыло такова, что равновесная траектория планирования начинается на сверхзвуковой скорости.
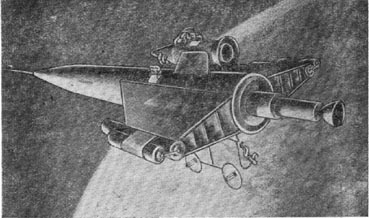
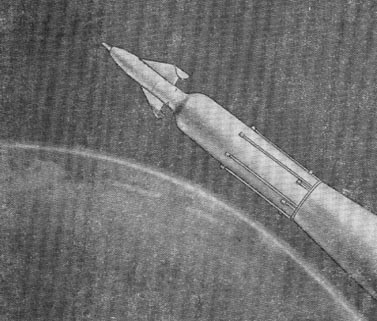
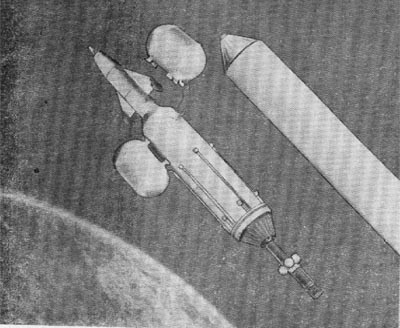
По одному из разрабатываемых проектов пилотируемого полета к Марсу космическая система со стартовым весом 400 т, снабженная ядерной ракетной силовой установкой весом 59 т, с удельным импульсом 820 сек, собирается на околоземной орбите с помощью четырех ракет-носителей «Saturn V». Одна ракета доставляет на орбиту ядерную силовую установку и полезную нагрузку, а три остальных—12 баков с топливом (рис. 3.14, 3.15)
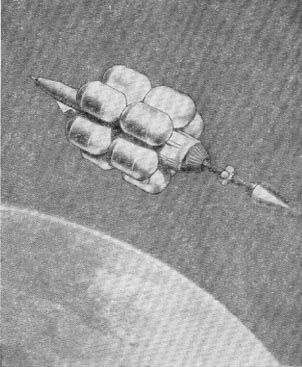
Космическая система в собранном виде, стартующая с околоземной орбиты к Марсу, показана на рис.3.16.
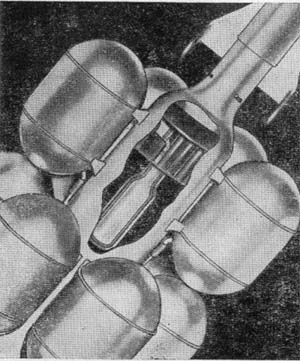
Для защиты от радиации кабина экипажа окружена вакуумированным пространством и погружена внутрь основного топливного бака с водородом. Кроме того, кабина покрыта слоем графита, что вместе со слоем водорода толщиной 2,4 м ограничивает дозу радиации, получаемую человеком в полете, менее, чем 100 р (рис.3.17). На рис.3.18 показана посадка космического корабля на Марс.
По контракту с NASA фирма Northrop разработала космический корабль горизонтальной посадки HL-10 (рис.3.19, 3.20)
Компоновочная схема HL-10 приведена на рис.3.19, общий вид модели HL-10—на рис 3.20. Опытный экземпляр HL-10 проходит летные испытания
Основные данные HL-10
Минимальный посадочный вес, кг....... 2000
Удельная нагрузка на крыю, кг/м2......120—250
Дозвуковое аэродинамическое качество ..... 4
Посадочная скорость при весе 2000 кг, кг/ч .......... 280
Идея создания космического корабля, обладающего хорошими аэродинамическими характеристиками при входе в атмосферу во всем диапазоне скоростей от космической до посадочной привела к разработке космического аппарата с разделением ступеней в процессе входа в атмосферу Космический корабль «Janus» состоит из контейнера полуконической формы, внутри которого находится самолет с треугольным крылом (рис. 3.21)
После входа в плотные слои атмосферы и торможения до дозвуковой скорости на высоте 15 км контейнер сбрасывается и приземляется на парашютах, а самолет производит посадку на аэродром.
Космический корабль «Janus» проектировался для двухнедельного полета по орбите вблизи Земли с экипажем из трех человек.
Внутренний объем контейнера герметизирован и заполнен воздухом под давлением 1 ат. Сообщение между самолетом и контейнером осуществляется через люки в днище фюзеляжа. В средней части контейнера расположены жилые помещения для экипажа. Шлюзы на задней стенке контейнера обеспечивают вход и выход экипажа перед стартом корабля и в полете по орбите.
При выборе аэродинамической формы контейнера, для обеспечения аэродинамического качества, динамической устойчивости и балансировки пришлось отказаться от идеальной полуконической формы. Угол конуса контейнера 24° был выбран из условия оптимального расположения центра тяжести, центра давления и обеспечения хорошей компоновки самолета в контейнере.
Для предотвращения перегрева фонаря кабины самолета при входе в атмосферу контейнер должен быть сбалансирован на положительные углы атаки. Балансировка осуществляется щитками, расположенными в хвостовой части контейнера.
Если расположить щитки в самой нижней части задней кромки, то при отклонении вниз возникает большой момент на пикирование и при небольших значениях аэродинамического качества приведет к выходу корабля на отрицательные углы атаки. Это можно исправить, придав носовой части контейнера форму санок, которая увеличивает аэродинамический момент на кабрирование.
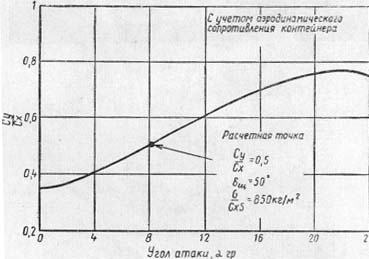
Выбранная форма корабля обеспечивает балансировку на гиперзвуковой скорости при значении аэродинамического качества 0,75; при балансировке на нулевом угле атаки гиперзвуковое аэродинамическое качество равно 0,35 (рис. 3.22).
Исследования показали, что при положении центра тяжести корабля на расстоянии 54% от носа контейнера запас статической устойчивости равен 12% на гиперзвуковом режиме и 5% на трансзвуковой скорости.
Используя изменение аэродинамического качества в диапазоне 0,35—0,75, за счет балансировки можно осуществить посадку корабля с недолетом 2200 км и перелетом 1500 км по отношению к расчетной точке посадки. Управление креном может обеспечить маневрирование в поперечной плоскости в пределах ±650 км. После сброса контейнера на дозвуковой скорости за счет маневренности самолета дальность полета увеличивается еще на 320 км во всех направлениях.
назад