| НОВОЕ В ЖИЗНИ, ТЕХНИКЕ | Серия «Космонавтика, астрономия» № 3, 1977 г. Издается ежемесячно с 1971 г. |
| 6Т6 И75 | И75 Иосифьян А. Г. Электромеханика в космосе. М., «Знание», 1977. 64 с. (Новое в жизни, науке, технике. Серия «Космонавтика, астрономия», 3. Издается ежемесячно с 1971 г.) Электромеханику, в общем смысле слова, можно определить как науку о законах движения вещественных инерциальных микро- и макротел, несущих электрические заряды и токи, при взаимодействии их с магнитными и электрическими полями. В то же время электромеханика является и отраслью техники, использующей электрическую энергию для производственной, научной и жизненной деятельности и неразрывно связанной с орудиями и средствами труда во всех областях народного хозяйства. В данной брошюре изложено одно из важных применений электромеханики - ее использование в космической технике. Она рассчитана на широкий круг читателей. 31904 © Издательство «Знание», 1977 г. |
Чувствительные элементы электромеханических систем
Электромеханические исполнительные органы
Электромеханическая система терморегулирования
Преобразование солнечной энергии в электрическую
Электромеханика космических стационарных аппаратов
Электромеханика самоходного аппарата «Луноход»
Электромеханика автоматической межпланетной станции «Викинг»
Космические астрономические обсерватории
Космическая электромеханика будущего
Электромеханика синтезированных летательных аппаратов
Общие перспективы развития космических электромеханических систем
Электромеханика — наука о движении и взаимодействии вещественных инерциальных макроскопических и микроскопических тел, связанных с электрическими и магнитными полями. Движение различных транспортных средств: автомобилей, теплоэлектровозов, самолетов на современном этапе развития в очень большой степени определяется законами и принципами электромеханики.
Ракеты-носители, используемые для вывода полезного груза на орбиту вокруг Земли и имеющие бортовые системы электромеханики, автоматики, электроснабжения, по своим законам движения не существенно отличаются от мощных авиационных сверхскоростных самолетов. Поэтому электротехническое оборудование таких ракет-носителей, в том числе средства электромеханики (электрические машины, аппараты, приборы), по своим весогабаритным, энергетическим характеристикам и техническим требованиям очень близки к авиационному оборудованию (в том числе по продолжительности непрерывной работы), с той лишь разницей, что перегрузки при ускорениях и вибрационные характеристики авиационных электромеханических систем при применении в ракетах-носителях имеют более широкий диапазон.
В отличие от этих систем работоспособность бортового электротехнического оборудования и систем космических аппаратов, выводимых на орбиту, может исчисляться многими месяцами и годами. Поэтому с точки зрения общего технического оснащения электрифицированных механизмов соответствующими электромеханическими устройствами (особенно в длительно действующих обитаемых космических кораблях) они больше подходят и гармонируют с техническими эксплуатационными требованиями морских судов, в том числе глубинных аппаратов. В то же время, совпадая по эксплуатационным характеристикам и общей структуре технического оснащения с объектами морского судостроения, космические объекты требуют значительно более жестких ограничений на вес и габариты всех электротехнических, электромеханических, радиоэлектронных и других электрифицированных бортовых систем.
Следует отметить следующие особенности электромеханических устройств космических аппаратов. Во-первых, в условиях орбитального полета возникновение любого движения каждого бортового рабочего механизма (большого или малого) воздействует в целом на космический объект в соответствии с законами сохранения центра масс и момента количества движения. Таким образом, при использовании электрической энергии для обеспечения движения любой массы в заданном направлении (поступательном или вращательном) реакция этого движения на корпус космического аппарата должна быть каким-то образом скомпенсирована. Это создает особые условия работы электромеханических систем, устанавливаемых на космические аппараты. Причем для каждого частного случая специфические особенности реакции на корпус имеют свою особую форму.
Во-вторых, любое электромеханическое устройство, выполняя полезную работу, несет соответствующие (в зависимости от величины КПД) тепловые потери. При работе механизмов в условиях глубокого вакуума отвод тепла в космическое пространство не может происходить с помощью каких-либо охлаждающих агентов и поэтому осуществляется лишь за счет излучения лучистой энергии в пространство, что вызывает необходимость при конструировании космических аппаратов использовать соответствующие поверхности (площади) для отвода тепла.
И наконец, в-третьих, так как космический аппарат должен находиться в космосе и функционировать долгие годы, то при эксплуатации электромеханических систем такого объекта требуется, чтобы они имели очень длительный срок службы и безотказно и непрерывно работали в динамическом режиме в течение десятков тысяч часов.
Космонавтика как наука о полетах летательных аппаратов в космическом пространстве тесно связана с астрономией и физикой, особенно с такими разделами последней, как механика, теплотехника, электротехника. Одновременно космонавтика, являясь и отраслью техники, изучающей вопросы конструирования космических летательных аппаратов (как пилотируемых космических кораблей, так и автоматических), тесно связана с такими отраслями электротехники, как электромеханика, радиотехника, электроника, светотехника, техника высоких напряжений, электроэнергетика с электрохимическими, плазменными, химическими и другими типами источников электрической энергии. Все эти разделы электротехники так или иначе связаны с космонавтикой, но один из них — электромеханика — более глубоко и неразрывно, чем остальные.
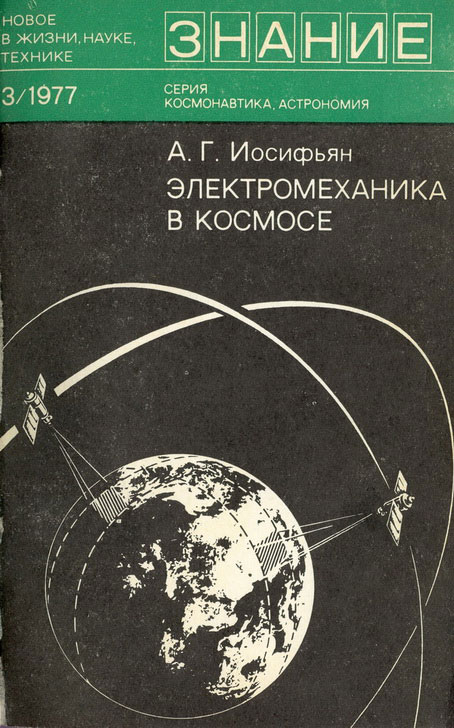
Не случайно основоположник теоретической космонавтики К. Э. Циолковский еще в 1898 г. предложил для дирижабля применить электроавтопилот. Последний можно считать прообразом всех электромеханических систем управления в таких современных летательных аппаратах, как самолеты, вертолеты, ракеты-носители. Автопилот К. Э. Циолковского (рис. 1) состоял из электрического генератора постоянного тока и маятникового автомата, который в зависимости от наклонения продольной оси гондолы осуществлял управление полетом с помощью переключателя в двигателе постоянного тока, связанном через механическую передачу с рулем высоты. В этой системе была предусмотрена и механическая обратная связь: наблюдая через окно, пилот мог регистрировать положение руля.
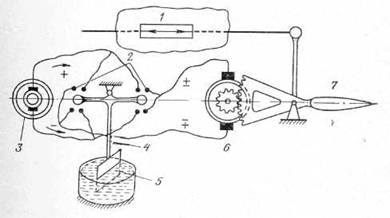 Рис. 1. Автопилот К. Э. Циолковского: 1 — окно; 2 — контакты; 3 — генератор; 4 — маятник; 5 — жидкостный демпфер; 6 — двигатель; 7 — руль высоты |
По мере развития летательных аппаратов и установления принципиальных особенностей динамики их движения электромеханические системы усовершенствовались. Они стали включать в себя механические приборы, исполнительные механизмы с электродвигателями, электронную, автоматическую аппаратуру, обеспечивающие задачи точной ориентации в пространстве, точной навигации и соответствующей стабилизации. В то же время конструктивно развивались сами системы управления летательных аппаратов, в которых все большее отражение находили принципы организации движения, имеющиеся в органическом мире. Известно, что все виды пернатых используют при своем движении сигналы . от световых источников — звезд, Солнца, планет — магнитного и электрического полей Земли. С помощью этих сигналов пернатые в условиях земной атмосферы могут пролететь десятки тысяч километров, используя внутренние чувствительные элементы своих органов, связанных с ориентацией и стабилизацией тела в пространстве, с точной навигацией в любых метеорологических условиях (не только при движении в заданном направлении, но и для приземления в заданном участке земного шара). Между тем современная теория и техника использования электричества и магнетизма для точной ориентации и навигации еще далеки от того совершенства управления движением в пространстве, которое имеет место в органической природе. Ведь пернатые, используя лишь ничтожную энергию и обладая очень малой мощностью, осуществляют сверхдальние перелеты, совершая при этом сложные виды движения в пространстве.
Для управления движением современных автоматизированных летательных аппаратов как близ земной поверхности, так и в космическом пространстве требуются наличие чувствительных элементов для регистрации положения аппарата в пространстве, выработка электрических сигналов и параметров, соответствующих этому положению, разработка логики управления на основе полученных многочисленных сигналов и, наконец, передача электрических сигналов на силовые управляющие исполнительные органы. В качестве исполнительных органов могут быть использованы электрические двигатели, электромагнитные механизмы, электрогидравлические приводы.
Особенности электромеханических систем, обеспечивающих вывод космического летательного аппарата на орбиту вокруг Земли и его движение по орбите, весьма наглядно проявляются при анализе движения самолетов (на различных этапах их развития). На первых летательных аппаратах пилот самолета совершал взлет, ориентируясь по взлетной дорожке. По наблюдению за горизонтом он осуществлял подъем или спуск, наклоняя или поднимая носовую часть аппарата вокруг его поперечной оси («управлял углом тангажа»). Используя различные виды ориентиров, наклонял самолет вправо или влево вокруг продольной оси аппарата («управлял углом крена»). И наконец, наблюдая за магнитной стрелкой или прибором курса, поворачивал самолет вокруг вертикальной оси («управлял углом рыскания»).
Таким образом, с помощью трех рулевых механизмов, действующих относительно трех взаимно перпендикулярных осей с точкой пересечения, расположенной в центре масс самолета, называемых обычно «строительными осями самолета» (продольной — по крену, поперечной — по тангажу, вертикальной — по рысканию), пилот мог ориентировать самолет в любом направлении. Исполнительными органами служили рулевые механизмы и рули. На первых самолетах пилот осуществлял управление рулевыми механизмами с помощью своей мускульной силы. Ориентируясь по показаниям приборов и собственным наблюдениям и используя исполнительные органы — рули, пилот организовывал, как говорят, «следящую систему», или «следящий привод». Эта «природная» система следила за отклонениями аппарата от нормального курса движения и при необходимости воздействовала на исполнительные органы, чтобы свести эти отклонения к минимальным значениям, обеспечивая движение самолета по заданному курсу. Вследствие инерциальности движения летательного аппарата управление им должно носить колебательный характер относительно заданного точного курса. Такой же колебательный характер движения от «курса» совершает автомобиль, управляемый водителем, который при движении даже по прямолинейной дороге все время воздействует на рулевую систему автомашины, направляя машину вправо или влево для сохранения основного направления движения.
Простейшие автопилоты с исполнительными органами по типу, предложенному К. Э. Циолковским для дирижабля, стали использовать только в 30-е годы нашего века. На следующем этапе — создания скоростных и сверхскоростных самолетов — разрабатываются автопилоты, которые обеспечивают не только автоматическое движение по заданной траектории, но и автоматический взлет, и так называемую «слепую» посадку. Электромеханические системы этих аппаратов уже имеют чувствительные приборы (датчики), которые регистрируют и передают в систему автоматического управления (с автопилотом) все основные данные, характеризующие реальное движение летательного аппарата.
На борту современных летательных аппаратов имеется группа датчиков, измеряющих ускорение, скорости в направлении всех трех собственных строительных осей аппарата. Эти датчики представляют собой электромеханические приборы — ньютонометры (акселерометры). Другую группу электромеханических датчиков составляют астродатчики, т. е. приборы, определяющие положение аппарата относительно звезд. Среди информационных чувствительных элементов (датчиков) имеются также приборы, измеряющие угловые ускорения движения по углам тангажа, рыскания и крена. Эти приборы основаны на принципе электромеханических гироскопов, о которых речь пойдет дальше. И наконец, на борту современных летательных аппаратов устанавливается электронная вычислительная машина (ЭВМ), которая, получая информацию от всех датчиков, вычисляет фактическую траекторию аппарата и сравнивает ее с идеальной траекторией, записанной в памяти ЭВМ. Определяя отклонения фактической траектории от расчетной, ЭВМ в результате логических операций вырабатывает соответствующие сигналы, которые подаются в исполнительные органы аппарата — рулевые механизмы, электрические реле и автоматы, регулирующие работу авиадвигателей и обеспечивающие тем самым минимальное отклонение параметров реальной траектории от идеальной.
В ракете-носителе автоматизированы взлет, выход на орбиту по заданной траектории, отделение спутника. Автоматизированы также процессы ориентации и стабилизации при движении космического летательного аппарата по заданной траектории и, наконец, посадка на планету и взлет с нее. Можно сказать, что ракета-носитель, как и любой космический летательный аппарат, является своеобразным мощным «силовым роботом». И не случайно в 1974 г. на VI симпозиуме Международной федерации по автоматическому управлению в космическом пространстве, кроме докладов, посвященных ракетам-носителям, спутникам, телескопам для внеатмосферной астрономии, было представлено большое количество докладов по роботам и манипуляторам.
Анализ систем управления роботами и манипуляторами как объектами, произвольно двигающимися в пространстве, показал, что эти системы имеют много общего с аналогичными системами космических летательных аппаратов. Особенно это касается приборов и систем наблюдения и информации, электрических схем управления ориентацией и стабилизацией, следящих исполнительных механизмов. Для того чтобы ракета-носитель двигалась автоматически по определенной трассе, а в момент отделения от нее искусственного спутника Земли имела заданную по величине и направлению скорость, на ней устанавливается прибор, в котором заложена программа движения. Прибор, сохраняя свое положение в пространстве, определяет фактическое положение ракеты-носителя, регистрирует любое отклонение ее движения от заданного с помощью электрических сигналов, по которым осуществляется рулевое управление космического летательного аппарата. Такой сложный прибор называется электромеханической стабилизированной платформой (или инерциальной платформой). На рис. 2 представлена схема такой (платформы. На ней установлены: ньютонометры для измерения ускорений (по трем осям координат); приборы, определяющие скорости, приобретенные с момента взлета, а также траекторию, определенную по этим скоростям (при наличии точных часов); и, наконец, приборы, которые сравнивают эту фактическую траекторию с программной, заложенной в памяти автомата. Автомат может быть электромеханическим и в виде управляющей ЭВМ. Сигналы отклонения привадят в действие соответствующие автоматы стабилизации и ориентации, которые воздействуют как на ракетные основные, так и на рулевые двигатели таким образом, чтобы как можно быстрее ликвидировать эти отклонения.
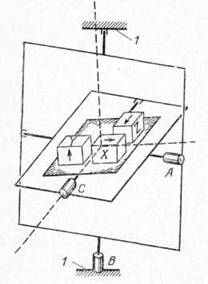 Рис. 2. Схема стабилизированной платформы: 1 — корпус; ABC — датчики с моментными электродвигателями; XYZ — приборы-датчики стабилизации по трем осям |
Рулевые органы ракеты-носителя снабжены электромеханическими и электрогидравлическими приводами и соответствующими электромагнитными механизмами, обеспечивающими передачу электрических сигналов от датчиков.
Перейдем теперь к основным динамическим процессам, сопровождающим отделение космического летательного аппарата1 от ракеты-носителя, а именно — к ориентации и стабилизации и дальнейшему функционированию аппарата как в свободном полете, так и при корректировании траектории орбиты, необходимом для дальнейшего движения в соответствии с программой полета.
1Здесь и далее мы под космическим летательным аппаратом будем понимать полезный груз ракеты-носителя.
После вывода на орбиту космического летательного аппарата и отключения двигателей последней ступени ракеты-носителя программное устройство (электромеханический часовой механизм или ЭВМ), находящееся в этой ступени, подает сигнал в электропиротехническое устройство, которое отталкивает космический аппарат от ракеты-носителя.
Следовательно, после отделения от последней ступени ракеты-носителя космический летательный аппарат представляет собой тело, центр масс которого движется вдоль круговой, эллиптической или другой траектории. Космический аппарат в целом может вращаться с определенной угловой скоростью относительно мгновенной оси, проходящей через его центр масс. Происходит это потому, что механические силы, отделяющие космический летательный аппарат от ракеты-носителя, в момент отделения не являются одинаковыми. Вследствие этого возникают вращательные моменты относительно центра масс, и под действием этих вращательных импульсных моментов аппарат приобретает мгновенную угловую скорость относительно некоторой оси.
Возможность аппарата занимать любое положение в пространстве при движении его центра масс по некоторой космической траектории и определяет законы управления автономными электромеханическими системами в зависимости от назначения космического аппарата.
Пусть, например, космический летательный аппарат предназначен для фотографирования поверхности облачного и ледового покровов Земли. Эта задача выполняется космической метеорологической системой, функциональная схема которой представлена на рис. 3. Всю фотоинформацию система должна закодировать в форме электрических сигналов, запомнить их и затем передать на Землю, где эту телефотоинформацию должна принять наземная радиостанция. Для расшифровки, а главное, для обеспечения географической привязки I получаемой информации к местности при дальнейшей обработке необходимы ориентация и стабилизация фотоаппаратуры относительно некоторой оси, проходящей все время через центр масс той или иной планеты (в частности, Земли). Это направление будет перпендикулярно к поверхности планеты и тем самым по периоду вращения можно будет привязать полученную фотографию изображения к местности.
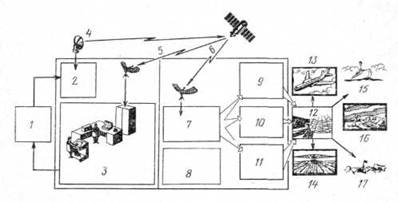 Рис. 3. Функциональная схема космической метеорологической системы: 1 — пункт управления; 2 — наземная аппаратура командной радиолинии; 3 — пункт автоматической обработки телеметрической информации; 4 — командная радиолиния; 5 — телеметрическая информация; 6 — радиолиния метеорологической информации; 7— аппаратура преобразования метеорологической информации; 8 — пункты приема метеорологической информации; 9 — обработка телевизионной информации; 10 — обработка актинометрической информации; 11 — обработка инфракрасной информации; 12 — Гидрометеоцентр СССР. Выпуск прогнозов: 13 — для авиации; 14 — для сельского хозяйства; 15 — для кораблей морского флота; 16 — для населения об опасных явлениях погоды; 17 — о состоянии ледяного покрова |
Из этого примера следует, что функции систем управления любого космического аппарата сводятся к тому, чтобы, во-первых, обеспечить начальное «успокоение» аппарата после его отделения от ракеты-носителя (т. е. чтобы свести к минимуму угловую скорость вращения, полученную им в момент отделения), и, во-вторых, обеспечить соответствующие программные повороты вокруг трех взаимно ортогональных строительных осей, жестко связанных с центром масс космического летательного аппарата. Система управления должна, кроме того, иметь возможность осуществлять поиск специальных ориентиров (Земли, Луны, Солнца, планет Солнечной системы, звезд) и обеспечивать стабилизацию космического аппарата относительно этих ориентиров с точностью, необходимой для работы бортовых аппаратов и научных приборов. В функцию системы управления также входит стабилизация космического летательного аппарата по заданному курсу и автоматическое управление реактивными двигателями для изменения траектории центра масс и маневрирования кораблем.
Большинство искусственных спутников Земли, а также космические аппараты, предназначенные для полетов на
Луну, Марс, Венеру и другие планеты, являются длительно действующими летательными аппаратами. К ним относятся, в частности, спутники связи, спутники исследования природных ресурсов Земли, метеорологические, такие, как советские «Молния», «Радуга», «Метеор», американские «Нимбус», НОАА. Все они имеют электромеханические системы для выполнения тех или иных физических операций при орбитальном полете. Общие принципы этих устройств носят типовой характер, отличаясь лишь различными конструктивными модификациями.
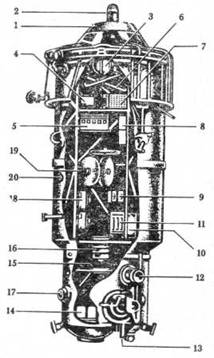 1 — электропривод ориентации солнечной батареи; 2 — оптико-электромеханический астродатчик; 3 — электропневмоклапаны газореактивной системы; 4 — электромеханические коммутаторы телесигнализации; 5 — электромеханические лентопротяжные устройства памяти; 6 — электромагниты для сброса кинетических моментов; 7 — релейно-контакторная аппаратура; 8 — электромашинный преобразователь; 9— датчики угловых скоростей; 10 — устройство записи воспроизведения; 11 — шаговые электродвигатели; 12 — сканирующий оптико-электромеханический блок инфракрасной аппаратуры; 13 — электромеханический построитель местной вертикали; 14 — сканирующая телевизионная аппаратура; 15 — электропривод системы терморегулирования; 16 — электродвигатели-вентиляторы; 17 — электромеханическая спектрометрическая аппаратура; 18 — гироскопический датчик курса; 19 — электродвигатели-маховики; 20 — электрореактивный двигатель системы коррекции |
На рис. 4 представлен комплекс электромеханических устройств на таком типовом космическом аппарате, которые обеспечивают выполнение различных функциональных программ в условиях космического полета. Для электроэнергетического снабжения комплекс имеет солнечную батарею, буферную химическую батарею, автоматы, обеспечивающие подзарядку и разрядку аккумуляторов, или батарею с изотопным источником энергии. Для ориентации и стабилизации в комплексе применяются оптико-механические астродатчики, электромеханические построители местной вертикали, электромеханические датчики угловых скоростей, силовые управляющие исполнительные органы (газореактивные системы или электрореактивные двигатели с автоматикой управления, электродвигатели-маховики, электромагниты для внешнего управления угловыми поворотами космических летательных аппаратов. Кроме того, в комплекс входят различного рода электрические двигатели, в частности сканирующие (в научной аппаратуре), и специальные электродвигатели в аппаратуре терморегулирования, а также автомат (или ЭВМ) управления объектом в целом (по заданной программе эксплуатации) со всеми необходимыми внешними устройствами, обеспечивающими выполнение программы полета. Таким образом, электромеханические системы, будучи достаточно обширными, определяют структуру и принципы динамики движения космического аппарата в зависимости от его назначения.
Принцип действия (см. рис. 4) электромеханических систем типового космического аппарата заключается в следующем. После отделения от последней ступени ракеты-носителя аппарат получает некоторую угловую скорость вращения. Датчики угловых скоростей по строительным осям 9 регистрируют эти скорости и с помощью автоматики и электроклапанов газореактивной системы 3 ориентирует и стабилизируют объект. Последующая его ориентация и стабилизация обеспечиваются электромеханическим построителем местной вертикали 13 и гироскопическим датчиком курса 18, которые вырабатывают сигналы, поступающие на автоматическую систему, газореактивные двигатели и электромагниты для сброса кинетических моментов 6 или электродвигатели-маховики 19. Оптико-электромеханический астродатчик 2 затем корректирует ориентацию космического аппарата в пространстве с помощью электрореактивных двигателей системы коррекции 20. При этом постоянно ориентированные солнечные батареи 1 с соответствующей аккумуляторной батареей обеспечивают электроэнергией космический аппарат в целом, в том числе инфракрасную аппаратуру 12, электропривод системы терморегулирования 15 и электродвигатели-вентиляторы 16.
Развитие многочисленных функциональных областей применения электромеханических систем для космических летательных аппаратов с первых дней освоения космического пространства сопровождалось интенсивными научно-исследовательскими и опытно-конструкторскими работами как в условиях наземных испытаний отдельных электрических машин, приборов и различных систем для космических аппаратов, так и особенно их отработки в космических условиях орбитального полета. При этом элементы электромеханических систем во время орбитального полета снабжались соответствующими датчиками, характеризующими их работоспособность на орбите (показатели датчиков регистрировались с помощью телеметрии).
На рис. 5 представлена структурно-функциональная схема спутников «Космос-14» и «Космос-23», а на рис. 6 — внешний вид спутников с указанием пространственного положения отдельных приборов и аппаратов. «Космос-14» имел очень широкую возможность ориентации и стабилизации в пространстве. На нем была установлена трехосная система ориентации и стабилизации, которая позволяла ориентировать данный космический летательный аппарат и с помощью теплового пеленгатора (построителя местной вертикали) и одновременно на Солнце при применении соответствующих датчиков. В полете был исследован режим «закрутки» всего спутника вместе с раскрытыми солнечными батареями вокруг оси, ориентированной на Солнце с помощью электродвигателей-маховиков. При этом солнечные батареи были жестко закреплены относительно корпуса спутника.
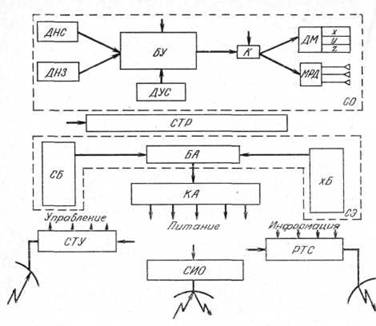 Рис. 5. Структурно-функциональная схема спутников «Космос-14» и «Космос-23»: СО — система ориентации; ДНС — датчик направления на Солнце; ДНЗ — датчик направления на Землю; ДУС — датчик угловой скорости; БУ — блок управления; К — переключатель; ДМ — двигатели-маховики; МРД — микрореактивные двигатели; СЭ — система энергопитания; СБ — солнечные батареи; БА — блок автоматики; хБ — химическая батарея; СТУ — система телеуправления; СИО — система измерения орбиты; РТС — радиотелеметрическая система; СТР — система терморегулирования; КА — коммутационный автомат |
На «Космосе-23» проверялись оптимальные законы управления, исследовались динамические характеристики, т. е. регистрировались и передавались на Землю по телеметрии параметры угловых поворотов в функции времени.
Исследование этих экспериментальных закономерностей в орбитальном полете дало возможность оценить отдельные компоненты сопротивления окружающей среды при движении спутника. Было установлено, что из всех внешних возмущающих сил: аэродинамических, гравитационных, светового давления, воздействия метеорной пыли, магнитных и плазменных воздействий наибольшее значение имеют силы аэродинамические и гравитационные. Кроме того, оказалось, что электрические машины с относительно большой массой ротора в условиях невесомости работают более надежно, чем на Земле. Это подтвердилось на последующих спутниках, снабженных электрическими двигателями довольно больших размеров, а именно на спутниках «Молния» и «Метеор».
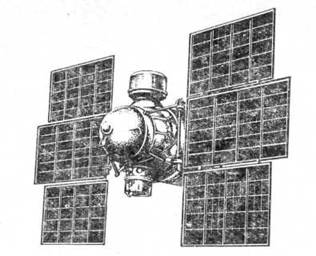 Рис. 6. Общий вид искусственных спутников Земли «Космос-14» и «Космос-23» |
При исследовании характеристик солнечных батарей на «Космосе-23» были (получены очень важные данные о «старении» фотоэлементов, которые на первых спутниках при длительной работе изменяли свои характеристики и в особенности при многократных резких изменениях температуры (тепловых ударах), возникающих, когда спутник и поверхности его солнечных батарей переходят от освещенной Солнцем части в тень Земли.
Этот переход, сопровождаемый резкими колебаниями температуры, отрицательно сказывался на механической прочности пластинок кремниевых фотоэлементов, а также прочности их механического крепления к панелям солнечных батарей.
Проведенные в последующие годы фундаментальные исследования по созданию надежно работающих в космосе солнечных батарей показали, что новые типы фотоэлементов и новые типы солнечных панелей могут функционировать на орбите непрерывно и безотказно не только в течение нескольких месяцев, но и в течение нескольких лет.
Система электропитания на спутниках создается с помощью аккумуляторной батареи, подключенной через релейно-контакторный аппарат и соответствующую кабельную систему к солнечной батарее. Так как поступление энергии от солнечной батареи не является непрерывным и по мере захода космического аппарата в тень Земли и выхода из нее процесс подзарядки то возникает, то исчезает, в системе электропитания установлен специальный автомат, исключающий возможность перезарядки батареи и тем самым вывода ее из строя или недозарядки, при которой можно лишиться необходимого количества энергии. Рассмотренная система электропитания в известной мере напоминает систему электроэнергетического снабжения автомобиля, в котором буферная аккумуляторная батарея подключена к заряжающему ее генератору через соответствующий аппарат, выполняющий аналогичную функцию. Однако для космического аппарата система автомата зарядки и разрядки является гораздо более сложной, так как рассчитана на движение спутника по орбите с периодическим чередованием теневых и солнечных участков.
При рассмотрении конструкции и динамики движения типового спутника мы упомянули проведенные эксперименты по «закрутке» космического летательного аппарата «Космос-14» вокруг своей оси, по превращению его в своего рода силовой гироскоп, ориентированный на Солнце. Используя этот принцип для создания спутника связи «Молния», советские конструкторы для обеспечения солнечной батареи энергией Солнца установили на спутнике «Молния-1», электродвигатель-маховик с большим моментом инерции ротора, соизмеримым с моментом инерции аппарата в целом. При ориентации спутника по двум осям на Солнце с помощью солнечных датчиков и газореактивной системы так, чтобы ось двигателя-маховика проходила через центр масс Солнца, можно было путем включения электродвигателя создать «силовой гироскоп» с осью вращения ротора, направленной на Солнце.
На рис. 7 представлена схема управления спутником за один цикл эллиптического движения его вокруг Земли. Из него видно, что над освещенным Солнцем полушарием Земли спутник с помощью электромеханического силового гироскопа сохраняет свое направление в пространстве. Для того чтобы обеспечить работу аппаратуры радиосвязи, на спутнике «Молния» установлены следящие системы, которые направляют антенны на заданный район и тем самым обеспечивают прием и передачу информации. При этом силовой электромеханический двигатель-гироскоп используется также для программного поворота системы путем изменения угловой скорости ротора двигателя, т. е. как двигатель-маховик, о чем подробнее будет сказано дальше.
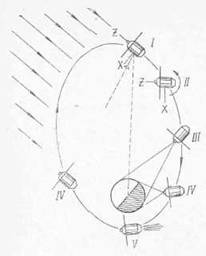 Рис. 7. Схема управления спутником «Молния-1» (стрелками слева вверху указано направление солнечных лучей): I — V — положение спутника на орбите; X — поперечная ось аппарата; Z — продольная ось аппарата, ось вращения электромеханического силового гироскопа |
Космические летательные аппараты «Венера», «Марс», «Луна», предназначенные для выхода на орбиту планет Солнечной системы и для спуска на их поверхности, по существу, обладают и свойствами ракеты-носителя. Таким образом, эти аппараты должны иметь всю типовую электромеханическую структуру (см. рис. 4) и все основные приборы и двигатели, свойственные ракете-носителю. Особое место в этих аппаратах занимают системы радиосвязи, обеспечивающие точное определение пространственных координат движения, управление объектом и поддержание непрерывной связи с аппаратом на всем этапе его движения и посадки или возвращения на Землю.
В бортовое оборудование космических аппаратов, кроме электромеханических систем ориентации, энергоснабжения, терморегулирования, входят другие электромеханические устройства. К этим устройствам относятся электромеханические лентопротяжные механизмы, применяемые в системах памяти ЭВМ, в запоминающих устройствах или фотометрических приборах. Очень важное значение имеют электромеханические синхронизированные двигатели или также используемые механизмы для сканирующих узлов телефотометрических аппаратов. Так как сканирующие приборы вращают узлы оптической системы в разные стороны поперек движения спутника по орбите, последовательно просматривая участок за участком в заданной полосе обзора, то от точности движения ротора электродвигателя или движения механизма зависят качество и разрешающая способность оптической аппаратуры.
Период сканирования, т. е. период колебательного механического движения зеркала поперек трассы, носит довольно сложный характер и требует прецизионных электронных систем регулирования движения ротора (соответствующего механизма) для обеспечения нужной закономерности при ходе зеркала вперед (когда снимается фотоизображение) и при ходе назад (когда фотоаппаратура не функционирует). В таких телефотометрических системах применяется бортовое и наземное единое время с помощью синхронной записи на магнитную ленту меток времени наряду с записью телефотоизображения. Это делается для того, чтобы на Земле получить соответствующее синхронное изображение поверхности с помощью воспроизведения синхронизирующим электрическим двигателем (преобразователем) движения пленки, на которой имеется зарегистрированное на борту спутника изображение. Таким образом, орбитальная бортовая электромеханическая система спутника должна неразрывно быть связана по времени с электромеханическими системами на Земле.
К наземному оборудованию предъявляются жесткие требования относительно синхронного и синфазного движения с движением орбитальных электродвигателей. Эта синхронность и синфазность обеспечивается системой радиопередатчиков и радиоприемников, которые, в свою очередь, могут вносить помехи и искажения в передаваемую информацию. Такая единая электромеханическая система регистрации изображения во времени (см. рис. 3) имеет исключительно важное значение для привязки изображения к географической местности и для опознания образов, характеризующих состояние посевов, ход уборки урожая, созревание сельскохозяйственных культур, а также для регистрации лесных пожаров, движения косяков рыб и т. д.
Сложные электромеханические устройства, связанные с движением роторов электродвигателей, якорей электромагнитов и реле, электронная техника как в виде отдельных блоков, так и встроенных в корпусы электрических машин и аппаратов — все это требует тщательных контрольных испытаний, гарантирующих полную уверенность в нормальной работе спутника на орбите. Наряду с исследованием отдельных электромеханических систем также должны быть испытаны функциональные связи различных систем, входящих в состав спутников.
В наземных испытаниях следует подвергать тщательному анализу все причины, вызывающие те или иные отклонения при движении аппарата (в стационарных и нестационарных режимах работы электродвигателя и аппаратуры). Иногда для этого требуется многократно дублировать наиболее важную и непрерывно действующую аппаратуру. Все электрические механизмы перед установкой на спутниках проверяются, в частности, в условиях транспортировки, условиях перегрузок при выводе на орбиту, условиях изменения в широких диапазонах значений окружающей температуры, питающего напряжения. В каждом таком режиме проверяется точность функциональной характеристики аппаратуры. В наземных условиях создаются условия глубокого вакуума, низких температур, где в окончательной форме проявляется работоспособность всей аппаратуры. Для проведения наземных испытаний отдельных элементов и электромеханических систем космического аппарата в целом большое значение имеет использование ЭВМ.
Чувствительные элементы электромеханических систем. Информационные приборы электромеханической системы управления дают возможность сориентировать космический объект при его движении в пределах космического пространства. Процесс ориентации в этом случае физически не отличается от ориентации под водой, на воде, в воздухе или на суше. Роль чувствительных элементов в этом процессе сводится к регистрации местоположения космического летательного аппарата, производимой специальным измерительным органом, и указанию его расположения относительно выбранных базовых направлений.
К чувствительным элементам относятся: астродатчики, пеленгаторы теплового поля Земли (так называемые построители местной вертикали), электромеханические гироскопы различных назначений, ньютонометры, приборы измерения гравитационного поля.
Астродатчики. Астродатчик представляет собой миниатюрный оптический телескоп с автоматической электромеханической системой наведения, использующей фотоэлементы, расположенные внутри телескопа. Во время движения спутника по орбите астродатчик сохраняет в поле зрения мини-телескопа изображение Солнца или заданной звезды, т. е. пеленгует небесные светила. В процессе пеленгации специальные электрические приборы, расположенные на осях мини-телескопа, регистрируют угловые координаты продольной оси телескопа относительно осей космического летательного аппарата и передают их в систему управления.
Построитель местной вертикали. Построитель местной вертикали пеленгует центр масс планеты (Земли). Пеленгация может осуществляться или с помощью гравитационного маятника, сохраняющего направление, связывающее центр масс спутника с центром масс планеты, или с помощью пеленгации теплового поля планеты. Чаще всего используется электромеханическая система пеленгации теплового поля Земли (или другой планеты).
Тепловой пеленгатор Земли представляет собой своеобразный телескоп (рис. 8), принимающий не видимые, а инфракрасные, т. е. тепловые, лучи и жестко связанный со строительными осями космического аппарата. Сигналы для пеленгации даются с помощью оптической системы, включающей электрический двигатель с зеркалом, вращающимся на его оси, и промежуточную систему зеркал, передающих сигналы на болометр-термоэлемент, воспринимающий тепловые сигналы Земли или другой планеты.
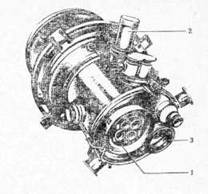 Рис. 8. Приборный узел построителя местной вертикали: 1 — телевизионные датчики; 2 — инфракрасный датчик; 3 — датчик построителя местной вертикали |
По изменению интенсивности теплового излучения планеты, воспринимаемого при вращении зеркала, оптическая система с болометром позволяет определять граничный контур планеты в космосе и по этой границе осуществляет пеленгацию. По величине получаемой болометром энергии излучения автоматически (с помощью электронной аппаратуры) определяются угловые отклонения осей космического аппарата от запеленгованного направления, проходящего через центр планеты. Эти отклонения в виде электрических сигналов передаются в систему управления космического летательного аппарата, и с помощью силовых органов управления космический летательный аппарат ориентируется относительно двух осей — оси крена и оси тангажа. Благодаря этому создается следящая система, обеспечивающая ориентацию космического летательного аппарата относительно оси, проходящей через центр масс планеты.
Таковы принципы действия чувствительных приборов для «видимых» ориентиров, спектральные свойства и интенсивность которых могут быть зарегистрированы чувствительными элементами.
Электромеханические гироскопы различных назначений. Электромеханические гироскопы применяются в. качестве силовых стабилизаторов, датчиков угловых скоростей, ускорений, а также в качестве датчиков курса, называемых обычно гироорбитантами. Рассмотрим общие свойства электромеханических гироскопов.
Электромеханический гироскоп представляет собой электрический двигатель с ротором, обладающим большим моментом инерции и выполненным в виде маховика. Чтобы обеспечить большую маховую массу ротора, последний конструируют как внешнюю часть электродвигателя. Ротор гироскопа не имеет выходного устройства вала, так как, вращаясь в подшипниках, он работает только на разгон своей массы или на ее торможение. Статор электродвигателя при питании постоянным током имеет систему полюсов машины постоянного тока со щеткодержателями. При питании переменным током статор двигателя-гироскопа является статором обычного двух- или трехфазного электродвигателя.
Рассмотрим некоторые электромеханические характеристики гироскопа на постоянном токе, физически более простые при анализе работы электродвигателей-маховиков для систем ориентации космического летательного аппарата.
Непосредственно после включения такого двигателя в сеть начинается период разгона ротора, в течение которого двигатель потребляет большой ток и развивает большой момент вращения, обеспечивающий этот разгон. По мере разгона ротора и возникновения в его обмотках электродвижущей силы обратного направления, ток при постоянно приложенном напряжении автоматически уменьшается (вместе с моментом вращения) до ничтожной величины, достаточной только для преодоления трения в подшипниках и побочных потерь. При работе ротора гироскопа в глубоком вакууме энергия, подводимая к двигателю, расходуется только на потери в подшипниках и электромагнитные потери в статоре и роторе. В течение последних лет повсеместно в электромеханических гироскопах коллекторные машины постоянного тока были заменены двигателями переменного тока повышенной частоты2. Возникающее при этом вращающееся поле разгоняет ротор до допустимого по прочности конструкции числа оборотов, исчисляемого обычно десятками тысяч в минуту.
2 Из-за осложнений, связанных с применением коллектора.
Такое устройство с постоянно вращающимся ротором обладает весьма интересными свойствами. Если, например, держать корпус такой машины двумя руками, расположив ось вращения перпендикулярно к туловищу, и поворачивать корпус вокруг собственной оси вращения, то руки экспериментатора никакой внешней силы чувствовать не будут, кроме сил тяжести и ничтожных сил, вызываемых трением в подшипниках (а в условиях невесомости и сила тяжести не будет ощущаться). Если теперь попытаться повернуть корпус электродвигателя на себя или от себя, т. е. вокруг оси, перпендикулярной к собственной оси вращения, то мускулы рук в соответствии с законами механики будут ощущать достаточно большую силу, направление которой будет несколько неожиданным: оно не будет совпадать с направлением, по которому была сделана попытка повернуть ось гироскопа. Электродвигатель-гироскоп будет создавать такой момент вращения, при котором направление собственной оси ротора совпало бы с направлением оси, вокруг которой экспериментатор пытается повернуть корпус на себя или от себя. Такой гироскоп (рис. 9) называется моментным электрогироскопом и используется, как будет показано в дальнейшем, для поворота корпуса искусственного спутника Земли вокруг своих строительных осей.
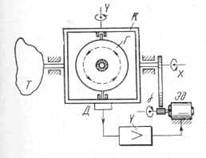 Рис. 9. Схема силового моментного электрогироскопа: Т — корпус аппарата; Эд — моментный электродвигатель; j — передаточное число редуктора; У — ускоритель; Д — датчик; К — корпус электрогироскопа: Г — гироскоп; Y —ось поворота гироскопа; X — ось вращения корпуса |
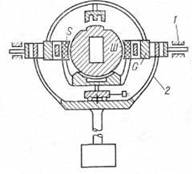 Рис. 10. Схема шарового электродвигателя: Ш — шаровой ротор; S — обмотка статора; G — внутреннее карданное кольцо; 1 — корпус; 2 — внешнее карданное кольцо |
Таким образом, силовые процессы поворота зависят от начального пространственного расположения вращающегося ротора. Если ось вращения такого гироскопа направить в данном месте земного шара строго вдоль оси вращения Земли, то она все время будет сохранять свое направление. Если ось фигуры гироскопа случайно не направлена вдоль оси вращения земного шара, то силы, возникающие вследствие вращения Земли, будут ориентировать гироскоп так, чтобы направление оси вращения совпало бы с направлением оси вращения Земли. А это значит, что такой гироскоп будет принимать участие во вращении Земли в системе «неподвижных звезд» и тем самым указывать на вращение Земли вокруг своей оси.
Электромеханические гироскопы в форме шарового электродвигателя (рис. 10) широко применяются на морских судах в качестве измерительных приборов для регистрации бортовой и килевой качки корабля. Ротор такого электродвигателя представляет собой металлический шар с большой инерциальной массой, статор — кольцо, опоясывающее шар, с двух- или трехфазной обмоткой в электрической машине переменного тока. Ротор-шар вращается вокруг оси, перпендикулярной плоскости кольца (без подшипников), будучи подвешен на струе газа или с помощью электрического или магнитного подвеса. Работа подвеса обеспечивается системой автоматического регулирования зазора между ротором, статором и подставкой. Предварительно электрически разогнав шар относительно оси, проходящей через определенную звезду, можно получить Направленный волчок, сохраняющий направление в соответствии с законом сохранения кинетического момента ротора шарового электродвигателя. Соответствующая электромагнитная или оптическая система в виде датчиков, расположенных «а шаре, определяет направление и отклонения оси вращения шара относительно статора электродвигателя, жестко закрепленного в корпусе корабля. Такое электромеханическое устройство называется шаровым гироскопическим датчиком.
Гироскопы как измерительные чувствительные элементы в системах автоматического управления могут быть не только электромеханическими, но и вибрационными, жидкостными, ядерно-корпускулярными, лазерными. Все они основаны на принципе сохранения микромоментов количества движения относительно «неподвижных» звезд.
Электромеханический датчик угловых скоростей. Датчик угловой скорости предназначен для измерения угловой скорости объекта по осям крена, тангажа и рыскания и соответствующей выдачи сигналов, пропорциональных измеренной угловой скорости, в блок управления. В качестве таких датчиков используется электродвигатель-гироскоп с двумя степенями свободы и усилителем обратной связи. Принцип действия их основан на свойствах двухстепенного гироскопа.
На рис. 11 дана принципиальная схема двухстепенного электромеханического гироскопа. Электродвигатель-гироскоп укреплен в рамке, способной качаться вокруг оси, перпендикулярной оси вращения ротора гироскопа (ось OY). Ось качания рамки расположена в подшипниках, неподвижно закрепленных в корпусе космического аппарата. Если корпус космического аппарата, а с ним и весь гироскоп вращать относительно оси ОХ, то возникнет гироскопический момент, который начнет поворачивать рамку с ротором как целое вокруг этой оси OY, пытаясь совместить ось вращения ротора с осью ОХ. Конструктивно рамка может быть связана с корпусом аппарата с помощью гибкой пружины и демпфера или же с помощью мини-электрической машины со свойствами «пружины и демпфера». В соответствии с законами механики рамка должна повернуться на небольшой угол, пропорциональный угловой скорости корпуса космического аппарата относительно этой оси.
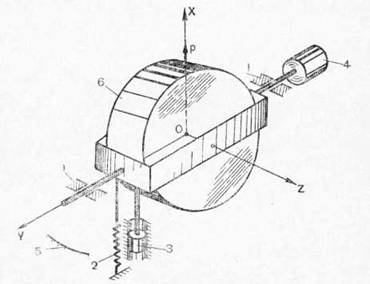 Рис. 11. Схема двухстепенного гироскопа — датчика угловых скоростей: 1 — подшипник оси рамки гироскопа; 2 — упругая связь; 3 — демпфер; 4 — моментный датчик; 5 — измерительное устройство; 6 — гироскоп |
Электрический измерительный прибор, связанный с этой осью, измеряет угловую скорость космического аппарата и передает эти данные в систему управления. Если расположить по каждой строительной оси космического летательного аппарата соответствующие датчики угловых скоростей, то они будут определять все три проекции мгновенной угловой скорости вращения относительно оси, проходящей через центр масс. Передача этих данных в систему управления необходима для обеспечения устойчивости как в процессах управления космическим летательным аппаратом, так и в период начального успокоения аппарата после отделения от ракеты-носителя.
Электромеханический датчик курса (гироорбитант). Раньше уже говорилось, что с помощью специального прибора — построителя местной вертикали — космический летательный аппарат при движении по замкнутой траектории может ориентироваться относительно оси, совпадающей с направлением, соединяющим центры масс космического летательного аппарата и планеты. При этом космический аппарат оказывается ориентированным относительно двух осей координат — оси крена и оси тангажа (а вокруг третьей, оси рыскания, он может вращаться).
Для ориентации космического летательного аппарата относительно всех трех осей в дополнение к построителю местной вертикали используется электрогироскопический прибор — гироорбитант. Он служит для определения угла отклонения космического летательного аппарата от заданного курса вдоль траектории по углу рыскания. Этот прибор представляет собой электродвигатель-гироскоп с тремя степенями свободы, подвешенный в карданном подвесе. Внутренним кольцом карданного подвеса является корпус гироскопа, закрепленный своими цапфами в подшипниках внешнего карданного кольца. На осях внутреннего и внешнего карданных колец установлены электрические датчики углов и моментов. Датчики углов состоят из электромагнитных измерителей угла, датчики моментов — из миниэлектрических машин. С помощью совместной работы этих датчиков определяются отклонения космического летательного аппарата по углу рыскания и затем эти данные передаются в систему управления для обеспечения полной трехосной ориентации космического летательного аппарата.
Электромеханические измерители ускорений. Простейшим конструктивным типом измерителя ускорений является прибор, в котором свободно движется масса с помощью пружин, сжимающихся и растягивающихся при ускорениях. Располагая в корпусе электромагнитный измерительный элемент, регистрирующий перемещение массы, можно определять линейные ускорения по всем трем осям.
Электромеханические исполнительные органы. Исполнительные органы, которые используются в системах управления, ориентации, стабилизации, слежения, а также при программных поворотах и разрядке маховиков с электромеханической точки зрения можно разбить на четыре типа: газореактивные — электрогазореактивные; электромагнитные, взаимодействующие с магнитным полем Земли («космические моментные электродвигатели»); электродвигатели-маховики и моментные электрогироскопы.
Газореактивные исполнительные органы. Эти исполнительные органы, отбрасывая холодный или горячий газ через сопло в космическое пространство, создают силу, воздействующую на аппарат. Получаемая при этом тяга (сила) прямо пропорциональна скорости истечения газа и секундному расходу отбрасываемой массы и направлена против скорости. Если ось сопла конструктивно расположить так, чтобы она не проходила через центр масс космического летательного аппарата, то при этом возникает момент вращения, с помощью которого и осуществляется поворот корпуса космического летательного аппарата в пространстве.
Весовые затраты рабочего газа пропорциональны удельному импульсу. Поскольку запасы рабочего газа на борту космического летательного аппарата ограничены и не восполняются, то для длительного полета требуется разумное и экономное их расходование. Именно поэтому газореактивные исполнительные двигатели должны иметь возможно больший удельный импульс.
Обычно в качестве рабочего газа в холодных газореактивных двигателях используется азот. Газ из баллона, в котором он хранится в сжатом состоянии, через общий главный клапан подается в редуктор. Здесь давление газа снижается, и далее через коллектор он поступает в сопло реактивных двигателей. Каждое сопло имеет свой электромеханический клапан, управляемый электрическими сигналами. Для изменения направления силы применяются два сопла.
С точки зрения динамики управления космическим летательным аппаратом очень важно так организовать работу газореактивных двигателей, чтобы длительность рабочего импульса была минимальной. Поэтому решающее значение имеет уменьшение времени срабатывания электромеханического клапана, которое определяется характером переходных электромагнитных процессов, происходящих в электрической обмотке и магнитопроводе (как при включении, так и при отключении клапана). При этом конструкция электроклапана, по сути дела, определяется динамическими показателями газореактивной системы в целом.
Газореактивные исполнительные органы могут работать и с горячим газом, который подогревается до подачи его в сопло. Это позволяет увеличить скорость истечения газа и тем самым повысить удельный импульс двигателя. Для подогрева газа используют либо специальные подогреватели (при этом расходуется дополнительная бортовая электроэнергия), либо тепло, получаемое за счет химических экзотермических реакций, происходящих в рабочей жидкости.
Электродвигатели-маховики. Применение электродвигателей-маховиков в качестве управляющих органов, расположенных по трем строительным осям космического аппарата (см. рис. 4), впервые было предложено К. Э. Циолковским в 1902 г.
Управление космическим аппаратом сводится к его ориентации и программным поворотам с помощью создания управляющих сил и соответственно моментов поворота, приложенных к корпусу аппарата. Если применять для целей ориентации и программного поворота газореактивную систему, то для сохранения направления ориентации необходимо поворачивать объект вокруг ориентированного направления в одну и другую сторону, создавая колебательные движения корпуса космического аппарата. Для поворотов и стабилизации космического аппарата необходимы газореактивные двигатели, осуществляющие прямое или обратное движение корпуса. Учитывая, что прямое и обратное движения осуществляются разными газореактивными двигателями, этот процесс колебательного движения с гашением этих колебаний требует больших расходов газа.
Физические процессы, возникающие при ориентации или программном повороте, легче всего проследить на примере двигателя переменного тока. Статор такого двигателя должен быть жестко закреплен на корпусе космического аппарата. Ротор электродвигателя, обладая большой инерциальной массой, может при этом свободно поворачиваться и вращаться в подшипниках. Из физических принципов взаимодействия тока с внешним магнитным полем вытекает, что при прохождении тока по ротору возбужденное им магнитное поле взаимодействует с внешним магнитным полем статора и создает механический момент, который вращает ротор в заданном направлении. Так как корпус электродвигателя жестко связан и закреплен на корпусе космического летательного аппарата, то по широко известному закону действия и противодействия статор начинает вместе с корпусом корабля двигаться в противоположном направлении. В соответствии с этим двигатель-маховик используется в системе управления космического аппарата для создания механического момента вокруг оси, параллельной оси вращения ротора двигателя-маховика.
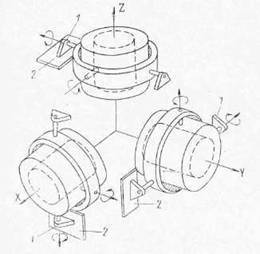 Рис. 12. Схема расположения трехстепенных управляющих моментных электрогироскопов: 1 — датчик момента на наружной рамке карданного подвеса; 2 — корпус |
Если космический аппарат движется в условиях, когда на него не действуют никакие силы сопротивления, то двигатель-маховик может длительное время обеспечивать силовое управление космическим аппаратом для ориентации корпуса параллельно оси своего ротора. Располагая три таких электродвигателя-маховика так, чтобы оси их роторов были параллельны трем строительным осям космического аппарата (рис. 4), можно обеспечить любую ориентацию и стабилизацию космического аппарата в целом, а следовательно, научной аппаратуры, установленной на космическом летательном аппарате.
Мы рассмотрели случай, когда управление космическим аппаратом осуществляется в условиях глубокого вакуума и когда на корпус аппарата не действуют внешние возмущающие силы или если аппарат получил при отделении от ракеты-носителя некоторую начальную угловую скорость. В том случае, если на корпус спутника воздействует какой-нибудь внешний момент (силы аэродинамического сопротивления, световое давление, гравитационное поле или другие внешние силы), то корпус с течением определенного времени приобретает некоторую угловую скорость вокруг какой-либо оси. Эту «паразитную» скорость можно ликвидировать только внешним же моментом — с помощью газореактивной системы или моментных магнитодвигателей, о которых будет сказано дальше. Физически это означает, что «паразитное» вращение приостанавливается, если перевести полученный корпусом кинетический момент «внутрь», запуская, например, ротор двигателя-маховика в направлении, по которому действовала внешняя сила и внешний вращающий момент. Тогда в соответствии с рассмотренными нами физическими процессами корпус получит обратное вращение, т. е. займет прежнее положение, а ротор будет с определенной скоростью вращаться внутри аппарата так, чтобы произведение момента инерции на угловую скорость вращения ротора в точности равнялось произведению момента инерции самого спутника на полученную им от внешних сил «паразитную» угловую скорость. В таком состоянии, с вращающимся ротором и с неподвижным в пространстве корпусом, спутник может двигаться по своей орбите. Если, однако, вновь появится какое-то сопротивление и снова корпус получит соответствующий импульс силы, который приведет к возникновению «паразитной» угловой скорости, то снова можно разогнать ротор, который примет на себя «паразитный» кинетический момент вращения.
Следует заметить, что этот процесс постепенного нарастания угловой скорости не может продолжаться бесконечно, ибо число оборотов двигателя-маховика дойдет до предельного, определяемого его механической прочностью. В то же время электроэнергетическая система питания не дает возможности дальнейшего увеличения скорости. Этот предел угловой скорости называют обычно «насыщением» двигателя-маховика. С точки зрения законов электротехники двигатель-маховик, например постоянного тока, набирая предельную скорость, может достичь такой ее величины, при которой противоэлектродвижущая сила, возникающая в обмотках ротора, будет равна приложенному напряжению. Ток, протекающий по двигателю, будет стремиться к минимальному значению, а момент вращения — к нулю. При этом уже невозможно будет создать дополнительный момент вращения для компенсации «паразитной» силы, которая возникает на корпусе космического аппарата.
Аналогичная картина будет наблюдаться и при использовании двигателя-маховика переменного тока, который при достижении так называемой синхронной скорости теряет возможность создавать механический момент относительно корпуса и, стало быть, аккумулировать кинетический момент, образованный внешними возмущающими силами. Такая характеристика моментов реакции электрических машин называется падающей характеристикой. Она имеет место при заданном постоянном напряжении источников тока в случае машин постоянного тока и максимальной частоты — для машин переменного тока.
Применение электродвигателей-маховиков для систематического накопления «паразитных» кинетических моментов вращения является весьма экономичным, если после достижения двигателем-маховиком своих предельных оборотов единовременно сразу затормозить ротор с помощью реактивных двигателей и тем самым получить свободу для нового накопления внешнего «паразитного» кинетического момента. Этот процесс ликвидации «насыщения», т. е. уменьшение скорости вращения, обеспечивается приложением к корпусу внешнего момента от газореактивных двигателей с одновременным включением электрического двигателя на режим торможения противотоком.
В этом случае двигатель-маховик сбрасывает свой кинетический момент и, стало быть, снова становится способным для накопления случайных внешних кинетических моментов, возникающих на космическом аппарате от внешних сил.
Автоматическая система управления тремя двигателями-маховиками конструируется таким образом, чтобы уменьшить общий кинетический момент ориентированного космического аппарата, для чего создается схема силового управления по трем строительным осям — симметрично для трех электродвигателей-маховиков, связанных с блоками управления.
В системе ориентации космического аппарата в отдельных случаях целесообразно использовать электромеханический наполнительный орган не в виде трех отдельных электродвигателей-маховиков, а в виде электрического двигателя с шаровым ротором, применяемым, как было сказано раньше, в морском судостроении. В этом случае употребляется статор типа дугового асинхронного электродвигателя (рис. 13). Электромагнитные моменты, создаваемые секторными статорными обмотками, могут действовать по любой из трех осей (или одновременно по двум осям) в соответствии с сигналами, поступающими от блока автоматики в системе ориентации и стабилизации.
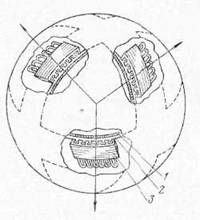 Рис. 13. Схема шарового электродвнгателя-маховика: 1 — сферический ротор; 2 — зазор; 3 — дуговой статор, применяемый для шаровых мельниц |
В том случае, если кинетические моменты электродвигателей-маховиков недостаточны для обеспечения поворотов космического аппарата в целом, применяются быстроходные силовые гироскопы в форме трех гироскопических устройств (см. рис. 12). Для подобных устройств рекомендуются каскадно-связанные гироскопические устройства.
Силовой космический моментный магнитодвигатель. Из рассмотрения различных типов исполнительных органов ориентации, стабилизации и программного поворота следует, что газореактивные двигатели вместе с двигателями-маховиками способны ликвидировать внешние «паразитные» моменты, воздействующие на космический летательный аппарат. Для этой же цели применяется так называемый космический моментный магнитодвигатель, использующий естественное магнитное поле Земли. В этом случае внутри космического аппарата устанавливаются электрические катушки (заменяющие работу газореактивных двигателей), токи в которых создают магнитные поля, необходимые для получения нужных моментов вращения.
 Рис. 14. Моментный магнитодвигатель системы разгрузки: 1 — магнитометр; 2 — моментный магнитодвигатель; 3 — блоки усиления и управления |
Принцип действия моментного магнитодвигателя (рис. 14) заключается в следующем. Космический аппарат при своем движении в околоземном пространстве пересекает двухполюсное магнитное поле Земли. Установленные в космическом летательном аппарате три силовые электромагнитные катушки со стальными сердечниками, взаимодействуя с магнитным полем Земли, могут создавать внешние моменты, воздействующие на корпус аппарата. При этом необходимо измерить магнитное поле Земли в каждом положении центра масс космического летательного аппарата во время орбитального полета и в зависимости от направления магнитного поля регулировать величину и направление токов в электромагнитных катушках (для создания необходимого внешнего момента вращения).
В качестве чувствительного элемента, измеряющего величину и знак магнитного поля Земли вдоль соответствующих осей, используются специальные датчики. Они представляют собой два параллельно расположенных пермаллоевых сердечника с распределенными по их длине первичными и вторичными обмотками (см. рис. 14). Первичные обмотки соединены последовательно-встречно и образуют цепь возбуждения. Поверх обмоток возбуждения размещена общая измерительная обмотка.
Принцип действия датчика основан на использовании свойств измерительной катушки, выполненной из магнито-мягкого материала. При наличии внешнего магнитного поля изменение магнитной проницаемости сердечников приводит к изменению магнитного поля в измерительной катушке и появлению в ней ЭДС индукции, которая растет пропорционально напряженности измеряемого магнитного поля. Сигнал с магниточувствительной катушки поступает в соответствующие электронные блоки для формирования соответствующих команд на включение тока в силовых электромагнитах. Иногда применяется вместо трех два магниточувствительных датчика и в соответствии с этим имеется два канала силового управления.
Электромагниты создают «силовые» магнитные поля, необходимые для получения механических моментов, обеспечивающих поворот и соответствующее вращение космического аппарата, а также процесс ориентации.
Таким образом, применение электромагнитной системы исключает расход газа в режиме стабилизации и ориентации. Этот принцип управления не только обеспечивает «успокоение» космического летательного аппарата, но и поиск ориентиров и последующую его стабилизацию. Однако следует отметить, что система «электромагнитной разрядки» значительно ухудшает свои показатели при увеличении радиуса орбиты в связи с уменьшением напряженности магнитного поля Земли.
Электрореактивные (ионные) двигатели малой тяги. Для создания внешних управляющих моментов, а также для коррекции орбиты при построении систем ориентации космического летательного аппарата можно применять электрореактивные двигатели. Принцип действия их основан на ускорении рабочего тела, например газа, при помощи электроэнергии, создаваемой специальным источником. Полученная скорость рабочего тела на выходе такого двигателя создает динамический импульс (произведение механической силы, действующей на корпус аппарата, на время, в течение которого газ под воздействием электромагнитного поля приобретает заданную скорость).
В отличие от тепловых (химических) реактивных электрореактивные двигатели, как указывал еще К. Э. Циолковский, имеют относительно высокую динамическую импульсную характеристику. Она определяется отношением величины тяги двигателя [кг] к секундному расходу массы [кг/с]. Если тепловые реактивные двигатели, использующие окислители и горючее, дают удельный импульс в несколько сотен секунд, то электрореактивные двигатели, в которых газ разгоняется с помощью электромагнитного поля, могут давать величину импульса в несколько тысяч секунд.
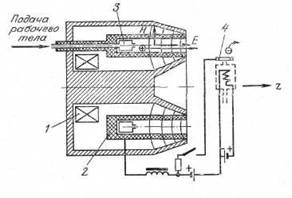 Рис. 15. Принципиальная схема электрореактивного двигателя (Н и Е — направления векторов соответственно магнитного и электрического полей; z — направление, противоположное действию силы) |
По режиму работы электрореактивные двигатели можно разделить на стационарные и импульсные, а по механическому характеру создания тяги — на электротермические и электромагнитные. При электромагнитном способе ускорения возможны схемы как с независимым магнитным потоком, воздействующим на плазму, так и с собственным магнитным полем. Рабочее тело электрореактивных двигателей при этом может быть твердым, жидким или газообразным, хорошо пропускающим электрический ток. Высокоэффективны реактивные двигатели с комбинированными полями, в которых напряженности электрического и магнитного полей в простейшем случае действуют перпендикулярно друг другу («скрещенные поля»).
Принципиальная схема одного из вариантов электрореактивного двигателя представлена на рис. 15. Основной элемент таких двигателей — коаксиальная магнитная система 1 с катушками намагничивания. Между полюсами помещается кольцевая диэлектрическая камера 2. В глубине ее находится анод 3, одновременно являющийся газораспределителем. Недалеко от среза канала расположен газоразрядный источник электронов — катод-нейтрализатор 4. Внутри цилиндрического канала создается неоднородное магнитное поле, направленное преимущественно по радиусу цилиндра (электрическое поле направлено вдоль канала).
Электрическая схема плазменного двигателя состоит из источника электроэнергии, преобразователя высокого напряжения и электродов, образующих замкнутый электрический контур циркуляции электромагнитной энергии. В этих условиях движение ионов можно считать практически прямолинейным (с учетом их дрейфа в скрещенных полях). Внутри ускорителя образуется облако вращающихся электронов, и нейтральные атомы, выходя из отверстий, попадают в это облако и ионизируются. Образующиеся ионы, взаимодействуя с электрическим полем, существующим в канале ускорителя, выходят из канала, имея направленную кинетическую энергию в соответствии с напряжением источника энергии, приложенным к аноду и катоду. Электроны, возникающие в процессе ионизации атома, нейтрализуются при выходе из катода нейтрализатора, когда вместе с ионами покидают систему.
Электрореактивная двигательная система космического летательного аппарата состоит из баллонов с рабочим веществом, в которые вмонтирована система клапанов и вспомогательных элементов; преобразователя напряжения системы автоматики и телеметрии; двигательных блоков, содержащих собственно двигатель и катодный нейтрализатор.
Впервые в мире стационарные плазменные двигатели непрерывного действия были исследованы и испытаны на искусственном спутнике Земли «Метеор». С помощью плазменного ионного двигателя спутник на несколько десятков километров поднимался и опускался относительно орбиты выведения.
Следует заметить, что электрореактивные двигатели обладают хорошими регулировочными характеристиками, высокой надежностью и малым весом. Однако при этом требуется установка на космический аппарат достаточно мощных электрических источников энергии. Но в будущем, по мере развития электроэнергетики космических летательных аппаратов, роль и значение электрореактивных двигателей несомненно будут возрастать.
Комбинированные управляющие исполнительные органы. Для обеспечения высокой точности стабилизации и ориентации космического летательного аппарата обычно используются системы, состоящие из трех ступеней исполнительных органов. Первая ступень (быстродействующая) — электродвигатели-маховики; вторая ступень — управляющие моментные электрогироскопы; третья ступень — космические моментные электродвигатели, газореактивные или электрореактивные двигатели. Такая трехступенчатая система позволяет наиболее полно сочетать свойства стабилизирующих устройств электродвигателей-маховиков, обладающих большим рабочим диапазоном «до насыщения», с моментными электрогироскопами, имеющими малый рабочий диапазон.
Электрореактивные маховики отрабатывают малые возмущения, а также компенсируют влияние нелинейностей, которые присущи силовым управляющим электрогироскопам.
Моментные электрогироскопы, действующие по трем осям (см. рис. 12), используются для постоянной разгрузки электродвигателей-маховиков, что позволяет существенно уменьшить габариты спутника и обеспечить его маневренность. Однако система моментных гироскопов также имеет предел «насыщения», связанный с тем, что по мере перевода внешнего кинетического момента во внутренний возможности для аккумулирования кинетического момента уменьшаются.
Чтобы разгрузить управляющий моментный электрогироскоп от «насыщения», используют газореактивные, электрореактивные или космические моментные магнитодвигатели, которые создают управляющие моменты при помощи магнитного поля Земли и тем самым обеспечивают точность стабилизации и ориентации космического аппарата при применении всех трех ступеней комбинированной системы исполнительных органов.
Электромеханическая система терморегулирования. Несомненно, очень важной является проблема обеспечения заданной температуры для работы всех приборов и механизмов, находящихся как внутри, так и вне космического летательного аппарата. Терморегулирование приборов, находящихся вне космического аппарата, обычно осуществляется за счет естественного теплопоглощения и теплоизлучения поверхностей в условиях глубокого вакуума. Основное назначение системы терморегулирования внутри космического аппарата — это отвод тепла, выделяющегося при работе приборов, а также тепла, получаемого аппаратом от Солнца и Земли.
Необходимая температура внутри аппарата сохраняется, если обеспечивается баланс притока тепловой энергии к объекту и удаления ее из объекта путем излучения в космическое пространство.
Излучающие поверхности космического аппарата могут быть стационарными или регулируемыми с помощью жалюзи или передвижных экранов. В любом случае подвод тепла к излучающим поверхностям осуществляется с помощью жидких или газообразных теплоносителей. Работа системы терморегулирования обеспечивается электромеханическими устройствами, которые осуществляют открытия, закрытия, перемещения жалюзи и экранов, регулирующих поступление и излучение энергии, а также вращение насосов и вентиляторов, обеспечивающих движение теплоносителей, переносящих тепло от нагретых участков космического аппарата к его холодным поверхностям.
Особые проблемы при терморегулировании связаны с отводом тепла из орбитальных тепловых космических электростанций с ядерным или химическим топливом, поскольку на этих станциях вследствие низкой величины их КПД необходимо отводить большое количество энергии в вакуум при относительно высокой температуре излучающих поверхностей.
Электромеханика автономных систем источников электроэнергии. Если средняя мощность электрической энергии на современных космических аппаратах исчисляется несколькими киловаттами, то в будущем потребуются сотни и тысячи киловатт. Электрическая энергия в принципе может быть получена в результате преобразования других видов аккумулированной энергии — тепловой (при химических реакциях между горючим и окислителем), ядерной (при использовании ядерного горючего) или путем прямого преобразования энергии солнечных фотонов.
Системы генерирования электромагнитной энергии при использовании химического или ядерного топлива включают следующие электромеханические агрегаты: турбогенераторы, преобразующие механическую энергию турбины в электрическую энергию; электронасосы различных типов и конструкций, рассчитанные на различные мощности, для обеспечения циркуляции пара или жидкости; электродвигатели насосов для перекачки охлаждающих агентов через излучатель, отводящий тепловые потери как в реакторах или котлах, так и в системах собственных нужд, обслуживающих эту тепловую космическую электростанцию.
Особенностью машинных способов получения электрической энергии с помощью турбогенераторов является необходимость компенсации реактивного момента, который возникает в корпусе генератора при его нагрузке. При применении вращающихся машин (турбогенератора или насосов) для получения энергии приходится устанавливать парные турбогенераторы или специальные маховики-компенсаторы, имеющие для ликвидации моментов реакции на корпус противоположные направления вращения. Парные турбогенераторные агрегаты должны быть при этом снабжены чувствительными регуляторами частоты и напряжения, необходимыми для компенсации механических моментов, воздействующих на корпус космического летательного аппарата при изменяющихся электронагрузках бортовой электросети. Такую же компенсацию механических сил, связанных с нестационарным движением в замкнутом контуре ионизированного газа или жидкости, необходимо осуществить для линейных генераторов электрической энергии.
Одна из главных проблем космических электростанций — создание излучателя, предназначенного для охлаждения газа, циркулирующего в контуре теплоносителя, и для отвода тепла в мировое пространство. Эти излучатели должны иметь минимальные вес и толщину стенок, но в то же время должны быть достаточно надежными для работы в течение длительного времени. Так же, как и при машинном способе генерирования электроэнергии в космических аппаратах, отвод большого количества тепла необходим в устройствах прямого преобразования тепловой («топливной») энергии в электрическую. Принцип прямого преобразования энергии в электрическую основан на прохождении теплового потока в камере сгорания химического топлива (горючего и окислителя) или в атомном реакторе через полупроводниковое или термоэмиссионное устройство, или, наконец, через ионизационную камеру МГД-генератора. Во всех трех случаях тепловой поток создается за счет разности температур между охладителем и камерой, и поэтому для регулирования расхода теплоносителя и сохранения постоянства температурных режимов в реакторе или камере сгорания необходимо иметь автоматизированные электромеханические насосы и электромеханическую аппаратуру. Аналогичные электромеханические системы терморегулирования применяются и в радиоизотопных генераторах прямого преобразования ядерной энергии в электрическую.
Специфические электромеханические системы терморегулирования применяются в топливных элементах прямого преобразования энергии горения горючего и окислителя (например, водорода и кислорода) в электрическую энергию с очень высоким КПД (до 98%). При этом электромеханические системы обеспечивают соответствующий уровень давления газов, отвод дистиллята и сохранение общего температурного режима за счет искусственного охлаждения.
Конструктивные формы и состав электромеханических устройств (а также специальных излучателей), предназначенных для прямого преобразования «топливной» энергии в электрическую на космических летательных стационарных аппаратах, зависят от мощности космической электростанции, а также от назначения и длительности энергоснабжения бортовых потребителей.
Создание специальных излучателей для отвода тепловой энергии как от ядерного реактора, так и от системы с химическим топливом является сложной проблемой, так как при этом возникают высокие температуры (до нескольких сотен градусов). В случае производства электроэнергии в бортовой электростанции мощностью несколько десятков и сотен киловатт необходимы очень большие поверхности излучателей, исчисляемые сотнями и тысячами квадратных метров. В то же время электрические машины и генераторы, а также электротехническая аппаратура должны быть работоспособны и длительно функционировать при 500 — 600°С.
Именно поэтому использование солнечных батарей для получения электрической энергии в космических аппаратах является на данном этапе наиболее перспективным. Хотя и. в этом случае также требуются большие поверхности, однако электротехническое оборудование, и в том числе электромеханические системы, связанные с организацией движения поверхностей солнечных батарей, может работать при низких температурах.
Преобразование солнечной энергии в электрическую. Солнечные батареи представляют собой жесткие или гибкие панели с закрепленными на них полупроводниковыми фотоэлементами. Эти панели конструктивно располагаются либо по цилиндрической или сферической поверхности, либо по плоской поверхности.
Путем коммутации многих сотен и тысяч фотоэлементов, имеющих напряжение в пределах долей вольта, создается система с напряжением в несколько десятков вольт и током в десятки ампер. Современные солнечные батареи могут вырабатывать электрическую энергию в пределах (в зависимости от геометрических размеров батарей) нескольких киловатт, а в перспективе — нескольких сотен киловатт. Жесткие или гибкие солнечные батареи могут укрепляться либо в отдельном энергетическом отсеке, либо непосредственно в космическом летательном аппарате.
На панелях солнечных батарей устанавливаются фотодатчики, которые регистрируют направление солнечных лучей, под различными углами падающих на панели. Датчики солнечных батарей через электронное усилительное устройство следящего электропривода соединяются с электрическими двигателями постоянного или переменного тока, которые через соответствующее редукторное устройство поворачивают траверсу с панелями таким образом, чтобы они были ориентированы на Солнце независимо от ориентации космического летательного аппарата. В случае жесткого закрепления каркасов на поверхности космического летательного аппарата ориентация на Солнце осуществляется путем поворотов корпуса космического аппарата.
Электрические двигатели, управляющие поворотами каркасов солнечных батарей, можно расположить как вне, так и внутри космического аппарата или энергетического модуля. Конструктивные формы этих электрических машин должны быть спроектированы так, чтобы обеспечить отвод тепла или за счет естественной радиации, или же предусматривать искусственное охлаждение системы. Чаще всего в качестве таких исполнительных электрических машин используются двухфазные асинхронные электродвигатели.
В некоторых случаях электрические двигатели с редукторами устанавливаются внутри энергетического модуля или корпуса космического летательного аппарата только по одной оси, но тогда передача момента вращения от такого электромеханического устройства осуществляется через оболочку корпуса космического летательного аппарата с помощью постоянного магнитного поля. Создание магнитного поля обычно осуществляется постоянными магнитами в форме муфты, максимальный момент которой с большим запасом должен превышать номинальный момент вращения плоскостей солнечной батареи (с учетом маховых моментов при разгоне и остановке солнечных батарей). Таким образом, подобная следящая система обеспечивает соответствующее движение солнечных батарей и ориентацию в направлении Солнца и при движении космического летательного аппарата по орбите создает условия для поглощения максимального количества солнечной энергии и соответствующего ее преобразования в электрическую.
Поскольку вращательные моменты, создаваемые электродвигателями и необходимые для поворота солнечных батарей (как и любого электропривода с большой инерциальной массой), могут быть очень большими, то рассмотрим общую динамику космического летательного аппарата при нестационарном движении (ускорении и торможении) солнечной батареи или других механизмов относительно корпуса космического аппарата. Очевидно, что при этих нестационарных движениях будут возникать реактивные моменты, которые могут привести к нарушению ориентации космического летательного аппарата. Для того, чтобы ликвидировать реакцию на корпус космического аппарата от любого (а особенно мощного) электродвигателя и тем самым ликвидировать «паразитные» моменты, нарушающие ориентацию, обычно создается параллельный отвод энергии вращения с вала электрического двигателя на специальный маховик, вращающийся в обратную сторону (рис. 16). (Обратное вращение маховика достигается путем применения специального редуктора с нечетным передаточным числом). Кинетический момент этого маховика почти полностью компенсирует кинетические моменты, обусловленные движением панелей солнечных батарей.
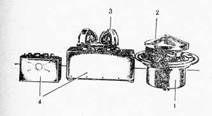 Рис. 16. Схема электропривода: 1 — редуктор; 2 — маховик компенсации момента; 3 — солнечные датчики; 4 — блоки усиления и управления |
На соответствующих осях движения солнечной батареи в целях облегчения динамических режимов работы автомата следящей системы устанавливаются тахогенераторы, обеспечивающие введение сигнала по угловой скорости в блок управления. Очень важным звеном электромеханической следящей системы является датчик положения, в качестве которого используется, например, сельсинная передача, обусловливающая обратную связь в любой следящей системе на космическом летательном аппарате, в том числе для привода солнечной батареи.
В связи с тем, что космический летательный аппарат в различные моменты времени заходит в тень планеты, то для непрерывного обеспечения электроэнергией его аппаратуры на борту устанавливается аккумуляторная батарея, допускающая большое количество включений и выключений. С помощью специальной релейной механической контактной аппаратуры и соответствующей автоматики обеспечивается нормальная работа аккумуляторной батареи при зарядке и разрядке.
Мы здесь рассмотрели наиболее распространенные источники электроэнергии — солнечные батареи и соответственно аккумуляторные батареи на постоянном токе, обеспечивающие непрерывную работу всей аппаратуры спутника. Однако большинство бортовых приборов работает на переменном токе различных частот (50, 200, 400 и 1000 Гц и более). На первом этапе развития космической техники для создания источников переменного тока при наличии аккумуляторов постоянного тока использовались электромеханические машинные преобразователи, преобразующие постоянный ток в переменный. Это были двух- или трехмашинные мини-агрегаты с соответствующим регулятором частоты и напряжения, имеющим весьма важное значение для точной работы асинхронных и синхронных гистерезисных электродвигателей-гироскопов. В настоящее время машинные преобразователи заменены статическими силовыми полупроводниковыми преобразователями. Для обеспечения точной частоты в этих приборах применяется кварцевый стабилизатор частоты. Применение солнечных батарей как основных источников энергии на космических аппаратах с использованием лазерной техники, техники высоких напряжений и радиотехники создает предпосылки для дальнейшего развития статических преобразователей различных типов.
Электромеханика самоходного аппарата «Луноход». Современный уровень развития космической техники позволил осуществить вывод на окололунную орбиту космического аппарата с посадочным блоком для спуска на поверхность Луны. С помощью такого посадочного блока на поверхность Луны были, в частности, доставлены «Луноходы».
Прообразом «Лунохода» является электротрактор на колесном ходу, который имеет соответствующие аккумуляторные батареи и электрический привод, соединенный с ходовой частью и снабженный аппаратурой регулирования. Особенность «Лунохода» заключается в том, что на нем установлены несколько двигателей, встроенных в механизмы движения колес. Регулирование этих двигателей и изменение направления их вращения обеспечиваются соответствующим автоматом в зависимости от заданной программы или с помощью радиокоманд, поступающих с Земли. «Луноход» снабжен соответствующей фототелевизионной системой и электромеханическими приборами ориентации и управления, позволяющими через свои радиоприемные устройства получать из центра управления соответствующие радиокоманды, осуществлять движение и маневры.
Электромеханика автоматической межпланетной станции «Викинг». Американская межпланетная станция «Викинг» состоит из двух блоков: орбитального и посадочного. Орбитальный блок предназначен для вывода научной аппаратуры на орбиту искусственного спутника Марса и снабжен соответствующими радиотехническими системами и антеннами, обеспечивающими, в частности, связь посадочного блока с наземными приемными станциями.
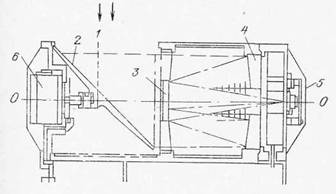 Рис. 17. Инфракрасный радиометр станции «Викинг» |
Электромеханические системы орбитального блока не отличаются существенно от применяемых в типовых искусственных спутниках Земли. Однако для большей надежности в них введено двухкратное резервирование наиболее важных бортовых систем: ориентации, стабилизации, измерительных датчиков, электрогироскопов и управляемых электромеханизмов. Система энергопитания состоит из солнечных батарей с автоматической электромеханической системой ориентации на Солнце и из соответствующих химических батарей.
Наибольший интерес представляет электромеханический инфракрасный радиометр (рис. 17) для фотографирования и измерения температуры на поверхности Марса. Принцип его конструкции заключается в следующем. Зеркальный искатель 2 перемещается в пространстве вдоль главной оптической оси О — О. В зависимости от модификации ИК-радиометр имеет электромеханизм либо линейных, либо вращательных перемещений. Пространственное перемещение вокруг оси измеряется прецизионным датчиком с точностью в пределах нескольких угловых минут. Этот датчик регистрирует пространственное положение зеркала-искателя и с помощью электронного устройства регулирует линейные или вращательные движения элементов электродвигателя 6.
Излучение, поступающее через вход радиометра 1, после отражения от зеркала-искателя 2 попадает на оптическую систему с двойным отражением 3 — 4 и далее через световоды и светофильтры — на чувствительный приемник или электронный фотоумножитель 5. Электронный усилительный блок усиливает полученные видеосигналы и передает изображения через канал радиосвязи на наземные станции приема. Таким образом, телевизионные изображения в форме видеосигналов при движении орбитального блока по траектории вокруг Марса определяются механическим движением сканирующего зеркала-искателя. Чтобы получить такое же изображение на фоточувствительной пленке, необходимо иметь на приемном пункте синхронное и синфазное электромеханическое оптическое устройство, физические принципы которого были описаны в разделе о функциональных системах.
Если для искусственных спутников Земли, в том числе для геостационарных, движущихся в околоземном пространстве на расстоянии до 36 тыс. км от Земли, проблема передачи видеосигналов с использованием синхронных и синфазных электрических машин является относительно простой задачей, то передача изображения с планет, отстоящих от Земли на расстоянии нескольких сотен миллионов километров, чрезвычайно сложна технически. Эта проблема, в частности, требует точных приборов измерения времени и радиотехнических средств для синхронизации импульсов, обеспечивающих синхронное и синфазное движение электродвигателей при возможных электромагнитных помехах в. радиотракте на дальних расстояниях.
Посадочный блок межпланетной станции «Викинг» конструктивно выполнен (рис. 18) в виде шестигранной платформы, на которой размещены основные системы и устройства. Система энергопитания состоит из двух радиоизотопных термоэлектрогенераторов 1, осуществляющих прямое преобразование тепловой энергии в электрическую с помощью полупроводниковых элементов, охлаждаемых специальным образом. В систему входят также аккумуляторные батареи, подключаемые в момент потребления максимальной мощности. Грунтозаборное устройство 2 посадочной станции предназначено для сбора образцов грунта с участков поверхности площадью в несколько десятков квадратных метров, а также для выполнения исследований и анализа микро- и макроструктуры грунта, в том числе биологического. Устройство смонтировано на телескопической штанге, с помощью которой оно может выдвигаться на несколько метров и поворачиваться как в вертикальной, так и в горизонтальной плоскостях.
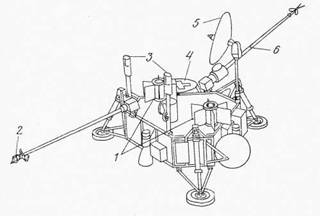 Рис. 18. Общий вид посадочного блока «Викинга» |
Для поступательных и угловых перемещений устройства попользуются электрические двигатели постоянного тока: два — для поворотов, один — для поступательных перемещений телескопической штанги, еще один — для вращения грунтозаборного устройства.
В грунтозаборном устройстве применяются машины постоянного тока с щетками и коллекторами. Эти узлы герметизированы, чтобы щеточная пыль не попадала в отобранные для исследований порции грунта. Однако в рассматриваемом случае применение бесколлекторных и бесщеточных электродвигателей постоянного тока, по мнению автора, представляется более целесообразным.
Система автоматического управления грунтозаборного устройства обеспечивает подачу грунта в соответствующую камеру. На шестигранной платформе посадочного блока расположены также телевизионные камеры 3, радиотрансляционная антенна 4, остронаправленная антенна с электроприводом 5 и штанга 6 с метеорологическими приборами для исследований явлений в области метеорологии и сейсмологии.
Космические астрономические обсерватории. В предыдущих разделах мы рассмотрели электромеханические системы и отдельные устройства, которые с успехом применяются в современной космической технике. Однако уже сейчас возникают новые направления электромеханики в космосе, требующие разрешения трудных, но принципиально важных проблем.
За последние годы все чаще и чаще в программу искусственных спутников Земли, пилотируемых кораблей, орбитальных станций стали входить астрофизические и астрономические исследования.
Как известно, влияние земной атмосферы сильно сказывается на наблюдениях, проводимых наземными оптическими телескопами, и ограничивает их разрешающую способность. Поэтому вывод оптических телескопов достаточно большого диаметра за пределы атмосферы, на орбиту вокруг Земли сейчас разрабатывается специалистами различных стран.
Многочисленные исследования по внеатмосферной астрономии и физике околоземного пространства были проведены на «Протоне», «Союзе», «Салюте». На космическом корабле «Союз-13», например, с целью получения ультрафиолетовых спектрограмм звезд была установлена бортовая обсерватория «Орион-2».
Для того чтобы обеспечить точное автоматическое наведение телескопа этой космической обсерватории, установленного вне корпуса корабля, на заданную звезду, была создана ступенчатая система управления. Ее первая ступень предусматривала участие космонавта, который находясь внутри корабля, должен был манипулировать специальной системой визирования, установленной напротив одного из иллюминаторов корабля, и ориентировать «связку» телескопов с помощью звездных фотогидов на исследуемую звезду. После захвата звезды вступала в действие автоматическая электромеханическая система слежения, обеспечивающая достаточную точность, чтобы сфотографировать на весьма чувствительную пленку спектрограмму звездного излучения.
На обсерватории «Орион-2» была установлена трехосная стабилизированная платформа, несущая телескопы и звездные датчики. Трехосная стабилизация осуществлялась за счет одновременного визирования двух опорных звезд. Электрические сигналы рассогласования через усилительную систему поступали на управляющие обмотки электродвигателей, связанных с телескопами через волновые редукторы. Во время фотографирования звезд «Союз-13» ориентировался при помощи построителя местной вертикали с точностью до нескольких угловых градусов. Однако так как для фотографирования необходимо было иметь точность стабилизации в несколько угловых секунд, то была создана малогабаритная следящая система с электродвигателями постоянного тока и полупроводниковая система регулирования с генераторами обратной связи, обеспечивающие необходимую точность стабилизации телескопов.
Результаты этого полета позволили получить спектрограммы далеких звезд (величиной 10 — 13m) в ультрафиолетовом диапазоне, что невозможно осуществить с помощью наземной аппаратуры. Тем самым, рассмотренная бортовая астрономическая обсерватория «Орион-2» внесла большой вклад во внеатмосферную астрономию, хотя и имела очень малый диаметр телескопа.
За последние годы в США с привлечением крупнейших ученых других стран проектируется «Большой космический телескоп» диаметром зеркала 3 м, который предполагается вывести на круговую орбиту высотой 360 км. Эта астрономическая обсерватория — спутник, корпус которого одновременно является корпусам телескопа. На рис. 19 представлена оптико-электронная схема телескопа. С помощью «Большого космического телескопа» можно будет изучать очень слабые небесные объекты до звездной величины +29m (с помощью самых мощных наземных телескопов можно исследовать лишь объекты до величины +22m). Точность стабилизации движения изображения внутри космического телескопа предполагается до 0,005". Основным элементом космического телескопа является оптическая труба, научные приборы и модуль ориентации. Панели солнечных батарей должны снабжать космический телескоп и всю обсерваторию электроэнергией. Ориентацию и стабилизацию «Большого космического телескопа» по трем строительным осям предполагается осуществлять с помощью отмеченной выше комбинированной трехступенчатой системы: электродвигателем-маховиком, силовым моментным электрогироскопом и космическим моментным магнитодвигателем или газореактивной системой малой тяги.
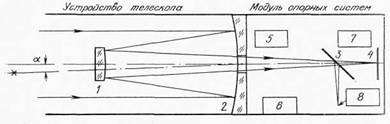 Рис. 19. Оптико-электронная схема «Большого космического телескопа»: 1, 2, 3 и 4 — оптические зеркала; 5 — вычислительный модуль; 6 — прецизионные гироскопы-датчики; 7 — моментные электрогироскопы; 8 — датчики точного наведения; α — угол отклонения от заданного направления |
Структурная схема силового моментного электрогироскопа (по одной из строительных осей) представлена на рис. 9.
Одной из проблем, возникших при проектировании телескопа, была необходимость стабилизации движения изображения с точностью 0,005" (от среднеквадратичного значения), требуемой для получения максимального выигрыша по сравнению с наземными дифракционными телескопами (имеющими относительно слабое разрешение). На первом этапе решения этой проблемы пытались создать систему управления, использующую вторичное зеркало стабилизации, с точностью ±1". При дальнейшей разработке «Большого космического телескопа» использовались модели, рассчитанные с помощью ЭВМ, на которых сравнивались методы стабилизации и ориентации, использующие моментный гироскоп и электрореактивные маховики при различных внешних воздействиях. Эти экспериментальные исследования показали, что в принципе планируемая точность стабилизации спутника вполне возможна. Однако перед конструкторами встали весьма трудные проблемы, для разрешения которых потребуются «ропотливые экспериментальные исследования вибрации электрореактивных маховиков, возникающей гари дебалансе и в зонах нечувствительности в измерительных приборах. Каждый из этих факторов может ухудшить стабилизацию. Корабль с космическим телескопом имеет форму усеченного конуса. Центр пересечения основных строительных осей спутника размещен в центре его масс. Управление телескопом (в целом) осуществляется бортовой ЭВМ, на выходе которой имеются внешние блоки управления электромеханическими исполнительными органами телескопа.
Быстродействующие внешние моменты воспринимаются электродвигателями-маховиками, которые после «насыщения» разоружаются с помощью силовых гироскопов стабилизации. Принцип электромеханического управления заключается в том, что в момент торможения с помощью противотока в роторе электродвигателя-маховика подается команда не на газореактивный двигатель или моментный магнитодвигатель, а на моментный электродвигатель (ЭД) (см. рис. 9) силового электрогироскопа стабилизатора. В результате гироскоп (Г) поворачивается на некоторый угол, воспринимая на себя, как это следует из законов механики, кинетический момент электродвигателя-маховика. После достижения некоторого угла поворота, называемого углом «насыщения» силового гироскопа (в отличие от «насыщения» скорости вращения электродвигателя-маховика), подается команда на «разгрузку» угла поворота силового электрогироскопа с помощью газореактивной или магнитомоментной системы исполнительных органов. Таким образом, обеспечивается высокая прецизионность силового управления «Большим космическим телескопом» в пространстве.
Электромеханика синтезированных летательных аппаратов. Интересным направлением развития космических летательных аппаратов является создание в будущем электрореактивного электроплана. К. Э. Циолковский в своей работе «Исследования мировых пространств реактивными приборами» писал: «Может быть с помощью электричества можно будет со временем придавать громадные скорости выбрасываемым из реактивного прибора частицам. И сейчас известно, что катодные лучи трубки Крукса сообщают электронам, имеющим массу в 4000 раз меньше массы атома гелия, скорость, которая может достигать до 30 — 100 тыс. км/с, т. е. что в 6 — 20 тыс. раз больше скорости продуктов горения, выталкиваемых из нашей реактивной трубы».
Как уже отмечалось, электрореактивные двигатели малой тяги используются в различных космических аппаратах для изменения траектории полета или их орбиты обращения вокруг Земли. Однако в свете современных достижений физики твердого тела и с учетом перспектив развития науки в этой области принцип работы электрореактивных двигателей, которые при наличии мощного источника энергии потребляют ничтожное количество массы для создания тягового усилия, позволит в будущем создать перспективные летательные аппараты с применением силовых маршевых электрореактивных двигателей.
В настоящее время, как известно, во всем мире ведутся работы по повышению КПД солнечных батарей, преобразующих энергию квантов солнечного света непосредственно в электрическую энергию. Если удастся создать такие пленочные материалы, которые поднимут КПД солнечных элементов до нескольких десятков процентов, то при применении соответствующей электронной технологии микросхем можно на больших поверхностях, исчисляемых сотнями и тысячами квадратных метров, получать достаточное количество энергии для работы маршевых двигателей и обеспечить движение космических летательных аппаратов к самым дальним планетам Солнечной системы.
Полуфантастическая конструкция — электроракетоплан — имеет на своем борту мощную электростанцию, обладающую достаточно малой массой. Энергия от такой электростанции подводится к электрореактивным двигателям, вращающим вертолетный винт огромного диаметра и располагающимся на его трех лопастях вместе с соответствующими запасами излучающей массы. Электрореактивные винты большого диаметра дают очень большую силу тяги на единицу расходуемой мощности, и поэтому такой винт способен в вертикальном режиме поднять летательный аппарат на орбиту вокруг Земли.
По мере набора скорости такой космический аппарат переходит из вертикального режима в режим наклонного полета, и, кроме того, в условиях разреженной воздушной атмосферы увеличивается угловая скорость вращения электрореактивного винта, который продолжает дальше разгонять аппарат до сверхзвуковых скоростей. После получения электропланом необходимой скорости лопасти его электрореактивного винта, до этого работающие в самолетном режиме, поворачиваются вокруг своих продольных осей. Тем самым достигаемая тяга со всех трех лопастей будет создавать общую тягу уже в направлении продольной оси движения электроракетоплана. После выхода на орбиту электроракетоплан способен возвратиться по спиральной кривой опять на Землю в результате гашения своей космической скорости в течение относительно длительного промежутка времени, при котором возникающие тепловые процессы не выводят из строя рабочие элементы электродвигателей.
Общие перспективы развития космических электромеханических систем. Среди научно-прикладных задач, решаемых в современной космонавтике, исключительное значение имеет использование космических средств в интересах народного хозяйства. Речь идет о космических лабораториях, на борту которых в условиях глубокого вакуума и невесомости в будущем будет организовано производство новых материалов: металлов, проводников, полупроводников, а также изоляционных и магнитных материалов. Создаваемые вначале в специальных орбитальных лабораториях, они будут затем производиться в космических мастерских, цехах и даже опытных производствах. Такие лаборатории, мастерские и опытные производства, естественно, должны размещаться в космических кораблях огромного объема и тоннажа, присущих сегодняшним морским кораблям.
Для осуществления всего этого в будущем необходима полная электрификация объектов, существующих ч действующих в космическом пространстве. Так как технической базой электрификации являются средства электротехники, то создание электрифицированных объектов на орбитах планет и на самих планетах является задачей будущей электротехники.
Мы рассмотрели электромеханику как отрасль электротехники применительно к космическим аппаратам и космическим станциям. Эта отрасль науки и техники будет все время развиваться. Электромеханические системы сложных агрегатов для автоматизации и механизации технологических процессов включают целый комплекс электрических машин постоянного и переменного тока с соответствующими электронными блоками и с синтезированными управляющими ЭВМ для решения задач автоматического регулирования и управления этими процессами.
Очевидно, что эти направления развития электромеханики должны быть соответствующим образом учитывать условия космической среды, в которой действуют космические орбитальные станции, а в будущем — условия окружающей среды планет и спутников Солнечной системы.
Как новая зарождающаяся отрасль техники космическая электромеханика будучи синтезом электрических машин, аппаратов, низковольтных систем регулирования, электронной техники, имеет свои внутренние законы, определяющие физические процессы и конструктивные формы этого синтеза. Сейчас, например, создаются целые серии бесколлекторных, бесщеточных машин постоянного тока, в которых коллекторы и щеточные узлы заменяются транзисторными и тиристорными блоками, обеспечивая тем самым их высокую надежность и длительность срока службы, исчисляемую годами.
Такой синтез электронной техники и техники электрических машин и аппаратов накладывает свои особенности на физические процессы, методику расчета, конструктивную компоновку и, следовательно, обеспечивает минимальные весовые, объемные габариты и высокие эксплуатационные характеристики таких электромеханических комплексов.
Особое развитие в космической электромеханике получит метод сращивания мини-ЭВМ непосредственно с обмотками импульсных шаговых электродвигателей. Более того, обычные асинхронные, синхронные, гистерезисные двигатели и бесщеточные двигатели постоянного тока, а также шаговые двигатели будут создаваться со встроенными в конструкциях тахогенераторами и датчиками, определяющими пространственное положение ротора относительно статора и применяемыми в прецизионных следящих системах синхронного движения и синхронного поворота.
Новым, весьма интересным разделом общей микроскопической электромеханики является раздел, связанный с созданием магнитогидродинамических генераторов (МГД) для производства электрической энергии; ионоплазменных реактивных двигателей, а также с линейными электрогидравлическими насосами, в которых движение ионизированных газов и жидкостей подчиняется законам движения вещественных инерциальных частиц в электрических и магнитных полях.
Указанные выше элементы и средства электромеханики применительно к сложным системам движения объединяются в электромеханические системы. Так как движение всех машин и аппаратов требует соответствующего регулирования и управления с помощью электрических приборов, то на современном этапе развития электромеханики эти системы невозможно рассматривать без анализа коммутационных схем, замкнутых контуров тока, включающих источники электроэнергии, в которых динамические процессы в форме механического движения отдельных массовых деталей, роторов, якорей сопровождаются электродинамическими явлениями в конструкции схемы в целом.
Перспективы дальнейшего развития космических аппаратов, космических орбитальных станций с установленными на них производственными агрегатами и образованием промышленно-производственных комплексов на планетах и спутниках Солнечной системы требуют тщательного разрешения комплексных проблем электромеханики. К ним относятся:
создание бортовых и планетарных следящих электромеханических систем высокой точности и эффективности, предназначенных для поддержания определенного положения спутника или его конструктивных элементов относительно астрономических ориентиров;
исследования по выбору оптимальных способов энергоснабжения аппаратуры космического корабля или планетной станции, связанные как с определением необходимого качества электроэнергии, так и с достижением наиболее эффективных решений по ее преобразованию и коммутации;
исследования длительной работоспособности в условиях космического пространства или среды, окружающей планеты, систем силовых и управляющих электротехнических элементов (электродвигателей постоянного и переменного тока, контактной и бесконтактной коммутационной аппаратуры, элементов транзисторно-преобразовательной техники, кабельных изделий и соединений электротехнических материалов);
создание комплексов бортовой информационной радиоэлектронной аппаратуры, предназначенной для регистрации, преобразования, запоминания и передачи различного рода информации о Земле и ее атмосфере; решение проблем, связанных с разработкой и исследованием высокочувствительных приемников — преобразователей излучений в различных областях спектра электромагнитных волн; малогабаритных запоминающих устройств, высокоинформативных передатчиков и эффективных антеннофидерных трактов;
разработка специальных методик наземных исследований и испытаний бортовой аппаратуры и спутников в целом, обеспечивающих длительную надежную и безотказную работу спутников в орбитальном полете, создание комплексов испытательного оборудования.
Андронов И. Электротехника в космосе. — «Электротехника», 1970, № 7.
Иосифьян А. Г., Каган Б. М. Основы следящего привода. М., Госэнергоиздат, 1957.
Иосифьян А. Г. Вопросы электромеханики. М., «Энергия», 1975.
Ишлинский А. Ю. Ориентация, гироскопы и инерциальная навигация. М., «Наука», 1976.
Раушенбах Б. В., Токарь Е. Н. Система ориентации спутника «Молния-1». — В сб.: «Труды международного симпозиума ИФАК. «Управление в пространстве». Т. 1. М., «Наука», 1975.
С. Дж. Севант. Принципы инерциальной навигации. М., «Мир», 1965.
Андраник Гевондович Иосифьян
ЭЛЕКТРОМЕХАНИКА В КОСМОСЕ
Главный отраслевой редактор И. Г. Вирко . Редактор Е. Ю. Ермаков. Младший редактор Т. И. Полякова. Обложка Э. А. Смирнова. Худож. редактор В. Н. Конюхов. Техн. редактор Т. Ф. Айдарханова. Корректор С. П. Ткаченко.
Т—05021. Индекс заказа 74203. Сдано в набор 20/ХП-76 г. Подписано к печати 15/II-77 г Формат бумаги 84 x 108 1|32. Бумага типографская № 3. Бум. л. 1,0. Печ. л. 2,0. Усл. печ. л. 3,36. Уч.-изд. л. 3,14: Тираж 34 300 экз. Издательство «Знание». 101835, Москва, Центр, проезд Серова, д. 4. Заказ 2334. Типография Всесоюзного общества «Знание». Москва, Центр, Новая пл., д. 3/4.
Цена 11 коп.