Сервейер-3
Ежегодник 1968 г
«Сервейер III» («Сервейер С»). Основные задачи полета: 1. Испытание ракеты-носителя «Атлас-Кентавр». Двигатели второй ступени впервые в практике запусков этих ракет должны включаться дважды: для вывода ступени с аппаратом на промежуточную геоцентрическую орбиту и второй раз для перевода с этой орбиты на траекторию полета к Луне. 2. Испытание систем, обеспечивающих коррекцию траектории аппарата на среднем участке полета, а также его мягкую посадку на Луну. 3. Получение телевизионных изображений поверхности Луны в районе посадки. 4. Изучение характеристик лунного грунта в районе посадки с помощью специального выносного механизма. Стартовый вес аппарата (рис. 8) составлял 1035 кг, после посадки на Луну - 281 кг. По конструкции и бортовому оборудованию почти полностью аналогичен предыдущим аппаратам «Сервейер». Основное отличие в том, что вместо так наз. «подлетной телекамеры» на нем установлен выносной механизм с ковшом-захватом типа грейфера, предназначенный для исследования лунного грунта (прочности, веса, сцепляемости частиц, сыпучести). Ковш-захват смонтирован на раздвижном кронштейне с максимальным выносом 163 см, с его помощью можно производить следующие операции: скрести лунную поверхность, проводить на ней борозды, рыть канавки длиной до 63,5 см, шириной до 30,5 см и глубиной до 46 см; захватывать, поднимать и переносить образцы грунта; перемалывать (челюстями ковша) и дробить (падающим с высоты ковшом) образцы грунта. Для измерения прикладываемых усилий установлены два датчика. К другим отличиям относятся: наличие на каркасе аппарата двух бериллиевых зеркал, что дает возможность получения с помощью панорамной телекамеры изображения участка под аппаратом; добавлен объем телеметрической информации о работе верньерных ЖРД, а также от датчиков ударных нагрузок при посадке на Луну и датчиков вибрации при работе тормозного РДТТ; добавлены два коммутатора в телеметрической системе.
Аппарат был запущен ракетой-носителем «Атлас-Кентавр» (запуск АС-12) с мыса Кеннеди 17 апреля в 7 час. 05 мин. Вторая ступень с аппаратом вышла на близкую к круговой промежуточную орбиту высотой ~ 166 км и двигалась по ней ~ 24 мин., после чего двигатели ступени были включены вторично и перевели ее на траекторию полета к Луне. Отделение ступени произошло в 7 час. 40 мин., ориентация аппарата по Солнцу и звезде Канопус была завершена в 16 час. 30 мин. Коррекция траектории была проведена 18 апреля, когда аппарат находился на расстоянии ~ 187 000 км от Земли. Аппарат совершил посадку на Луну 20 апреля в 0 час. 04 мин. 17 сек. в точке с координатами 2,98° ю. ш. и 23,4° з.д. в 610 км к востоку от точки посадки аппарата «Сервейер I». Скорость в момент посадки составляла 2,1 м/сек, угол с местной вертикалью - 25°. Верньерные ЖРД должны были выключиться по сигналу бортового радиолокационного альтиметра на высоте 4,2 м от поверхности Луны, но не выключились. В результате аппарат дважды подскочил и двигатели выключились только при втором подскоке. Аппарат опустился на склон небольшого кратера диаметром ~ 200 м и глубиной ~ 15 м. После посадки была произведена ориентация узконаправленной антенны на Землю, а панели с солнечными элементами - на Солнце, и началась передача изображений с разверткой 200 и 600 строк. Всего было получено 6315 изображений, передача которых на Землю закончилась 3 мая в 21 час. 55 мин. Эксперименты с использованием выносного механизма начались 22 апреля и окончились 2 мая, в ходе работ с Земли было подано 5879 команд. Наблюдение за работой механизма велось с помощью панорамной телекамеры. По мнению американских ученых, проведенные исследования показали, что лунный грунт состоит из мелких частиц, слабо связанных друг с другом, его средняя плотность 1,5 г/см3, а несущая способность (0,4- 0,5 кг/см2) достаточна, чтобы выдержать вес лунной кабины и космонавтов. Самый верхний слой грунта сравнительно непрочен (видимо, космонавты будут оставлять неглубокие следы), но с глубиной прочность возрастает.
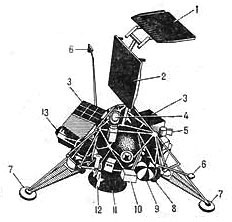
Космический аппарат «Сервейер III». 1 - панель с солнечными элементами; 2 - остронаправленная антенна; 3 - контейнер с оборудованием; 4 - телевизионная камера; 5 - датчик звезды Канопус; 6 - всенаправленная антенна; 7 - опора посадочного шасси; 8 - верньерный ЖРД; 9 - основной баллон с гелием для вытеснительной системы подачи топлива в верньерный ЖРД; 10 - вспомогательная батарея; 11 - тормозной РДТТ; 12 - выносной механизм с ковшом-захватом (на «Сервейере V» заменен альфа-анализатором); 13 - радиолокационный альтиметр и допплеровский радиолокатор. |
|
А. В. Баевский "Космические автоматические аппараты США для изучения Луны и окололунного пространства"
Космический аппарат Surveyor III (Surveyor С)
Основная цель запуска - доставка аппарата на Луну с осуществлением мягкой посдаки, получение телевизионных изображений в районе посадки и определение характеристик лунного грунта с помощью специального устройства. При этом запуске продолжалась отработка систем ракеты-носителя и бортовых систем аппарата. Запуск SC-3 аппарата произведен 17 апреля 1967 г. в 7 час. 05 мин., со стартового комплекса № 36В м. Кеннеди ракетой-носителем Atlas-Centaur AC-12. Это был первый запуск ракеты-носителя Atlas-Centaur с аппаратом Surveyor со стартового комплекса № 36В и первый запуск, произведенный ночью (2 час. 05 мин. по местному времени). Азимут запуска - 100,81°. Полет ракеты-носителя проходил по программе, близкой к расчетной. При запуске программой полета предусматривалось проведение, впервые при запусках аппаратов Surveyor, повторного включения двигателей II ступени. Согласно программе II ступень с аппаратом вышла на круговую орбиту высотой 166 км и обращалась по ней 22 мин, после повторного включения двигателей она вместе с аппаратом перешла на траекторию полета к Луне. В 7 час. 40 мин. аппарат отделился от II ступени. После выхода аппарата Surveyor С на траекторию полета к Луне он получил название Surveyor III, по международной системе обозначение 1967- 35А. В 16 час. 30 мин. была завершена ориентация аппарата по Солнцу и Канопусу. 18 апреля в 5 час., когда аппарат находился на расстоянии 187000 км от Земли, была осуществлена коррекция траектории. Верньерные двигатели проработали 4,3 сек, обеспечив расчетное приращение скорости 3,57 м/сек. Без коррекции аппарат достиг бы Луны в 468 км от расчетной точки в восточной части Океана Бурь. Потребная корректирующая скорость для компенсации промаха и обеспечения требуемой продолжительности полета составила 6,1 м/сек, только для компенсации промаха -3,9 м/сек. 20 апреля в 0 час. 04 мин. 17 сек. аппарат совершил посадку в пограничном районе Моря Познанного и Океана Бурь в точке с селенографическими координатами 2°56' ю. ш. и 23°20 з. д. в 3,8 км от расчетной точки (3,33° ю. ш. и 23°17'з. д.). Место посадки аппарата находится в 610 км к востоку от места посадки аппарата Surveyor I. Полет аппарата от момента старта ракеты - носителя до посадки на Луну продолжался 64 час. 59 мин. 17 сек. Вектор скорости аппарата при сближении с Луной составлял угол 25,6° с местной вертикалью, а скорость в момент контакта с поверхностью Луны равнялась 2,1 м/сек. Верньерные двигатели, выключаемые по сигналу радиолокационного альтиметра на высоте 4,2 м от поверхносчи Луны, не выключились. Вероятной причиной этого явилось то, что луч радиолокационного альтиметра попал на породы лунного грунта с отражающей способностью значительно более высокой, чем ожидалось. Луч многократно отразился от поверхности и в результате поступления противоречивых сигналов логика аппарата начала работать в нерасчетном режиме и заставила сработать устройство для размыкания цепи радиолокационного альтиметра. В результате этого аппарат дважды подскочил, прежде чем установился на поверхности Луны. Двигатели были выключены по команде с Земли при повторном подскоке. Высота первого подскока - 10,7 м, горизонтальная составляющая скорости в верхней точке - 0,3 м/сек, высота второго подскока - 4,3 м, горизонтальная составляющая скорости в верхней точке при втором подскоке - 0,3 м/сек расстояние между первой и второй точками касания Луны - 8,5 м. Аппарат опустился на внутренний восточный склон кратера диаметром 195 м и глубиной 15 м с углом наклона места посадки 14,7° примерно на середине длины склона кратера. В дальнейшем погружение аппарата в грунт не зарегистрировано.
После посадки аппарата произведена ориентация остронаправленной антенны на Землю, а панели с солнечными элементами - на Солнце. Через 60 мин. после посадки началась передача телевизионных изображений, переданные на Землю сигналы оказались более слабыми, чем ожидалось, На первых одиннадцати полученных изображениях видны части аппарата и поверхность под ним. К 20 апреля, за 12 час. пребывания аппарата на Луне, было получено 382 снимка с разверткой 200 и 600 строк. По телеметрическим данным, полученным непосредственно после посадки аппарата, был сделан вывод, что система энергопитания не обеспечивает достаточной мощности и активное существование аппарата на Луне будет ограничено 18-ю часами. Поэтому было принято решение немедленно начать эксперименты с выносным механизмом; однако оказалось, что телеметрические данные ошибочны, и система энергопитания обеспечивает расчетную мощность. Так как стенки кратера отражали солнечные лучи, то аппарат быстро нагревался и камеру приходилось часто выключать для охлаждения (максимально допустимая температура камеры 46°С, хотя в дальнейшем удавалось получать снимки при температуре камеры до 68°С) Качество снимков с разверткой 600 строк было хорошим, хотя некоторые снимки имели пятна из-за загрязнения зеркал лунной пылью или продуктами сгорания топлива верньерных двигателей. К 22 апреля было принято 1610 снимков с разверткой 600 строк и 53 снимка с разверткой 200 строк. 21 апреля проведено первое функциональное испытание ковша - захвата. Из сложенного полетного положения это устройство приведено в рабочее положение подрывом пиропатрона механизма крепления. Затем выносной механизм совершил повороты в горизонтальной и вертикальной плоскостях, а также выпуск и сокращение его без контакта е грунтом. 22 апреля начался эксперимент с применением выносного механизма, наблюдение за ходом эксперимента проводилось камерой.
Вначале ковш был опущен на поверхность с закрытой заслонкой и прижат к грунту с максимальным усилием. После его подъема на снимке была зафиксирована образованная ковшом вмятина в грунте. Затем была прорыта первая канавка шириной около 5 см. Ее стенки на снимке выглядели правильными, хорошо сформированными, без признаков осыпания. Далее прорыта вторая канавка такой же ширины, глубина которой была увеличена двумя дополнительными проходами до 17 см., а длина составила 38 см. В связи с ростом температуры лунной поверхности в этот период дальнейшие операции с этим устройством возобновлены утром 26 апреля. При этом была сделана попытка захватить ковшом кусок породы со дна второй канавки, но при закрытии заслонки он, по-видимому, разрушился. Захваченный ковшом материал перенесен в точку под опорой одной из посадочных ног аппарата и высыпан на ее верхнюю поверхность. 27 апреля проведено два дополнительных испытания несущей способности грунта и выкопана третья канавка вблизи одной из посадочных ног аппарата. Во время последней операции сделано 26 снимков, по одному снимку после каждого из 26 двухсекундных ходов сокращения выносного механизма, которые составили один полный ход прорытия канавки. 28 апреля ковшом был захвачен небольшой кусок породы, перенесен в район над опорой посадочной ноги аппарата, на которую ранее было высыпано некоторое количество грунта, а затем сброшен. Далее осуществлены операции по расширению третьей канавки и проведено еще одно определение несущей способности грунта. 29 апреля шесть раз определялась ударная несущая способность грунта - удары по грунту ковшом с закрытой заслонкой. Получены снимки следов этих воздействий. 30 апреля осуществлены три статических и четыре динамических определения несущей способности грунта. 1 мая ковшом поднят небольшой камень и с использованием красного, голубого и зеленого фильтров телекамерой получены его снимки. Затем осуществлено три дополнительных прохода по второй канавке и четыре динамических эксперимента со сбросом на грунт ковша с открытой заслонкой. 2 мая выкопана четвертая канавка и осуществлено три ударных сбрасывания - два с открытой и одно с закрытой заслонкой. Всего ковшом-захватом проделано 4 канавки: 1-я имела глубины 7,5 см, длину - 38 см; 2-я - глубину 17 см, длину - 38 см; 3-я - глубину 19 см, длину - 60 см; 4-я - глубину 12,7 см, длину - 25 см.
Проведено 6 экспериментов по определению статистической и 17 экспериментов по определению динамической несущей способности грунта. Всего в ходе работы с выносным механизмом с Земли подано 5879 команд, устройство функционировало в течение 18 час. 22 мин. За время работы выполнено 1898 различных движений. Суммарное время работы мотора ковша составило 42 сек., мотора разворота по азимуту - 27 сек., мотора подъема - 5 мин. 56 сек., мотора сокращения выносного механизма - 23 мин. 48 сек. При проведении эксперимента с ковшом-захватом было обнаружено, что на какое-то время вышел из строя прибор управления объективом камеры по азимуту. В связи с этим пришлось установить ковш-захват в такое положение, чтобы он попал в объектив камеры вместо того, чтобы перемещать камеру так, чтобы ковш-захват оказался в ее поле зрения. Однако позднее прибор управления по азимуту начал действовать снова. 2 мая эксперименты с выносным ковшом-захватом закончились, т. к. тень от аппарата стала затруднять наблюдение за проведением экспериментов. То обстоятельство, что аппарат совершил посадку на склоне кратера и его вертикальная ось оказалась под углом 14,7° к вертикали, значительно расширило сферу действия камеры. Это дало возможность 24 апреля полу-
тут из книги негодяи выдрали 1 лист. Позор им! Если книга есть у кого-нибудь, сканируйте и заполните дыру (стр 101-102)-Хл.
- механизм с ковшом-захватом вместо устанавливавшейся на первых аппаратах Surveyor «подлетной» телекамеры (на последующих аппаратах «подлетная» камера также не устанавливалась). Установлена дополнительная (вторая) неподзаряжаемая серебряно-цинковая батарея емкостью 800 а-ч для использования в периоды пиковых нагрузок. У посадочной ноги № 1 установлены 2 плоских бериллиевых зеркала размером 25 х 23 см и 23 x 9 см для получения камерой изображения участка, находящегося под аппаратом. В телеметрической системе дополнительно установлены 2 коммутатора, установлен ряд датчиков для увеличения объема телеметрической информации о работе верньерных двигателей, об ударных нагрузках при посадке аппарата и вибрации при работе тормознога РДТТ. Модифицировано устройство ASPP. Суммарный вес аппарата (при отделении от II ступени) - 1035 кГ, после посадки - 281,2 кГ, вес собственно телекамеры - 7,7 кГ.
Выносной механизм с ковшом-захватом предназначен для изучения характеристик лунного грунта. На рис. 20 показан кронштейн с ковшом-захватом. Механизм разработан к изготовлен Hughes Aircraft Со, его вес - 8,2 кГ. В состав механизма входят миниатюрный ковш, напоминающий по конструкции ковш экскаватора, и складывающаяся гapмошкой стрела, на которой ковш жестко закреплен. Ковш снабжен заслонкой, открывающейся и закрывающейся по командам с Земли. При поднятой заслонке открывается острая передняя горизонтальная кромка ковша, идущая по всей его ширине. Если заслонка опущена на ковш, то его передняя сторона становится плоской поверхностью площадью около 6,3 см2. Кинематическое устройство позволяет бросать ковш с высоты на грунт или подтягивать его по грунту к аппарату. Связанные с ковшом тензометры, потенциометры и акселерометры регистрируют усилия (до 90 кГ), необходимые для продвижения ковша и замедления его движения в грунте, а также другие данные, позволяющие определить механические свойства грунта. Один из датчиков установлен на кронштейне (в основном для измерения усилий в вертикальной плоскости), другой - у места крепления металлического троса к ковшу-захвату. К режущей кромке ковша-захвата жестко крепится акселерометр. Раздвижной кронштейн, на котором смонтирован ковш-захват, крепится к каркасу аппарата на высоте 38 см от основания. Крепление кронштейна к каркасу - шарнирное, в том месте, где на аппаратах Surveyor I и II устанавливалась «подлетная» телекамера. Шарнирное крепление позволяет кронштейну складываться и раздвигаться, в результате чего ковш приближается или удаляется от рамы аппарата, и совершать движения в вертикальной и горизонтальной плоскостях, перемещая в этих плоскостях и ковш. Под действием пружины складывающийся кронштейн стремится максимально раздвинуться. В сложенном или частично сложенном положении кронштейн удерживается металлической лентой, один конец которой закреплен, а другой наматывается на вал электродвигателя. По командам декодирующего устройства аппарата электродвигатель наматывает или разматывает ленту, и кронштейн с ковшом складывается или раздвигается. Манипуляции механизма осуществляются при помощи 4 электромоторов; первый электромотор связан с барабаном и обеспечивает раздвижение составного кронштейна, второй обеспечивает поворот кронштейна по азимуту, третий - движение кронштейна в вертикальной плоскости (эти электромоторы расположены на самом аппарате); четвертый - раскрытие и закрытие челюстей ковша (расположен в ковше-захвате). Моторы работают импульсами длительностью 0,1 или 2,0 сек. по командам с Земли от декодирующего устройства. Работу всех четырех электромоторов обеспечивают бортовые химические батареи аппарата при напряжении 22 в.
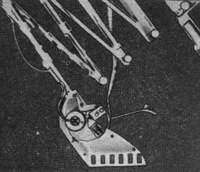
Рис. 20. Ковш-захват. |
Выносной механизм не имеет системы терморегулирования. Во избежание термической деформации конструкции механизм не должен охлаждаться ниже чем до минус 40°С, для этого аппарат должен ориентироваться так, чтобы выносной механизм был обращен на восток к восходящему Солнцу (аппарат совершает посадку вскоре после восхода Солнца в районе посадки). Для лучшего терморегулирования и большей контрастности на лунной поверхности кронштейн и ковш-захват окрашены в голубой цвет. Управляет механизмом только станция слежения системы DSIFa Голдстоуне. В период работы механизма его изображения передаются на Землю телекамерой. Выносной механизм с ковшом захвата может совершать ряд операций: проведение борозд и скребление лунной поверхности для определения прочностных характеристик грунта; захват и перенос образцов лунного грунта для определения сцепляемости отдельных частиц; поднятие образцов грунта для определения их веса; перенос образцов грунта на опору посадочной ноги № 2, которая находится в пределах досягаемости механизма, и сдув грунта струёй сжатого газа из соответствующего реактивного сопла системы ориентации для исследования его сыпучести; перемалывание образцов грунта челюстями ковша-захвата (сила сжатия челюстей 3,6 кГ);. дробление грунта и образцов грунта, перенесенного на опору посадочной ноги № 2, ударами ковша-захвата (сила удара 3,2 кГ); рытье канавок длиной до 63,5 см,. шириной до 30,5 см и глубиной до 46 см. Схема возможных перемещений выносного механизма с ковшом-захватом показана на рис. 21; максимальный вынос ковша- 163 см, угол поворота кронштейна по азимуту-112° (длина дуги поворота около 3 м), площадь лунной поверхности, охватываемая выносным механизмом - 2,23 м2, угол подъема кронштейна в вертикальной плоскости - 54°, высота подъема ковша-захвата над поверхностью (принимается горизонтальной) - 101 см, глубина опускания ковша-захвата в грунт - 46 см. Входное отверстие ковша - 5х10 см. Объем ковша - около 15 см3.
Общие расходы на создание, запуск и обеспечение полета аппарата Surveyor III составили 80 млн. долл.
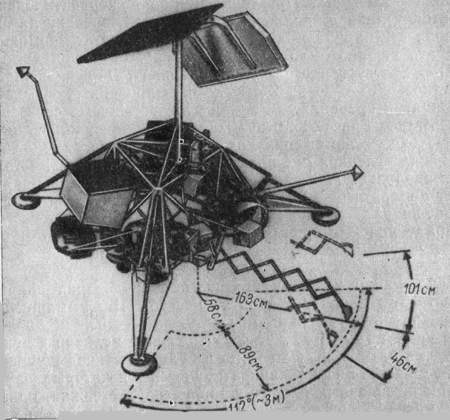
Рис. 21. Схема возможных перемещений ковша-захвата (пунктиром обведен участок, где может производиться рытье грунта).
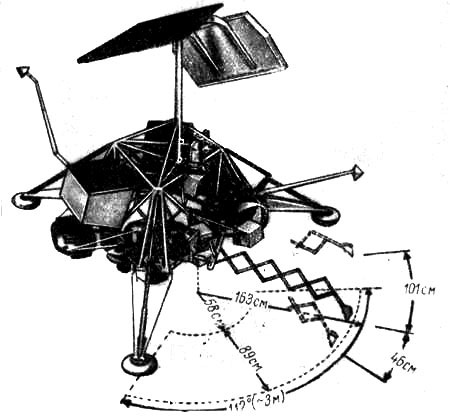
Схема возможных перемещений ковша-захвата
(пунктиром обведен участок, где может производиться рытье грунта).
С сервера НАСА
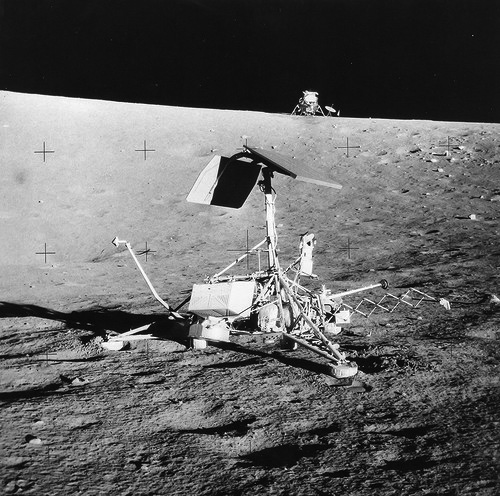
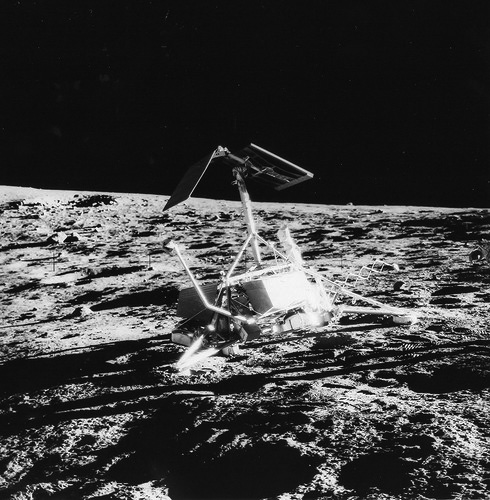
Так "Сервейер-3" выглядел на Луне
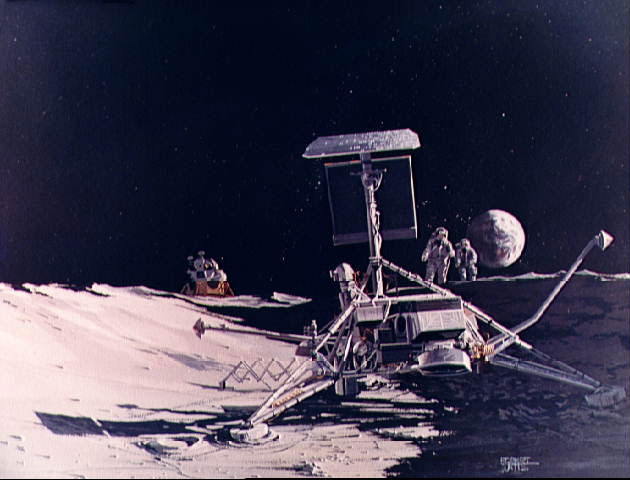
То же самое с точки зрения художника.
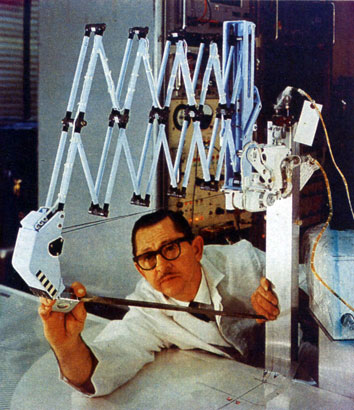
Манипулятор на испытаниях

Так делались цветные снимки