 1.1.2. АМС «M-PADS»
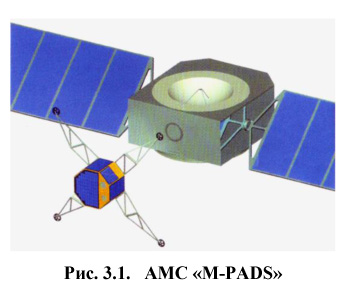
1.1.2. АМС «M-PADS»В 2004 году Эндрю Болл (Andrew Ball) и Джон Зарнецки (John Zarnecki) совместно с фирмой QinetiQ предложили для рассмотрения ESA проект АМС «M-PADS» (Mars Phobos and Deimos Survey) для исследования спутников Марса Фобоса и Деймоса.
АМС массой 310 кг, оснащенная электроионной двигательной установкой, должна была сначала выйти на орбиту вокруг Деймоса, детально обследовать его, а затем перелететь к Фобосу, где на поверхность Фобоса должен был десантироваться малый посадочный аппарат массой 16 кг.
Задачами проекта являлось:
- получение данных для уточнения происхождения спутников Марса;
- поиск аналогов Фобоса и Деймоса в поясе астероидов;
- исследование связей между Марсом и его спутниками;
- поиск летучих веществ в составе спутников Марса;
- выяснение природы «борозд» на Фобосе.
К 2007 году к проекту подключилась компания Astrium. Программа полета АМС была усложнена: посадочный аппарат должен вернуться на орбиту к основной АМС и перегрузить взятый на Фобосе образец грунта. Специалисты фирмы Astrium считали, что запуск мог бы быть выполнен в 2016 году, с длительностью полета около трех лет.
Проект был предложен на конкурс ESA и не принят, но авторы проекта считали, что Англия могла бы самостоятельно осуществить изготовление и запуск АМС.
3.1. АМС «Marconi Telecommunications Orbiter»
Итальянское космическое агентство (ASI) в 2001-2002 годах проводило с участием NASA разработку ретрансляционного спутника «Marconi Telecommunications Orbiter» (Mars ASI/NASA Telecommunications Orbiter). АМС предназначалась для выведения на орбиту спутника Марса и обеспечения передачи больших потоков информации от АМС, работающих на поверхности Марса. Запуск намечался на 2007 год.
В конце 2002 года ASI не смогло подтвердить продолжение своего участия в этом проекте, и NASA приняла решение об отдельной разработке телекоммуникационного спутника «Mars Telecommunications Orbiter», запланировав его запуск на 2009 год.
3.2. Проект «Mars ASI/NASA Science Orbiter»
Итальяно-американский проект «Mars ASI/NASA Science Orbiter» предполагал создание АМС, выводимой на орбиту спутника Марса и оснащенной радиолокатором с синтезированной апертурой для детальной радиолокационной съемки поверхности Марса. Запуск АМС планировался на 2009 год.
После того, как в конце 2002 года ASI не подтвердило свое участие в этом проекте, проект был свернут.
5.2.3. Проект «Mars Express 2»
В марте 2001 года ESA объявило конкурс на использование второй АМС типа «Mars Express», которую планировалось собрать из резервных блоков и комплектующих. На конкурс было подано 9 предложений, в том числе четыре предложения по дальнейшему исследованию Марса, одно предложение по изучению космической пыли, одно предложение по исследованию Венеры и три проекта ИСЗ для научных исследований:
- «Mars Express+» - исследования воды, климата и жизни на Марсе;
- «Mars Society» - доставка в атмосферу Марса аэростата;
- «ASR» - доставка образца атмосферы Марса;
- «MMF» - изучение эволюции магнитного поля Марса;
- «Cosmic Dune» - исследование космической пыли;
- «Venus Express» - глобальное исследование атмосферы Венеры и ее взаимодействия с поверхностью планеты и солнечной плазмой с орбиты спутника Венеры;
- EXOCAM - поиск внесолнечных землеподобных планет, проходящих по диску звезды;
- COAST - съемка планетных систем других звезд с помощью космического внеосевого коронографа;
- SPORT Express - обсерватория для исследования поляризации реликтового излучения.
В июне 2001 года предварительно были отобраны три предложения, затем окончательно был утвержден проект «Venus Express», но в 2002 году от него решено было отказаться в пользу более дешевой околоземной научной программы. Позднее после повторного рассмотрения проект «Venus Express» был все-таки принят и реализован на базе второго экземпляра АМС типа «Mars Express».
5.2.4. Проект «Radar Mapping Orbiter»
Проект АМС для исследования Марса с орбиты спутника с помощью радара, позволяющего проводить глубинное зондирование почвы. Предлагавшийся срок запуска - 2009 год.
5.2.6. Проект «ExoMars»
В ноябре 2001 года Совет ESA принял программу «Aurora» - долгосрочную программу исследования Луны, Марса и астероидов автоматическим и пилотируемыми средствами. Программа состоит из двух основных этапов:
2005-2015 г.г. - накопление научных данных, разработка и отработка технологий, необходимых для пилотируемых полетов к Луне и Марсу.
2015-2030 г.г. - подготовка и участие в международной пилотируемой экспедиции на Марс.
В октябре 2002 года было принято решение начать работы по четырем беспилотным проектам в рамках 1-го этапа программы «Aurora»:
- ExoMars - описывается ниже;
- MSRM (Mars Sample Return Mission) - см. п. 4.1.2;
- ERVC (Earth Re-entry Vehicle/Capsule) - см. п. 4.1.2.1;
- MAD (Mars Aerocapture Demostrator) - см. п. 4.1.2.1.
   |
Проект «ExoMars» предусматривал доставку на Марс самоходного аппарата и выведение на орбиту Марса спутника-ретранслятора. Главная задача проекта - поиск жизни на Марсе, существующей или существовавшей в прошлом.
Комплекс аппаратуры для биологических исследований на Марсе EMF (Exobiology Multi-user Facility - экзобиологическая многопользовательская установка) создавался ESA с 1998 года с целью использования на одной из посадочных АМС США. После пересмотра программы NASA в 2000 году такая возможность была если не потеряна, то отодвигалась в неопределенное будущее, и руководство ESA приняло решение о создании АМС для экзобиологических исследований Марса совместно с Россией.
В соответствии с достигнутыми договоренностями разделение ответственности следующее: спускаемый аппарат и марсоход создаются российской стороной (на основе российского проекта «М2»), а орбитальная АМС и основная часть научного оборудования - странами-участниками ESA.
В процессе работ проект претерпел несколько существенных трансформаций, а первоначальный срок запуска АМС - 2007 год, - передвинулся на «окно» 2009 года.
Окончательно первый вариант проекта был сформирован в 2002 году.
5.2.6.2. Исходный вариант (январь 2002 г.)
АМС «ExoMars» состоит из орбитального аппарата (ОА) и спускаемого аппарата (СА), в котором размещен марсоход.
ОА (разработка ESA) создается на основе АМС «Mars Express». Корпус ОА имеет кубическую форму размерами 2 х 2 х 2 м. ОА оснащается электрореактивной ДУ российской разработки. Масса ОА - 1 833 кг, (в том числе 1 172 кг топлива) при запуске в 2007 году или 1 711 кг (в т.ч. 1 050 кг топлива) при запуске в 2009 году. Ресурс работы ОА на орбите Марса равен 3 года.
СА (разработка России) в полетном состоянии имеет диаметр 3,0 м и высоту 1,7 м. Масса СА с марсоходом составляет 681 кг.
Отделение СА производится в апоцентре эллиптической орбиты захвата высотой 500 х 76 249 км, на которую первона-чально выходит АМС, после чего ОА должен перейти орбиту ретрансляции 500 х 8 919 км.
После баллистического торможения в атмосфере Марса производится двухэтапное раскрытие надувного тормозного устройства. Схема раскрытия тормозного устройства показана на рис. 3.34.
В качестве запасного варианта рассматривалась возможность использования парашютной системы.
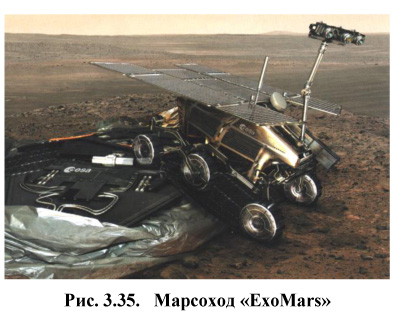
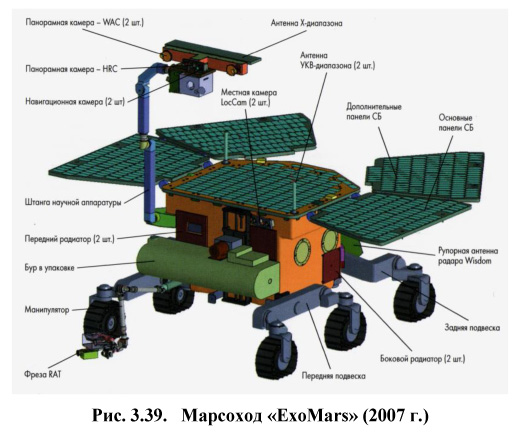
Марсоход имеет шестиколесное шасси. Энергопитание обеспечивают четыре раскрываемые панели солнечных батарей, общей площадью 2,25 м2. Планировалось использовать систему управления марсоходом, разрабатывавшуюся CNES для российского «Марсохода-1» по программе «М2» («Марс-96/98»).
На марсоходе устанавливается комплекс научной аппаратуры «Pasteur»:
- PanCam - панорамная камера PanCam на раскладной мачте высотой около 2 м;
- бур для забора образцов с глубины до 1.5-2.0 м;
- система доставки и распределения образцов;
- OCM - оптический цветной микроскоп;
- SEMS - электромагнитный подповерхностный датчик;
- LIBS - рамановский спектроскоп и лазерный спектрометр;
- Oxi-GC/MS - газовый хроматограф и масс-спектрометр;
- EMF - экзобиологическая многопользовательская установка.
Выбрана следующая схема управления движением марсохода. Марсоход будет передавать на Землю панораму окружения и получать команду, в какую точку он должен переместиться. Движение в выбранную точку будет управлять бортовой компьютер, который получив от стереокамеры снимки панорам, будет строить 3D-карту рельефа и отмечать непроходимые и труднопроходимые участки, после чего прокладывать участок маршрута. После перемещения на 2,5-5 м электронная 3D-карта будет строиться заново, и будет прокладываться очередной участок маршрута и т.д. Средняя скорость движения по такому алгоритму составит 100 м/ч. Перемещение на 2 км займет двое суток, т.к. ночью марсоход будет стоять.
Максимальный преодолеваемый уклон составляет 20°. Расчетная длительность работы марсохода на поверхности Марса составляет 180 суток. Поиск следов жизни предполагается проводить в тех местах, где можно ожидать наличия подповерхностной жидкой воды или в крайнем случае льда. Из этих соображений будет выбран район посадки. Бурение будет проводиться в точках, на которые укажет датчик SEMS. Исследования планируется провестипо крайней мере в 10-25 точках, удаленных друг от друга на 0.5-2.0 км. Общее пройденное расстояние должно составить до 30 км. Расчетное время работы марсохода на поверхности Марса - 6 месяцев.
Масса марсохода - 224 кг, в т.ч. 44 кг научной аппаратуры.
Полная масса АМС «ExoMars» составляла 2 514 кг (для запуска 2007 года) или 2 392 кг (для запуска в 2009 году).
Запуск предполагалось производить ракетой-носителем «Союз-Фрегат». При старте 12.06.09 года АМС должна была бы прибыть к Марсу 02.02.11 года и выйти на рабочую орбиту для ретрансляции данных от марсохода 25.10.11 года. Такая большая длительность полета была обусловлена использованием ЭРДУ для доразгона АМС после выведения на промежуточную орбиту ИСЗ. Прямой запуск на отлетную траекторию ракетой-носителем «Союз-Фрегат» потребовал бы снижения массы АМС, поэтому после рассмотрения возникшей проблемы проект был переработан.
5.2.6.3. Вариант 2 (июль 2002 г.)
В переработанном проекте «ExoMars» было решено отказаться от ЭРДУ, заменив ее на маршевый ЖРД тягой 40,8 кг. Для запуска было решено использовать РН «Зенит-3SL». По новому проекту график полета выглядел следующим образом:
- июнь 2009 года - старт. АМС выводится на промежуточную орбиту 200 х 163 480 км. В перигее 1-го витка включается маршевая ДУ, и АМС переходит на траекторию полета к Марсу;
- сентябрь 2010 года - прибытие к Марсу. АМС выходит на орбиту захвата 500 х 76 249 км. Через два витка в апоцентре производится нацеливание СА на траекторию спуска, отделение СА, и возврат ОА на исходную орбиту;
- ОА переходит на орбиту ретрансляции высотой 500 х 8 919 км с наклонением 90 и периодом обращения 6 ч.
- СА входит в атмосферу Марса под углом 13° со скоростью 4,8 км/с.
Позднее было объявлено, что запуск АМС «ExoMars» будет произведен РН Arian 5 ESC-A на прямую отлетную траекторию, что обеспечит прибытие АМС к Марсу в августе 2010 года. Такое изменение объяснялось намерением обеспечить больший срок работы марсохода до начала сезона пылевых бурь.
 5.2.6.4. Варианты объединения программ
5.2.6.4. Варианты объединения программ5.2.6.4.1. «ExoMars/Premier/NetLander»
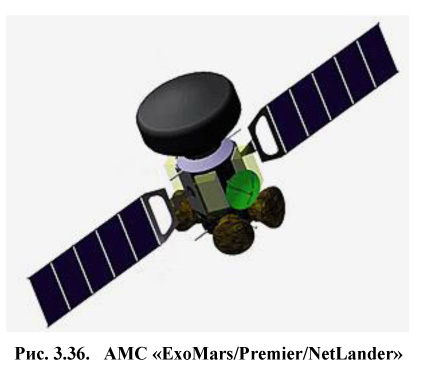
В октябре 2002 года в связи с пересмотром приоритетов, вызванным нехваткой средств, проект «Mars Premier» был близок к закрытию. В качестве альтернативного решения было внесено предложение объединить задачи проектов «Mars Premier» и «ExoMars».
АМС должна была выполнять следующие функции:
- доставка на Марс СА с марсоходом;
- доставка на Марс четырех АМС «NetLander»;
- проведение эксперимента RVD по сближению и захвату контейнера;
- ретрансляция данных от посадочных АМС.
Проектная масса АМС - 4 195 кг. Для запуска необходимо было использовать РН Arian 5 ESC-B, но ее готовность к расчетному моменту запуска была неочевидной. Планирование РН Arian 5 ESC-A для запуска этой АМС было также рискованно, т.к. резерва по грузоподъемности РН могло не хватить в случае возрастания фактической массы АМС в процессе разработки. Учитывая сложность задачи по разведению на заданные траектории пяти посадочных АМС, от комбинированного варианта было решено отказаться.
5.2.6.4.2. «ExoMars/Premier» + «NetLander»
Дополнительно был рассмотрен вариант, по которому задачи проектов «Mars Premier» и «ExoMars» частично разделяются на две АМС:
1. Тяжелая АМС «ExoMars/Premier» для доставки марсохода и отработки сближения и захвата контейнера с грунтом. Масса АМС 3 124 кг, для запуска используется РН Ariane 5 ESC-A.
2. Легкая АМС для доставки посадочных модулей «NetLander». Масса 760 кг. Запуск выполняется РН «Союз-2»
Недостатком этого варианта является то, что отделение СА с марсоходом должно производиться с подлетной траектории, а не с орбиты ИСМ, как это планировалось по проекту АМС «ExoMars», так как для вывода всей АМС на околомарсианскую орбиту энергетики маршевой ДУ было недостаточно. В связи с этим выбор района посадки марсохода становился более ограниченным. Кроме того, использование одной орбитальной АМС для ретрансляции данных, поступающих как с марсохода, так и с модулей «NetLander», вносило дополнительные ограничения на возможности программы. После проведенного анализа от такого варианта также отказались.
В итоге в конце 2002 года было объявлено о прекращении попыток объединения программ «Mars Premier» и «ExoMars».
5.2.6.5. «ExoMars» варианты 2005-2006 года
В марте 2005 года в связи с задержками финансирования проекта запуск комплекса «ExoMars» был перенесен с 2009 на ноябрь 2011 год. Как выяснилось, в этом случае АМС должна прибывать к Марсу в сентябре 2012 года, во время сезона пылевых бурь. Выходом могло было быть ожидание на орбите спутника Марса в течение полугода, только после чего в апреле 2013 года могла бы быть выполнена посадка марсохода. Позднее была найдена другая схема полета, с запуском в июне 2011 года и прибытием к Марсу в июне 2013 года.
В результате проработок было определено три варианта АМС «ExoMars»:
1. Базовый («ExoMars Lite») - запуск АМС одной РН «Союз-2.1Б»;
2. Усиленный - запуск комплекса с помощью РН Ariane 5;
3. Комбинированный - раздельный запуск орбитального и посадочного модулей двумя запусками РН «Союз-2.1Б».
5.2.6.5.1. «ExoMars Lite»
Вариант снижения массы комплекса до величины, позволяющей обойтись одной РН «Союз-2.1Б» был предложен летом 2005 года. Идея заключалась в переносе функции радиосвязи с Землей на американскую орбитальную АМС. Это позволило вместо орбитальной АМС проекта «ExoMars» использовать относительно легкую перелетную ступень, единственной задачей которой являлась бы доставка модуля с марсоходом для посадки с подлетной траектории.
Стартовая масса АМС - 3 025 кг. Масса посадочного модуля около 1 000 кг при отделении от перелетной ступени, 570 кг - после посадки.
Схема посадки выглядит аналогично посадкам американских АМС «Mars Pathfinder», «Spirit» и «Opportunity». После аэродинамического торможения лобовой экран отбрасывается, дальнейший спуск происходит на парашюте. Непосредственно перед касанием грунта парашют отбрасывается, а окончательное торможение выполняется с помощью двигателей мягкой посадки.
Марсоход имеет массу 177,5 кг, в т.ч. 12,5 кг - комплект научной аппаратуры «Pasteur».
В состав комплекта «Pasteur» входят приборы:
- панорамная видеокамера;
- инфракрасный спектрометр;
- радар для зондирования грунта на глубину до 3 м;
- узкоугольная видеокамера;
- мёссбауэрский спектрометр;
- микроскоп;
- лазерный спектрометр;
- рентгеновский диффрактометр;
- газовый хроматограф;
- масс-спектрометр;
- детектор органики и окислителей;
- «чип маркера жизни».
Наибольший интерес представляет «чип маркера жизни» LMC (Life Marker Chip), разработанный британским Университетом Лейстера с партнерами из Нидерландов, Германии и США. Прибор представляет собой микролабораторию с набором из 25 молекулярных рецепторов (антител), избирательно реагирующих на протеины и другие химические компоненты биологических организмов.
Расчетный срок работы марсохода - шесть месяцев, за это время он должен пройти не менее 10 км.
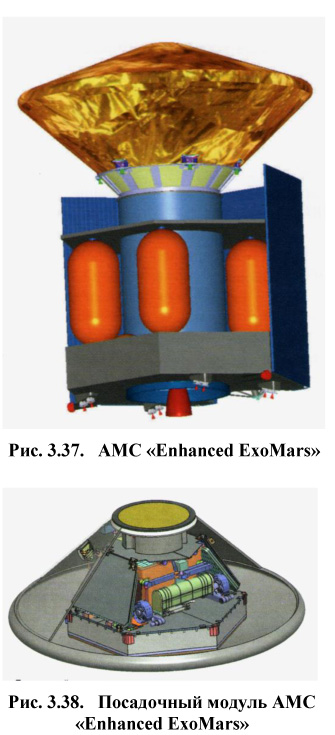
5.2.6.5.2. «ExoMars» усиленный вариант
Этот вариант АМС был разработан после отказа NASA от создания специализированного ретрансляционного спутника Марса «Mars Telecommunications Orbiter» («MTO»), о чем было объявлено в июле 2005 г. Рост массы отправляемого к Марсу комплекса потребовал использовать более мощную РН - Ariane 5.
Комплекс «ExoMars» по этому варианту состоял из перелетного и посадочного модулей. Общая масса комплекса составляла 5 000 кг. Посадочный модуль начальной массой 1 200 кг должен был доставить на Марс посадочный аппарат и марсоход. Масса марсохода - 258 кг.
На посадочный аппарат можно было установить 30 кг аппаратуры, в том числе 8,5 кг научных приборов и автономный источник питания - радиоизотопный генератор. В состав приборов планировалось включить сейсмометр, метеокомплекс, магнитометр, устройство для изучения свойств грунта на глубинах до 5 м, и другие устройства. Этот комплекс получил наименование GEP, позднее замененное на название «Гумбольдт» (Humboldt).
Масса научного комплекса «Pasteur», устанавливаемого на марсоход, могла быть увеличена до 16,5 кг. Также появлялась возможность установки 30 кг научной аппаратуры на орбитальный модуль-ретранслятор.
5.2.6.5.3. «ExoMars» комбинированный вариант
Этот вариант отличался разделением комплекса на две автономных АМС, первая из которых являлась орбитальным аппаратом, выполняющим функции ретранслятора, а вторая практически соответствовала варианту «ExoMars Lite», т.е. состояла из посадочного модуля, снабженного легким перелетным блоком.
Необходимость создания собственного орбитального ретранслятора была вызвана отказом NASA, как было сказано выше, от создания запланированной ранее АМС «MTO». Предложения использовать другие орбитальные АМС не отвечали требованиям проекта «ExoMars» по пропускной способности радиоаппаратуры этих АМС.
  |
 В 2007 году ESA определилась с выбором одного из трех вариантов АМС «ExoMars». Выбранный за основу вариант («ExoMars» усиленный) был доработан. В окончательном виде проект выглядел так.
В 2007 году ESA определилась с выбором одного из трех вариантов АМС «ExoMars». Выбранный за основу вариант («ExoMars» усиленный) был доработан. В окончательном виде проект выглядел так.АМС состоит из перелетного и посадочного модулей. Старт производится 23.11.13 г. на РН Ariane 5 или «Протон-М». Стартовая масса АМС - 4 579 кг.
Перелетный модуль обеспечивает полет комплекса по траектории Земля - Марс и выход 05.10.14 г. на околомарсианскую орбиту ожидания высотой 500 х 95 750 км и наклонением 120-160 град. Модуль имеет ДУ, состоящую из маршевого ЖРД тягой 43,2 кг и двух резервных ЖРД тягой по 22,4 кг. Масса конструкции перелетного модуля - 720 кг, запас топлива - около 2 400 кг.
На орбите ожидания АМС находится до окончания сезона пылевых бурь. В сентябре 2015 года ДУ перелетного модуля переводит комплекс на траекторию снижения, после чего перелетный модуль отделяется и разрушается в атмосфере Марса. Посадочный модуль после отделения имеет массу 1 200 кг. Масса после посадки - 600 кг. Масса доставляемого марсохода 258-265 кг, в т.ч. собственно марсоход - 205 кг, комплекс «Pasteur» - 16,5 кг. Остальную массу составляют буровое устройство и система обработки и распределения образцов грунта.
Предполагалось, что марсоход, снабженный «интеллектуальной» системой управления, способной самостоятельно принимать решение о возможности продвижения на несколько метров, сможет проходить в сутки до 1 км.
Расчетное минимальное время работы марсохода «ExoMars» - 180 суток.
В качестве орбитального ретранслятора должны были использоваться либо американские АМС, либо российская АМС «Фобос-Грунт», о чем в июне 2008 г. между ESA и Росавиакосмосом было подписано соглашение.
В октябре 2008 г. руководящим органом ESA было принято решение о переносе запуска АМС «ExoMars» по финансовым причинам на 2016 год.
5.2.6.7. «ExoMars» 2009 года (ESA+NASA)
В декабре 2009 года США заявили о готовности объединить свою программу изучения Марса автоматическими станциями с европейской. Созданная инженерная рабочая группа предложила вариант запуска на РН Atlas V в 2016 году двух АМС - европейского марсохода «ExoMars» и американского научно-ретрансляционного спутника, однако, США отвергли такой вариант по ряду причин. В результате переговоров было решено, что ESA создаст орбитальный аппарат для запуска в 2016 году и марсоход, который будет запущен в 2018 году. Доставку марсохода на поверхность Марса должен обеспечить американский посадочный аппарат. Оба запуска должны быть выполнены американскими РН Atlas V. В дальнейшей проработке состав запускаемых объектов был дополнен европейским демонстратором посадочного аппарата - в первом запуске, и американским легким марсоходом - во втором запуске.
5.3.3. Проект «European Venus Explorer1»
«European Venus Explorer»1 («EVE») - проект, рассматривавшийся ESA в начале 2000-х годов, до 2007 года называвшийся «Venus Entry Probe»2. Проект был предложен в рамках программы «Cosmic Vision» в классе M-миссий. Задачей проекта являлся поиск ответов о происхождении и истории эволюции атмосферы Венеры, а также изучение химического и физического состава облачных слоев и нижних слоев атмосферы.
1 European Venus Explorer - европейский исследователь Венеры (англ.).
2 Venus Entry Probe - погружающийся венерианский зонд (англ.).
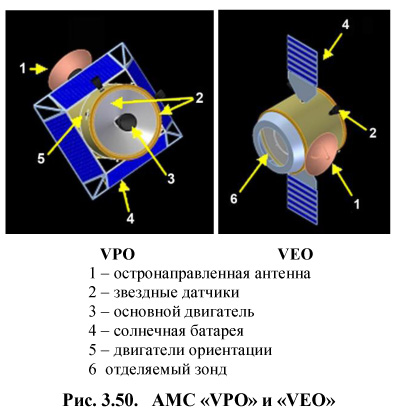
Проектом предусматривалась отправка к Венере комплекса из двух АМС: «VPO» («Venus Polar Orbiter») и «VEO» («Venus Elliptical Orbiter»).
АМС «VPO» должна была выполнять изучение атмосферы Венеры с полярной орбиты ИСВ высотой 2 000 х 6 000 км. Масса АМС «VPO» 905 кг, в т.ч. 607 кг топлива и 25 кг научного оборудования.
АМС «VEO» должна была быть выведена на высокую эллиптическую орбиту, также полярную, с параметрами 250 х 215 000 км, период обращения 117 часов. В задачу АМС «VEO» входил сброс аэростатного зонда. Зонд выполняет баллистическое торможения в атмосфере Венеры, после чего теплозащитная оболочка сбрасывается, и дальнейшее торможение выполняется с помощью парашюта. Последней операцией спуска зонда является наполнение газом аэростатной оболочки.
Аэростатный зонд, называемый в проекте аэроботом, в течение двух недель должен дрейфовать в атмосфере Венеры на высоте 55 км, сбрасывая баллистические микрозонды. Микрозонды не имеют средств торможения и производят измерения температуры, давления и освещенности в нижних слоях атмосферы в свободном падении, передавая информацию на аэробот. Планировалось доставить и осуществить сброс до 15 микрозондов.
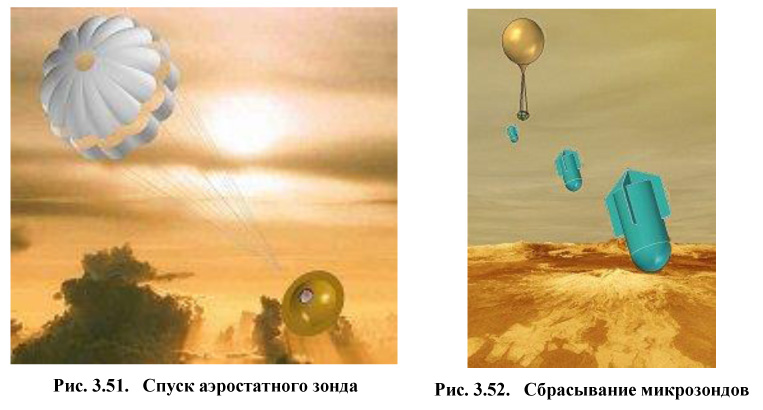
Микрозонд имеет аэродинамически обтекаемую форму и хвостовые стабилизаторы. В носовой части расположены датчики давления, температуры и освещенности. Блок электроники, питаемой от батареи, расположен в центре микрозонда. Для защиты электроники от воздействия температуры и давления внутреннее пространство заполнено вспенивающимся материалом. Антенна расположена на задней кромке хвостового стабилизатора.
Масса АМС «VEO» 558 кг, в т.ч. 229 кг топлива и 91 кг - масса аэростатного зонда.
Запуск комплекса АМС «EVE» предполагалось осуществить в 2013 году с помощью российской РН «Союз-2» с разгонным блоком «Фрегат» с космодрома Куру.
Проект не был принят к реализации.
В 2007 году обсуждался вопрос об объединении проектов России «Венера-Д» и ESA «EVE» под названием «Венера-EVE».
2.5. Исследования Меркурия
5.4.2.4. Европейско-японско-российский вариант 2003 года
В 2002 году было достигнуто соглашение, по которому в проект «BepiColombo» включалась Япония (ISAS) и Россия. Япония вместо своего проекта АМС «Mercury Orbiter» брала на себя разработку магнитосферного модуля MMO. Россия должна разработать посадочный модуль MSE и обеспечить запуск комплекса «BepiColombo» своими РН. Россия также обеспечивала выведение АМС на траекторию полета к Меркурию.
Старт двух РН «Союз-Фрегат» с АМС «BepiColombo» намечался на июнь 2011 года. Доставку модулей к Меркурию должен был обеспечить европейский разгонный блок с электрореактивной ДУ. Перелет должен занять 3,5 года. Выход АМС на орбиту спутника Меркурия обеспечивается бортовым ЖРД. Модуль MMO выводится на орбиту 11 800 x 400 км, модуль MPO - на круговую полярную орбиту высотой 1 500 км. Расчетный срок работы модулей на орбите спутников Меркурия - 1 год.
5.4.2.5. Эволюция проекта АМС «BepiColombo» (2003 - 2011 г.г.)
В ноябре 2003 года ESA снова ревизовала состав и сценарий полета АМС «BepiColombo». Было принято решение ограничиться одной РН «Союз-2.1Б» с разгонным блоком «Фрегат». В связи с более жестким ограничением по массе, возникшим вследствие такого решения, а также из-за нового объединения в один объект, пришлось пересмотреть как состав научных приборов, так и конструктивную схему всех блоков. От создания посадочного модуля MSE было решено отказаться вообще.
Срок запуска переносился сначала на сентябрь 2012 г., затем, в 2005 году, - на август 2013 г. Прибытие АМС к Меркурию по такому сценарию ожидалось в марте 2019 г.
5.5. Исследования дальних планет
5.5.3. Проект АМС «Laplace»
Проект «Laplace» был выдвинут на конкурс программы «Cosmic Vision 2005-1015» в 2007 году. Проект предусматривал создание АМС для детального изучения Европы - спутника Юпитера, - где под ледяным покровом предполагается существование океана, в котором может существовать жизнь. АМС должна была провести исследование и других спутников Юпитера, а также магнитосферы и атмосферы этой планеты-гиганта.
В 2008 году проект «Laplace» стал (с перенацеливанием с Европы на Ганимед) составной частью американо-европейского проекта EJSM (Europa Jupiter System Mission).
   |
В 2008 году ESA и NASA договорились о совместной работе по проектам исследования дальнего космоса. В январе 2009 года из двух проектов - EJSM («Europa Jupiter System Mission») и TSSM («Titan Saturn System Mission»), - был выбран к реализации проект EJSM.
По этому проекту ESA и NASA должны были создать две АМС для исследования крупнейших спутников Юпитера: ESA - АМС «JGO» («Jupiter Ganymede Orbiter») для выхода на орбиту вокруг спутника Юпитера Ганимеда, NASA - АМС «JEO» («Jupiter Europa Orbiter») для выхода на орбиту вокруг другого спутника - Европы. Эти АМС должны были быть по отдельности запущены с космодромов ESA и NASA.
По проекту, АМС «JGO» должна была нести 11 научных инструментов общей массой 77 кг. Энергопитание аппаратуры АМС должно было обеспечиваться солнечными батареями.
Запуск АМС «JGO» должен был состояться в марте 2020 года с помощью РН Arian 5. Траектория полета к Юпитеру была выбрана аналогичной траектории АМС «JEO» - один гравитационный маневр у Венеры и два у Земли. Прибытие АМС в систему Юпитера планировалось на февраль 2026 года. В мае 2028 года АМС должна была выйти на орбиту спутника Ганимеда, проводя исследования до февраля 2029 года.
В 2011 году NASA отказалась от участия в проекте EJSM из-за сокращения бюджета, в связи с чем программа создания и запуска европейской АМС «Jupiter Ganymede Orbiter» была пересмотрена.
5.5.6. Проект «TANDEM»
Выдвинутый в 2007 году на конкурс программы «Cosmic Vision 2005-1015» проект «TANDEM» («Titan AND Enceladus Mission») предусматривал создание АМС для изучения спутников Сатурна Титана и Энцелада. Основной блок должен был быть выведен на орбиту спутника Титана, после чего от него должны отделиться четыре зонда - три для посадки на поверхность Титана и аэростатный зонд для изучения атмосферных процессов.
В 2008 году проект «TANDEM» вошел, как вклад ESA, в совместный с NASA проект TSSM («Titan Saturn System Mission»). В 2009 году из двух проектов - TSSM и EJSM («Europa Jupiter System Mission»), - к реализации был выбран проект отправки АМС в систему Юпитера, в связи с чем работы по проектам TSSM и, соответственно, «TANDEM», были прекращены.
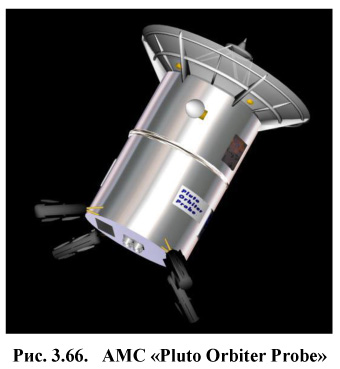
5.5.7. Проект «Pluto Orbiter Probe»
В 2004 году несколько специалистов ESA предложили запустить АМС «POP» («Pluto Orbiter Probe» - орбитальный зонд для Плутона) к Плутону для выхода на орбиту его спутника. Масса АМС была оценена в 830 кг, в том числе 270 кг ксенона и 20 кг научной аппаратуры. АМС должна иметь четыре радиоизотопных генератора и четыре ионных двигателя. Двигатели должны работать попарно - при двух работающих два являются резервными. Тяга одной пары двигателей - 0,0036 кгс при удельном импульсе 4 500 сек.
Корпус АМС представляет собой цилиндр длиной 1,85 м и диаметром 1,2 м. На переднем торце цилиндра размещена параболическая антенна дальней связи.
Для запуска АМС должна использоваться РН Arian 5. При старте в 2016 году АМС могла бы достичь Плутона в 2033 году, с использованием гравитационного маневра при пролете Юпитера в 2018 году. После захвата гравитационным полем Плутона АМС должна в течение 316 суток выполнять снижение по спирали с максимального удаления 1,5 млн. км до круговой полярной орбиты высотой 1 000 км.
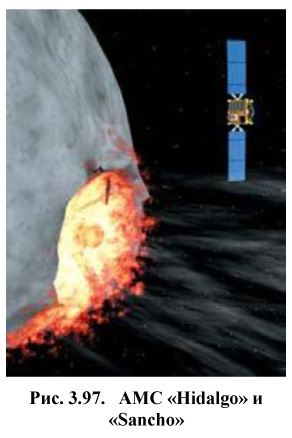
5.7.7. Проект «Don Quijote»
Задачей проекта является исследование возможности изменения орбит астероидов, угрожающих столкновением с Землей. Проект рекомендован Группой перспективных концепций ESA. Ожидалось проведение тендера в течение 2005-2006 года и выбор фирмы-победителя для реализации проекта.
В соответствии с утвержденной концепцией, должны быть созданы две АМС: «Sancho» и «Hidalgo», запускаемые одной РН «Союз-Фрегат». АМС выполняют полет по различающимся траекториям и выполняют разные миссии. Первым к выбранному астероиду прибывает АМС «Sancho», выходит на орбиту вокруг астероида и в течение 6-7 дней исследует астероид. АМС «Hidalgo» приходит к цели вторым на скорости около 10 км/с и врезается в астероид, аналогично сбрасываемому зонду-снаряду АМС «Deep Impact». Задачей «Sancho» после этого является определение масштабов повреждений астероида и отклонений от начальной траектории.
АМС «Sancho», разрабатываемая на базе АМС «SMART-1», несет следующую аппаратуру:
- телекамера для одновременных наблюдений в видимом и инфракрасном диапазонах;
- инфракрасный спектрометр;
- аппаратура для радиоконтроля орбиты;
- сбрасываемые пенетраторы с сейсмометрами, акселерометрами и датчиками температуры;
- сбрасываемые заряды для активного зондирования внутренней структуры астероида.
Масса АМС «Sancho» - 491 кг, в т.ч. масса научной аппаратуры 20,6 кг, масса топлива 96 кг.
На АМС «Hidalgo» научная аппаратура не устанавливается. Для обеспечения точного попадания на АМС устанавливается видеокамера. АМС имеет более простую ДУ (по сравнению с АМС «Sancho»), но большой запас топлива. Масса АМС - 1 694 кг, в т.ч. 1 162 кг топлива.
Обе АМС оборудуются системами автономной навигации.
26.09.05 г. ESA утвердила два астероида в качестве кандидатов в мишень для проекта «Don Quijote». Это астероиды с временными обозначениями 2002 AT4 и 1989 ML. Второй астероид уже имеет постоянный номер 10302. Окончательное решение о выборе мишени должно было быть принято в 2007 году. Старт АМС «Sancho» и «Hidalgo» мог бы состояться между 2010 и 2015 годом.
Проект «Don Quijote» не был принят к реализации, но его логическим развитием стала программа «AIDA», к работе над которой ESA приступила в 2015 году.
5.8.3. Проект «Darwin»
Цели проекта:
- обнаружение и анализ планет земного типа;
- исследование таких планет на наличие атмосферы и поиск газов, которые могут указывать на присутствие жизни;
- изучение формирования звезд, планет и галактик;
- исследование черных дыр в центре галактики.
Планировалось вывести в точку либрации L2 системы «Земля-Солнце» комплекс из восьми КА: шесть инфракрасных телескопов, центральный КА, координирующий работу шести телескопов, и КА-ретранслятор (рис. 3.104).
Суммарная масса 8 КА - 4 240 кг. Все КА «Darwin» должны быть запущены одной РН Ariane 5. После достижения точки либрации КА занимают необходимое пространственное положение, используя собственные ДУ. Для обеспечения точности перемещений необходимы отработанные технологии определения расстояний между КА с высокой точностью и перемещения КА на расстояния, измеряемые микронами. Отработку таких технологий предполагалось выполнить в полете КА «SMART-2».
Предполагавшийся срок запуска комплекса «Darwin» - 2014 год.
5.8.4. Проект «LISA»
5.8.4.1. Начальный проект
«LISA» (Laser Interferometer Space Antenna, космическая антенна для лазерного интерферометра) - совместный проект ESA и NASA, задуманный еще в 1990-е годы. Серьезная работа над проектом началась в 2001 году. Предусматривалось выведение трех КА на орбиты, близкие к орбите Земли, но отстающие на 20° (точка Лагранжа L4 системы Земля-Солнце). КА должны образовывать правильный треугольник со стороной 5 млн. км, наклоненный к плоскости эклиптики на 60°. Каждый КА должен был иметь в своем составе два пробных тела - кубы со стороной 46 мм и массой 1,96 кг каждый, из немагнитного сплава золота и платины, положение которых внутри изолированных объемов должно было измеряться с высочайшей точностью так называемым местным интерферометром. Кроме того, КА должны были выполнять измерения взаимных относительных смещений с помощью высокоточной регистрации лазерных лучей.
Целью проекта «LISA» являлось не только детектирование гравитационных волн, но и измерение их поляризации, а также определение направлений на источники этих волн.
В 2011 году NASA заявила о выходе из проекта, после чего европейские разработчики предложили вместо проекта «LISA» менее дорогостоящий проект «NGO».
5.8.4.3. КА «SMART-2»
В задачи экспериментальных АМС «SMART-2» входила отработка технологий для двух фундаментальных европейских проектов - «Darwin» и «LISA». К этим технологиям относились, в частности, двигатели микроньютонной тяги, которые должны были бы обеспечивать невозмущающее перемещение КА на микронные расстояния, а также технология определения дальности в радиодиапазоне с точностью до 1 см и более точная лазерная система, обеспечивающая точность в доли нанометра. Без их предварительного испытания реализация проектов «Darwin» и «LISA» не представлялась возможной. Планировалось запустить две АМС «SMART-2» на орбиты спутника Солнца с небольшим отставанием от Земли, либо вокруг одной из точек Лагранжа системы Солнце-Земля. Расчетная длительность функционирования - 12 месяцев.
В 2004 году проект КА «SMART-2» был переименован в «LISA Pathfinder».
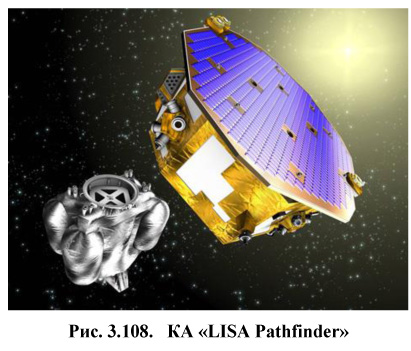 5.8.4.4. КА «LISA Pathfinder»
5.8.4.4. КА «LISA Pathfinder»КА «LISA Pathfinder» («LPF») - это технологический демонстратор для отработки технологии управления КА, способного обеспечить «свободный» полет пробной массы, а также для высокоточного измерения текущего расстояния между пробными массами, находящимися в двух разделенных отсеках КА. КА построен компанией EADS Astrium (в настоящее время - Airbus Defence and Space Ltd.).
КА «LISA Pathfinder» состоит из двух модулей - экспериментального и двигательного. В стартовой конфигурации КА имеет высоту 2,9 м, максимальный диаметр 2,1 м и массу около 1 900 кг.
Двигательный модуль конструктивно состоит из силового цилиндра, вокруг которого размещены четыре цилиндрических топливных бака. Масса модуля 1 420 кг, в т.ч. 1 200 т - запас топлива (НДМГ и тетраоксид азота) и сжатого гелия для вытеснительной системы подачи топлива. ДУ модуля включает маршевый ЖРД тягой около 41 кгс и четыре пары ЖРД ориентации тягой по 1 кгс.
Экспериментальный модуль КА «LISA Pathfinder» имеет форму восьмиугольной призмы высотой 1,0 м и максимальным поперечным размером корпуса 2,9 м. Масса модуля 480 кг, в т.ч. 57 кг - запас рабочего тела для микродвигателей, работающих на холодном газе. На верхнем торце корпуса размещена панель солнечных батарей площадью 2,8 м2, вырабатывающая электрический ток мощностью 650 Вт.
Внутри изолированного объема «в свободном полете» находится тестовый объект из сплава золота и платины - куб с ребром 4 см, - который изолирован от всех воздействий, кроме гравитационного. Сверхточные датчики отслеживают перемещения тестового объекта и выдают команды на изменение движение КА, чтобы его траектория совпадала с траекторией тестового объекта, не допуская соприкосновения объекта со стенками КА. На КА «LISA Pathfinder» размещается два таких тестовых объекта в изолированных объемах.
Запуск КА планировался на 2008 год, затем на 2010 г. Проект выдвигался на конкурс в рамках программы «Horizon 2000+»1, но из-за возросшей стоимости был перенесен в программу «Cosmic Vision 2005-2015».
Запуск КА «LISA Pathfinder» ракетой-носителем Vega был произведен 03.12.2015 г. Параметры начальной орбиты составили 206 х 1 520 км, наклонение 5,97 град. Многократными включениями маршевого ЖРД, выполнявшимися в перигее, апогей орбиты КА был поднят до высоты, достаточной для выхода на орбиту типа Лиссажу (гало-орбита) вокруг точки либрации L1 системы «Земля-Солнце».
22.01.16 г. КА «LISA Pathfinder» вышел на гало-орбиту около точки L1, после чего двигательный модуль был отброшен. В течение двух недель выполнялась стабилизация КА (экспериментального модуля) с помощью микродвигателей. 01.03.16 г. тестовые объекты были освобождены из захватов, а 09.03.16 г. ESA сообщила о начале выполнения научной программы.
07.06.16 г. ESA представила результаты первых двух месяцев работы. В них было показано что технология, разработанная для научной гравитационной обсерватории, превзошла ожидания. Два кубических объекта в центре космического корабля, находясь только под влиянием сил тяготения и не испытывая воздействий никаких других сил, позволили достичь точности измерений гравитационных возмущений, в пять раз превосходящей начальные требования.
30.06.17 г. сбор научных данных от КА «LISA Pathfinder» был прекращен в связи с исчерпанием запасов топлива. Остатков топлива хватило для перевода КА с гало-орбиты вокруг точки либрации L1 на гелиоцентрическую орбиту. 18.07.2017 года на КА была передана команда на полное выключение всей аппаратуры.
5.9. Космические телескопы
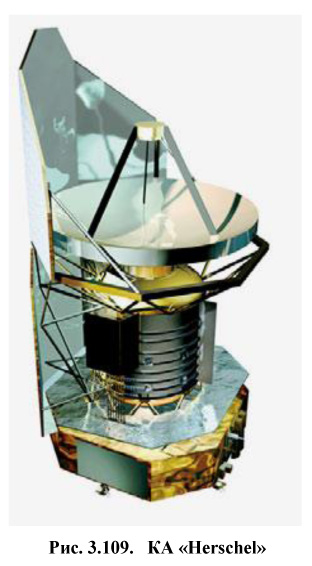  |
КА «Herschel» представляет собой инфракрасный телескоп (начальное название - FIRST, Far InfraRed Space Telescope) с системами охлаждения и служебным модулем, который обеспечивает получение команд с наземного пункта управления, точное наведение на заданный объект, стабилизацию аппарата и передачу полученной информации на Землю.
Основными задачами для КА «Herschel» являются:
- исследование формирования галактик и их эволюции на ранней стадии образования Вселенной, изучение источников энергии активных галактик;
- изучение областей формирования звезд и физики межзвездной среды Млечного пути и других галактик;
- исследование химического состава в атмосферах комет, планет и их спутников в Солнечной системе.
Основной инструмент КА «Herschel» - телескоп Кассегрена с основным зеркалом диаметром 3,5 м.
Стартовая масса КА - 3,4 т, длина - 7,5 м, поперечные размеры - 4 х 4 м.
КА «Herschel»был запущен 14.05.09 г. совместно с КА «Planck» одной РН Arian 5 ECA. КА направлен в район точки либрации L2 системы Земля-Солнце.
После почти четырех лет успешной работы запас жидкого гелия, использовавшегося для охлаждения детекторов инфракрасного излучения, был исчерпан.
Еще в июле 2012 г. было выдвинуто предложение после исчерпания ресурса направить КА на Луну - для повторения эксперимента LCROSS по поиску лунных запасов воды. При падении КА «Herschel» должен был образоваться кратер глубиной 5 м и диаметром 30 м. Предложение после анализа и обсуждения было отклонено.
13.05.2013 г. бортовые двигатели КА «Herschel» были включены для перевода КА на гелиоцентрическую орбиту. 18.06.13 г. аппаратура КА по команде с Земли была выключена.
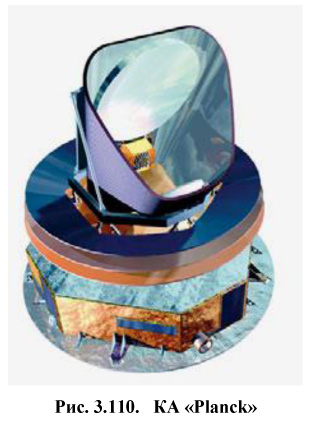 5.9.2. КА «PLANСK»
5.9.2. КА «PLANСK»КА «Planсk» (начальное название - Cobras/Samba) несет на борту инфракрасный телескоп. Размеры главного зеркала 1,9х1,5 м, размеры вторичного зеркала - 1,1х 1,0 м. Стартовая масса КА - 1,92 т, длина - 4,2 м, максимальный поперечный размер - 4,2 м. КА стабилизируется вращением со скоростью 1 об/мин.
Задачей КА «Planck» являлось исследование с высокой точностью космического микроволнового (реликтового) излучения и составление карты реликтового излучения.
КА «Planсk» был запущен 14.05.09 г. совместно с КА «Herschel» одной РН Arian 5 ECA. КА был направлен в район точки либрации L2 системы Земля-Солнце, куда прибыл в июле 2009 года. По окончании работы КА был переведен на гелиоцентрическую орбиту, и был выключен по команде с Земли 23.10.13 г.
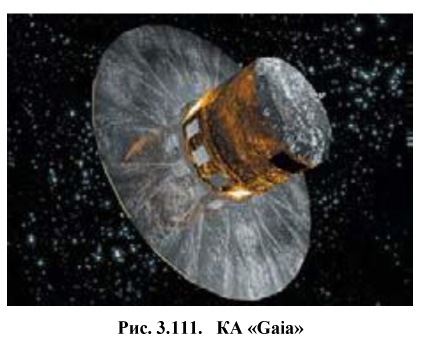
5.9.3. КА «GAIA»
«GAIA» (Global Astrometric Interferometer for Astrophysics - Глобальный астрометрический интерферометр для астрофизики) - КА, разрабатывавшийся ESA с начала 2000-х годов. КА «Gaia», имеющий на борту три телескопа, должен составить новую трехмерную карту нашей Галактики с беспрецедентной точностью, исследовав около миллиарда звезд. В пределах Солнечной системы КА должен также вести в оптическом диапазоне поиск астероидов и занептунных объектов.
КА имеет раскрываемый экран диаметром 10,2 м для защиты аппаратуры от теплового излучения Земли и Солнца. В транспортном положении КА имеет форму цилиндра диаметром 3,8 м и высотой 4,4 м. Масса КА - 2 030 кг. Энергопитание аппаратуры обеспечивается солнечными элементами, расположенными на днище КА и на раскрываемом теплозащитном экране, общая площадь солнечных батарей - 12,8 м2.
19.12.13 г. (вместо июня 2010 г. по первоначальным планам) КА «Gaia» выведен на высокоэллиптическую орбиту ракетой-носителем «Союз-ST-Б» с РБ «Фрегат-МТ».
20.12.13 г. КА начал движение по траектории выхода в точку либрации L2 системы Земля-Солнце (1,5 млн. км от Земли в сторону, противоположную направлению на Солнце). 14.01.14 г. КА «Gaia» был зафиксирован на так называемой гало-орбите в районе точки L2 с периодом около 180 суток. РБ «Фрегат-МТ» после отделения от КА «Gaia» отправлен на гелиоцентрическую орбиту.
Расчетный срок работы КА «Gaia» - 5 лет. По состоянию на середину 2020 года КА продолжал работать.
5.10.1.2. Проект КА «SMART-2»
В задачи экспериментальной АМС «SMART-2» входила отработка технологий для двух фундаментальных европейских проектов - «Darwin» (запуск в 2015 г.) и «LISA» (2011 г.). Планировалось запустить две АМС «SMART-2» на орбиты спутника Солнца с небольшим отставанием от Земли либо вокруг одной из точек Лагранжа системы Солнце-Земля.
В 2004 году проект КА «SMART-2» был переименован в «LISA Pathfinder» (см. п. 5.8.4).
5.10.3. Программа «Horizon 2000+»
Вторая долгосрочная программа космических исследований, являющаяся развитием программы «Horizon 2000». В рамках программы рассматривались проекты LISA и IXO/XEUS, но из-за роста стоимости решение об их реализации задерживалось, и оба проекта передвинулись в следующую перспективную программу.
5.10.4. Программа «Cosmic Vision 2005-2015»
Третья долгосрочная программа в области космической астрономии и исследований Солнечной системы «Cosmic Vision 2005-2015» была утверждена в мае 2002 года. Все проекты в рамках программы делятся на три класса:
- L (Large) - «флагманские» проекты большой стоимости (около 650 млн. €);
- M (Medium) - проекты средней стоимости (300 млн. €);
- S (Small) - проекты минимальной стоимости (до 50 млн. €).
Конкурс проектов был объявлен в марте 2007 года. Необходимо было выбрать для реализации два проекта - один средней стоимости и один «флагманский».
На конец 2010 года по классу «флагманский» было отобрано четыре проекта, в том числе:
- Laplace - проект АМС для детального изучения спутника Юпитера Европы (п. 5.5.3);
- TANDEM - проект АМС для изучения спутников Сатурна Титана и Энцелады (п. 5.5.6);
- LISA - проект комплекса КА для обнаружения гравитационных волн (п. 5.8.4);
- IXO/XEUS - рентгеновский телескоп.
В 2008 году между ESA и NASA было достигнуто соглашение о совместной работе по проектам EJSM (Europa Jupiter System Mission) и TSSM (Titan Saturn System Mission)2. Вкладом ESA, как составной частью, являлись проекты Laplace и TANDEM. В начале 2009 года были объявлены итоги выбора NASA между этими проектами - победителем стал проект EJSM.
Выбор международного проекта EJSM предопределил и решение ESA о «флагманском» проекте программы «Cosmic Vision 2005-2015» - им был определен проект Laplace.
Однако, в апреле 2011 года стало известно, что NASA не включила в бюджет средства на EJSM, в связи с чем вопрос о «флагманских» проектах вновь был поставлен на пересмотр, уже в рамках программы «Cosmic Vision 2015-2025».
В классе M-проектов (средней стоимости) к концу 2008 г. числилось шесть проектов:
- Cross-Scale - исследование солнечно-земных связей;
- SPICA - исследование туманностей, звезных скоплений и планетных систем (п. 5.9.7);
- Euclid - изучение далеких галактик, туманностей и звезд (п. 5.9.5);
- MarcoPolo-R - доставка на Землю образцов грунта одного из астероидов (п. 5.7.9);
- PLATO - поиск экзопланет (п. 5.9.4).
- Solar Orbiter - изучение Солнца с близкого расстояния (п. 5.6.4.8);
В феврале 2010 года ESA объявила о завершении сравнительного анализа выдвинутых проектов. К дальнейшему рассмотрению были приняты три проекта: PLATO, Euclid и Solar Orbiter, из них два должны были быть утверждены к реализации с запуском в 2017-2018 годах.
Итоги первого конкурса были подведены в октябре 2011 г. Для реализации окончательно были утверждены проекты АМС «Solar Orbiter» (миссия M1, планировавшийся срок запуска 2017 год) и космического телескопа «Euclid» (миcсия M2, планировавшийся срок запуска 2019 год).
В июле 2010 г. ESA объявила о конкурсе на миссию М3 со сроком запуска 2022 год. Из числа поданных заявок для дальнейшего анализа было выбрано четыре:
- EChO (The Exoplanet Characterisation Observatory) - КА в точке Лагранжа L2 системы Земля-Солнце для поиска признаков жизни в атмосферах экзопланет;
- LOFT (The Large Observatory For X-Ray Timing) - рентгеновская обсерватория для наблюдения «черных дыр» и нейтронных звезд;
- STE-QUEST (The Space-Time Explorer and Quantum Equivalence Principle Space Test) - для точных измерений влияния гравитации на время и материю;
- MarcoPolo-R - доставка на Землю грунта с одного из астероидов (п. 5.7.9).
В дополнение к этим четырем проектам претендентом оставался проект PLATO.
(начало тут)
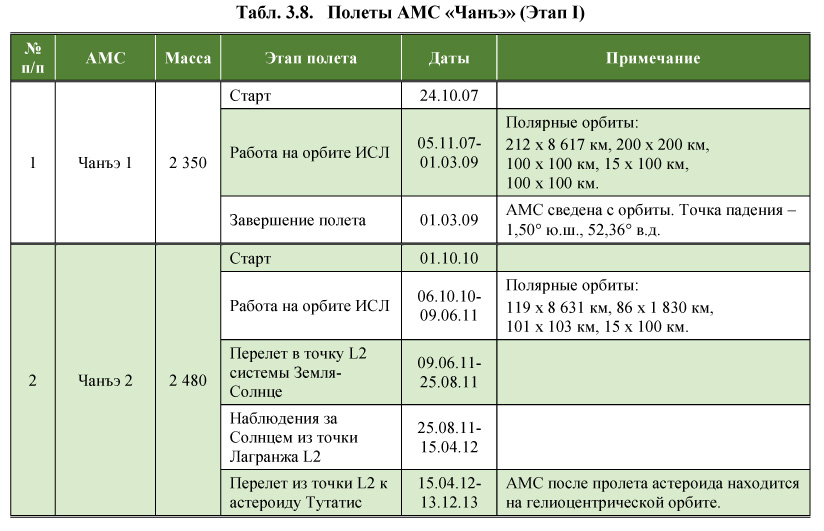
После завершения фотосъемки поверхности Луны были предприняты сверхплановые эксперименты с АМС «Чанъэ 2». Так, 09.06.11 г двигательная установка АМС была снова включена, переведя АМС на траекторию полета к точке Лагранжа L2 системы Земля-Солнце (1,5 млн. км от Земли в сторону от Солнца), куда АМС «Чанъэ 2» и прибыла 25.08.11 г.
В августе 2011 г. руководители полета сообщили, что АМС «Чанъэ 2» останется в точке L2 навсегда. Однако, позднее было решено продолжить эксперименты с АМС, т.к. запас оставшегося топлива позволял это сделать. Рассматривались варианты посещения точек либрации L1 и L4, многократных пролетов около Земли и Луны, полеты к малым телам Солнечной системы. После обсуждений было решено направить АМС к астероиду Таутатис (4179 Toutatis).
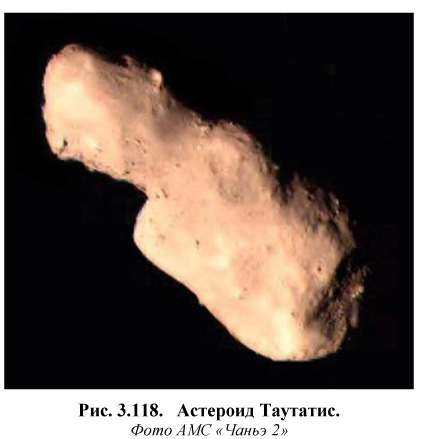
Максимальный размер астероида Таутатис - 4,6 км. Он отнесен к наиболее опасным объектам Солнечной системы, т.к. периодически сближается с Землей до очень близких расстояний, а из-за возмущающих влияний Юпитера и Земли его траектория плохо поддается расчету и прогнозированию.
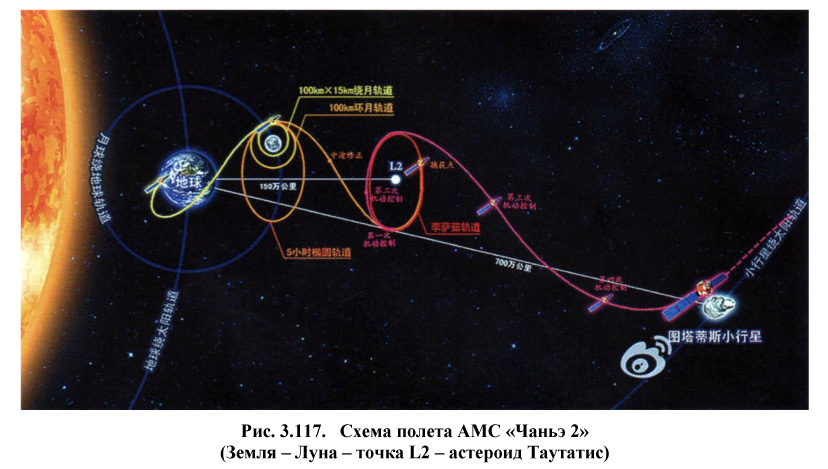
 15 апреля 2012 года АМС с помощью бортовой ДУ покинула точку Лагранжа и перешла на траекторию полета к астероиду.
15 апреля 2012 года АМС с помощью бортовой ДУ покинула точку Лагранжа и перешла на траекторию полета к астероиду.13.12.12 г. АМС «Чанъэ 2» сблизилась с астероидом Таутатис. Минимальное расстояние до поверхности астероида во время пролета составило, по уточненным данным, 770±1201 м, относительная скорость пролета - 10,73 км/с. В связи с тем, что высококачественная научная камера TDI-CCD не была рассчитана на съемку при такой скорости пролета, было решено использовать служебную камеру, предназначавшуюся для отслеживания раскрытия солнечных батарей после выведения АМС на траекторию полета к Луне. Эта камера может делать в секунду 5 снимков размером 1 024 х 1 024 пиксела с временем экспозиции 1/15 с. Было получено более 400 снимков, пригодных для изучения. Наилучшее разрешение на полученных снимках достигало 3 м.
После сближения с астероидом АМС «Чанъэ 2» продолжила движение по гелиоцентрической орбите. На конец ноября 2013 года расстояние от Земли до АМС составляло более 60 млн. км. По данным телеметрии, на этот момент бортовое оборудование АМС находилось по-прежнему в рабочем состоянии.
1 Планировавшееся расстояние до поверхности астероида при пролете - 15 км. После пролета было объявлено, что наименьшее расстояние составило 3,2 км.
6.2.2. Изучение Марса
 6.2.2.1. Проект «Инхо-1»
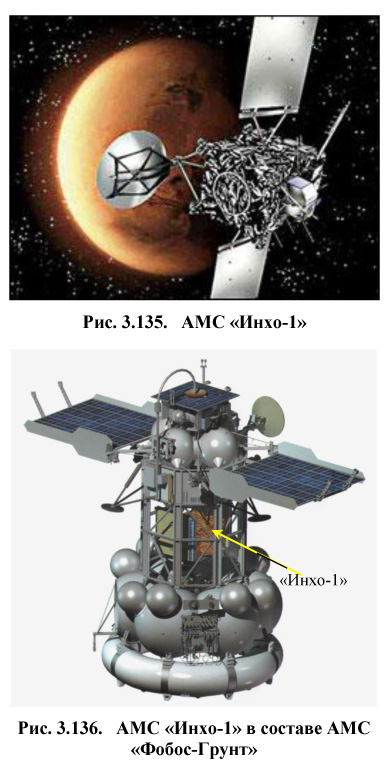
6.2.2.1. Проект «Инхо-1»«Инхо-1» («Светлячок-1») - китайская АМС, предназначавшаяся для изучения Марса с орбиты ИСМ. Разработчик - НИИ №509 Шанхайского аэрокосмического бюро.
Основные научные задачи, возлагавшиеся на АМС:
- разведка космической среды на орбите спутника Марса;
- исследование механизма исчезновения поверхностных вод Марса;
- выявление особенностей эволюции планет земной группы.
Научная аппаратура на борту АМС включала:
- анализатор электронов;
- два анализатора ионов;
- масс-спектрометр;
- индуционный магнитометр;
- двухчастотный приемник для экспериментов по просвечиванию атмосферы;
- узкоугольная CMOS-камера с полем зрения 20 х 38 и минимальным разрешением 200 м;
- широкоугольная CMOS-камера общего назначения.
Предполагалось выполнить запуск АМС «Инхо-1» на одной РН вместе с российской АМС «Фобос-Грунт». АМС «Инхо-1» должна была находиться «в качестве пассажира» в течение всего перелета и отделиться от АМС «Фобос-Грунт» после выхода на околомарсианскую орбиту с минимальной высотой 400-800 км, максимальной высотой 74 000-80 000 км и наклонением 5 град.
Размеры АМС «Инхо-1» составляли 75 х 75 х 60 см, масса 115 кг. Размах панелей солнечных батарей - 6,85 м. АМС имела трехосную систему ориентации с жидкостными микродвигателями. Расчетный срок работы АМС составлял - два года, включая время полета до Марса и год работы на орбите ИСМ.
Запуск планировался на 2009 год, но был отложен на 2011 год из-за неготовности российской АМС.
08.11.11 г. запуск АМС «Фобос-Грунт» с АМС «Инхо-1» был произведен, но из-за отказа бортовых систем АМС «Фобос-Грунт» не смогла выдать разгонный импульс и осталась на орбите ИСЗ. Полет завершился 15.01.12 г. разрушением АМС в атмосфере и падением обломков в Тихий океан.
 7.4. Исследования Венеры
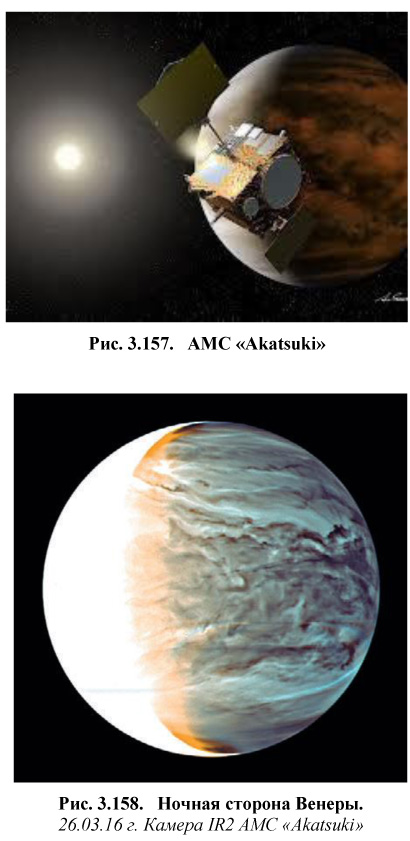
7.4. Исследования Венеры7.4.1. АМС «Akatsuki» («Planet C»)
Институт космических и астронавтических наук (ISAS) Министерства образовании Японии в 2001 году предложил проект АМС «Planet C» для вывода на орбиту спутника Венеры. Основной задачей проекта являлось изучение динамики движения венерианской атмосферы и обнаружение действующих вулканов.
АМС получила рабочее наименование «Venus Climate Orbiter», или просто «VCO».
АМС предполагалось запустить в феврале 2007 года с помощью РН М-V KM. Схема выведения включала разгон у Земли с использованием гравитационного поля Луны, выход на геоцентрическую орбиту и, после пролета Земли в июне 2008 года, переход на траекторию полета к Венере. Выход АМС на орбиту спутника Венеры предполагался в сентябре 2009 года.
На АМС должны были быть установлены несколько телекамер, в том числе работающие в инфракрасном и ультрафиолетовом диапазонах. Масса АМС должна была составить около 650 кг, в том числе 320 кг топлива.
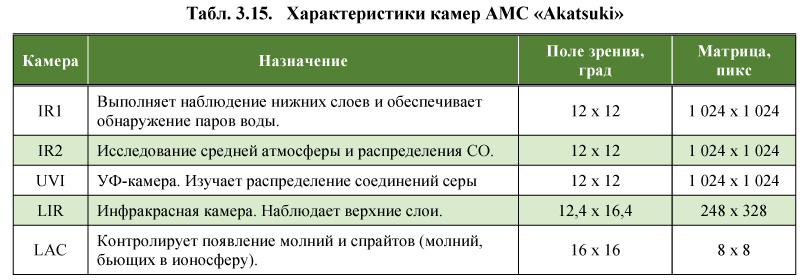
В 2005-2006 году проект был переработан. АМС «VCO» получила наименование «Akatsuki» («Рассвет», дословно - «Красная луна»). Основной задачей «Akatsuki» был определен непрерывный мониторинг атмосферных процессов Венеры с орбиты спутника планеты. АМС оснащается пятью камерами различных диапазонов - от ИК до УФ, основные параметры которых приведены в табл. 3.15.
Форма основного корпуса АМС - параллелепипед размерами 1,04 х 1,45 х 1,4 м. Масса АМС - 517,6 кг, в т.ч. масса топлива - 196,3 кг, масса научной аппаратуры -34 кг.
АМС имееет две панели солнечных батарей площадью по 1,4 м2, вырабатывающих мощность около 700 Вт. ДУ состоит из ЖРД орбитального маневрирования тягой 51 кс и 12 ЖРД ориентации, восемь из которых имеют тягу по 2,27 кгс, и четыре ЖРД - по 0,3 кгс. ЖРД орбитального маневрирования работает на гидразине и смеси окислов азота, ЖРД ориентации - однокомпонентные и работают на гидразине, без окислителя.
АМС «Akatsuki» должна была быть выведена на приэкваториальную высокоэллиптическую квазисинхронную орбиту с высотой апоцентра около 79 000 км и наклонением 172 градуса. Планировалось, что на каждом витке угловое движение КА в течении 20 часов будет практически синхронизировано с движением атмосферы Венеры, что позволит непрерывно отслеживать изменения и эволюции в структуре облачных слоев.
Расчетное время работы АМС на орбите Венеры - 4 года.
Для запуска АМС была выбрана РН Н-2А. Поскольку возможности данной РН намного превышали требуемые для запуска к Венере АМС «Akatsuki», то были предложены дополнительные полезные нагрузки:
- три университетских наноспутника, которые остаются на орбите ИСЗ;
- любительский КА UNITEC-1, который предназначен для выведения на гелиоцентрическую орбиту;
- экспериментальный КА «IKAROS» с солнечным парусом.
Запуск АМС «Akatsuki» был произведен 21.05.10 г. Вторая ступень РН с головным блоком была выведена на круговую орбиту ИСЗ высотой около 300 км. После отделения наноспутников ДУ второй ступени была включена повторно, переведя головной блок на траекторию полета к Венере. От головного блока последовательно были отделены АМС «Akatsuki», КА «IKAROS» и КА «UNITEC-1».
07.12.10 г. при пролете Венеры на расстоянии 550 км от поверхности был включен маршевый двигатель АМС для перехода на околовенерианскую орбиту. В связи с технической неисправностью ДУ проработала 2,5 мин. вместо 12 мин. АМС оказалась на гелиоцентрической орбите с параметрами 91,4 х 111,0 млн. км, наклонением 3,5 град. и периодом обращения около 203 суток. Исходя из периода обращения Венеры, АМС могла бы снова сблизиться с Венерой только через шесть лет.
После анализа неисправности выяснилось, что ЖРД орбитального маневрирования вышел из строя, и его дальнейшее использование невозможно. Специалисты JAXA рассчитали возможность выхода АМС на околовенерианскую орбиту путем гравитационного захвата, для чего требовалось обеспечить необходимые условия сближения АМС с Венерой. В течение ноября 2011 года было выполнено три коррекции траектории с использованием ЖРД ориентации, при этом ставший теперь ненужным окислитель, который использовался маршевым ЖРД, предварительно был слит за борт. Новая траектория обеспечивала сближение АМС с Венерой в ноябре 2015 года.
Сближение АМС «Akatsuki» с Венерой произошло согласно расчетам. К этому времени была рассчитана новая схема выхода АМС на околовенерианскую орбиту. 07.12.15 г. на 20 минут были включены четыре из восьми двигателей ориентации, после чего АМС вышла на эллиптическую орбиту спутника Венеры высотой 400 х 440 000 км, наклонением 3° и с периодом обращения 13 суток и 14 часов. К концу апреля 2016 года апоцентр орбиты был уменьшен до 310 000 км.
28.04.2016 года JAXA сообщила, что АМС «Akatsuki» приступила к полномасштабному выполнению программы по исследованию атмосферы Венеры.
В декабре 2016 года вышли из строя инфракрасные камеры IR1 и IR2. Выполнение программы научных наблюдений атмосферы Венеры было завершено в марте 2018 года. После анализа состояния аппаратуры АМС и колебаний орбиты под влиянием верхних слоев атмосферы и солнечной гравитации было установлено, что АМС «Akatsuki» сможет находиться на стабильной орбите не менее трех лет, в связи с чем была разработана новая программа научной работы АМС, которая должна выполняться до 2022 года и, возможно, дольше.
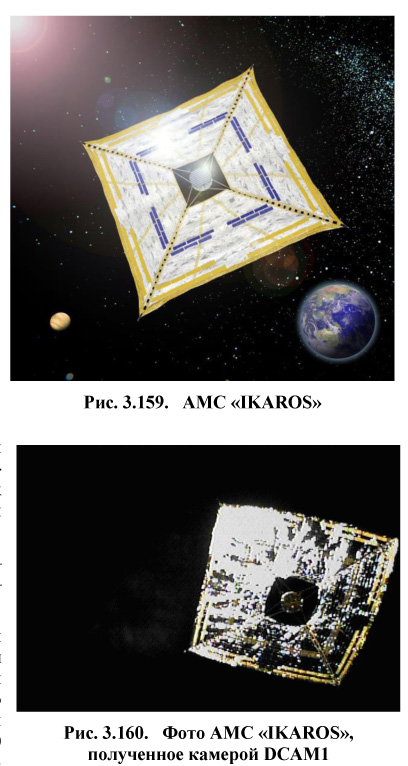 7.4.1.1. АМС «IKAROS»
7.4.1.1. АМС «IKAROS»КА «IKAROS» (Interplanetary Kite-craft Accelerated by Radiation Of the Sun - межпланетный аппарат, движимый излучением Солнца) является первым в мире космическим аппаратом с солнечным парусом. КА запущен 21.05.10 г. вместе с АМС «Akatsuki» и КА «UNITEC-1», одной РН H-2A.
Назначение КА «IKAROS» - отработка технологии перемещений в пространстве с помощью солнечного паруса и испытание тонкопленочных фотоэлектрических преобразователей - парус одновременно является и солнечной батареей. На этапе выведения КА парус находился в сложенном состоянии, в виде цилиндра высотой 0,8 м и диаметром 1,6 м. В составе бортовой аппаратуры КА, кроме устройств развертывания и закрутки паруса, находится радиосистема для связи с Землей, счетчик пылевых частиц и две отделяемые фотокамеры DCAM1 и DCAM2. Фотокамеры представляют собой цилиндры диаметром и высотой по 6 см, снабженные радиопередатчиками для передачи полученных изображений на КА «IKAROS», который ретранслирует снимки на Землю.
Стартовая масса КА - 290 кг, в т.ч. 13 кг - собственно парус, 2 кг - концевые грузы, 20 кг - запас сжатого газа для управляющих сопел.
После отделения от РН КА закручивается для стабилизации и задействования системы развертывания. Концевые грузы под действием центробежных сил растягивают парус до его штатной конфигурации. В развернутом состоянии парус представляет собой квадрат со стороной 20 м. В рабочем положении КА «IKAROS» вращается со скоростью 1-2 об/мин. Процесс раскрытия паруса был начат 03.06.10 г., а полностью парус был развернут 10.06.10 г. После развертывания паруса были поочередно отделены фотокамеры DCAM1 и DCAM2, которые засняли состояние развернутого паруса.
КА достиг окрестностей Венеры 12.12.10 г., после чего продолжил полет по гелиоцентрической орбите с периодом обращения около 10 месяцев. Энергии, генерируемой солнечной батареей на парусе, хватает для работы передатчика только в течение трех месяцев на каждом витке, в части траектории, наиболее близкой к Солнцу, в остальное время аппаратура АМС находится в «спящем» состоянии. Так, в апреле 2015 года КА «IKAROS» в пятый раз перешел в «спящий» режим.
 7.4.1.2. КА «UNITEC-1» («Shin'en»)
7.4.1.2. КА «UNITEC-1» («Shin'en»)Первый в мире студенческий межпланетный КА «UNITEC-1» (UNISEC Technology Experiment Carrier-1) разработан японским межуниверситетским консорциумом UNISEC.
КА не имеет системы ориентации и предназначена для оценки нескольких вариантов бортовых компьютеров, разработанных университетами Японии. Размеры КА 30 х 30 х 35 см, масса - около 21 кг. В состав оборудования входят управляющий компьютер, шесть экспериментальных бортовых компьютеров, датчик радиации и радиосистема. Энергопитание аппаратуры обеспечивается солнечными батареями, размещенными на сторонах кубического корпуса.
Запуск КА произведен 21.05.10 г. вместе с АМС «Akatsuki» и КА «IKAROS», одной РН H-2A. После запуска КА «UNITEC-1» получил наименование «Shin'en» («Бездна»). Ожидалось, что КА «Shin'en» проработает около 200 суток, но, к сожалению, 22.05.10 г., менее, чем через сутки после старта, связь с АМС прервалась, когда расстояние от АМС до Земли составляло около 320 000 км. В декабре 2010 года КА пролетел около Венеры.
7.5. Исследования Меркурия
7.5.1. Проект «Mercury Orbiter»
Япония (ISAS) планировала в августе 2009 года запустить к Меркурию АМС с условным наименованием «Mercury Orbiter». Проект был отменен, вместо него было решено, что Япония будет участвовать в проекте ESA «BepiColombo» (запуск комплекса АМС к Меркурию»).
Согласно финальному варианту проекта, Японское агентство аэрокосмических исследований JAXA разработало и изготовило орбитальный аппарат MMO (Mercury Magnitospheric Orbiter), который входит в состав АМС «BepiColombo», и полет от старта до прибытия к Меркурию совершает, присоединенным к европейскому модулю MPO. Размеры модуля MMO 1,1 х 1,8 м, масса 255 кг.
По японской традиции, после успешного старта АМС «BepiColombo» модуль MMO получил имя собственное - «Mio», в переводе с японского - «водный путь». Как объясняют разработчики, это название символизирует, что АМС будет пробиваться сквозь солнечный ветер, как парусники Земли плыли через океан, борясь с ветрами.
Запуск АМС «BepiColombo» ракетой-носителем Ariane 5 состоялся 20.10.2018 года. АМС выполнила гравитационный маневр при пролете вблизи Земли, и еще должна выполнить два пролета Венеры и шесть сближений с Меркурием, и только в декабре 2025 года должен состояться выход комплекса на орбиту спутника Меркурия, разделение модулей и начало автономного исследования Меркурия.
Подробное описание АМС «BepiColombo» и плана полета приведено выше.
7.6. Исследования внешних планет
7.6.1. Проект АМС «SOP»
В 1980 году была опубликована информация, что Япония изучала вопрос создания и запуска в 1988 году к Сатурну АМС «SOP» (Saturn Observation Probe - аппарат для наблюдений Сатурна). Никаких подробностей о проекте не сообщалось.
7.6.2. Проект АМС «JMO»
В 2009 году NASA и ESA договорились о создании двух АМС по общему проекту EJSM1, которые должны были исследовать спутники Юпитера, Европу и Ганимед. Япония предложила создать АМС «JMO» («Jupiter Magnetospheric Orbiter») для исследования магнитосферы Юпитера. Запуск японской АМС мог бы быть выполнен европейской РН вместе с создаваемой ESA АМС «JGO» в 2020 году. Прибытие АМС в систему Юпитера ожидалось в 2025-2026 годах. Когда в 2011 году NASA вышла из проекта, работы по АМС «JMO» были прекращены.
 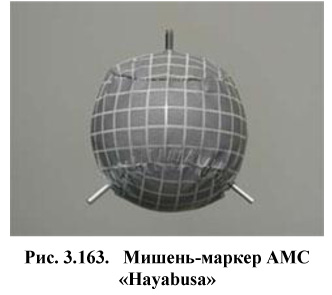  |
7.7.1. АМС «HAYABUSA» («Muses-C»)
АМС «Muses-C» разработана под управлением JAXA (Japan Aerospace eXploration Agency - Японское агентство аэрокосмических исследований) для доставки на Землю образцов грунта с астероида.
Первоначально целью полета был астероид 4460 Нереус. План полета выглядел следующим образом:
07.01.02 г. - старт на РН M-V;
09.09.03 г. - прибытие к Нереусу;
09-10.03 г. - исследование астероида, высадка наноровера SSV2, забор образцов грунта;
11.11.03 г. - старт АМС к Земле;
28.01.06 г. - посадка на Землю капсулы с образцами грунта.
Из-за задержки в разработке запуск был перенесен, и было решено, что АМС полетит в июле 2002 г. к астероиду 10302 (1989 ML), однако, в связи с выявившейся потребностью доработки РН M-V, запуск в 2002 г. стал невозможным. Окончательной целью полета АМС стал астероид 1998 SF36, со сроком старта в конце 2002 г.
2 SSV - Small Science Vehicle, - небольшой научный аппарат (англ.).
По исходному проекту АМС «Muses-C» состояла из основного блока и возвращаемого аппарата. Планировалось также оснастить АМС самоходным наноровером «Muses-CN», который должна была разработать NASA. В окончательный проект вместо американского наноровера был включен посадочный зонд «Minerva», разработанный японскими специалистами.
Основной блок АМС имеет квадратное основание 1,5 х 1,5 м и высоту 1,05 м. На корпусе блока закреплены две панели солнечных батарей общей площадью 12 м2 и остронаправленная антенна диаметром 1,5 м. Размах панелей солнечных батарей - 5,7 м. В систему энергопитания кроме солнечных батарей входит также никель-металлогидридный аккумулятор. Основная двигательная установка АМС состоит из четырех ионных двигателей, использующих ксенон в качестве рабочего тела. Каждый двигатель обеспечивает максимальную тягу 0,00078 кгс. Двигатели рассчитаны на попарное включение. Удельный импульс двигателей - 2 980 с, суммарный запас характеристической скорости, обеспечиваемый запасом топлива - 4 000 м/с. Для маневрирования АМС снабжена также химическим ЖРД, работающим на гидразине и тетраоксиде азота. Тяга маневровой ДУ составляет 2,27 кгс. Ориентация АМС осуществляется с помощью 12 ЖРД тягой по 0,45 кгс.
Масса АМС - 530 кг, в т.ч. масса конструкции - 415 кг, масса топлива бортового ЖРД - 50 кг, запас ксенона для электрореактивной ДУ - 65 кг. Запуск выполнялся РН M-5.
Возвращаемый аппарат (ВА) имеет диаметр 40 см и высоту 25 см. Масса ВА - около 20 кг. Передняя часть ВА покрыта абляционной теплозащитой.
В состав научной аппаратуры основного блока входят:
- камера AMICA (Asteroid Multi-Band Imaging Camera) с ПЗС-матрицей;
- инфракрасный лазерный дальномер LIDAR (Light Detection and Ranging);
- спектрометр ближнего ИК-диапазона NIRS (Near Infrared Spectrometer);
- рентгеновский флуоресцентный спектрометр XFS (X-ray Fluorescence Spectrometer).
Устройство для сбора образцов грунта представляет собой коническую трубу с диаметром широкого конца около 40 см. Сбор грунта производится следующим образом:
a) сначала на поверхность астероида в выбранную точку сбрасывается мишень-маркер, представляющая собой мешок из светоотражающего материала, заполненный сыпучим материалом. Мишень используется как маяк для точных измерений положения и движения АМС относительно поверхности астероида. Мишень несет также небольшую пластину с выгравированными 880 000 именами землян, заплативших за право отправки своего имени на астероид Итокава. АМС несла три таких мишени;
b) АМС снижается над выбранным участком поверхности;
c) через заборную трубу производится выстреливание в грунт металлического снаряда массой 5 г (10 мм в диаметре) со скоростью 200-300 м/с, который при попадании в поверхность астероида выбивает небольшой кратер;
d) частицы грунта, выброшенные при ударе снаряда, попадают в заборную камеру и перегружаются в ВА.
Всего в трех точках забора планировалось собрать около 1 г грунта.
После взятия образцов грунта и загрузки его в ВА АМС должна была быть переведена на траекторию полета к Земле. На расстоянии 300 000-400 000 км от Земли ВА должен отделиться от АМС и войти в атмосферу Земли на скорости около 13 км/с. Планировалось, что ВА совершит парашютную посадку недалеко от австралийского полигона Вумера.
План полета выглядел так:
- конец 2002 г. - старт;
- май 2004 г. - пролет Земли с выполнением гравитационного маневра;
- сентябрь 2005 г. - сближение с астероидом;
- январь 2006 г. - старт к Земле;
- июнь 2007 г. - посадка возвращаемой капсулы.
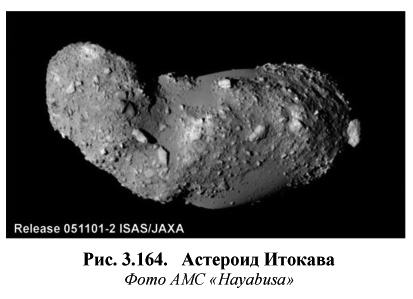
Позже срок запуска АМС был еще раз перенесен, на этот раз уже на 2003 год. Траектория полета была откорректирована, АМС по-прежнему должна была сближаться с астероидом 1998 SF, уже получившим к этому времени имя Итокава (25 143 Itokawa), но срок прибытия к астероиду удалось сохранить - осень 2005 года.
Запуск АМС «Muses-C», получившей после запуска название «Hayabusa» (в переводе с японского - «Сокол»), был произведен 09.05.03 г. ракетой-носителем M-V KM. Перевод АМС на траекторию встречи с астероидом Итокава выполнялся с помощью ионных двигателей. АМС, двигаясь по расчетной траектории, 19.05.04 г. совершила пролет мимо Земли на расстоянии 3 725 км. Прибытие АМС к астероиду состоялось 12 сентября 2005 года. Еще задолго до прибытия, 31.07.05 г. произошел отказ одного из трех гироскопов системы ориентации, но специалисты JAXA заявили, что это не повлияет на выполнение программы полета. Вскоре после сближения с астероидом - 03.10.05 г., - вышел из строя второй гироскоп.
Сблизившись с астероидом, АМС «Hayabusa», в соответствии с программой, не выходила на орбиту вокруг него, а продолжала двигаться по гелиоцентрической орбите «параллельным курсом» на расстоянии 20 км от астероида. АМС проводила съемки поверхности астероида в течение полутора месяцев. По результатам съемки были выбраны два (вместо трех по первоначальному плану) места для забора грунта.
04.11.05 г. была выполнена репетиция спуска АМС к поверхности астероида. Спуск происходил в автоматическом режиме - всей операцией управлял бортовой компьютер. Снижение было прервано на высоте 700 м по команде компьютера в связи с обнаружением условий сближения, не соответствующих расчетным.
Вторая репетиция спуска была выполнена 09.11.05 г. Компьютер устойчиво управлял движением АМС, отслеживая вращение астероида. Спуск до высоты 70 м был выполнен дважды. При одном из спусков на астероид была сброшена мишень.
12.11.05 г. при имитации спуска был неудачно сброшен посадочный зонд «Minerva». Сброс выполнялся по команде с Земли, в то время как спуском управлял бортовой компьютер. По несчастливому совпадению, команда на сброс пришла на борт АМС в тот момент, когда компьютер начал отход от астероида. Отделившийся зонд не опустился на астероид, а стал спутником Итокавы. Существует вероятность, что спустя какое-то время зонд все-таки упадет на поверхность астероида.
20.11.05 г. была предпринята первая попытка посадки на астероид. Снижение производилось в точке, где ранее была сброшена мишень. Непосредственно перед снижением до минимальной высоты связь с АМС была прервана, всеми действиями руководил бортовой компьютер. Впоследствии по анализу телеметрии было установлено, что касание произошло со скоростью 10 см/с, причем дважды, после подскока АМС на небольшую высоту. Предполагается, что АМС могла удариться о поверхность астероида заборным раструбом, либо концами панелей солнечных батарей. После второго касания АМС «Hayabusa» некоторое время находилась на поверхности астероида, но устройство забора грунта не включилось, т.к. не сработал датчик касания грунта. После 30 минут ожидания бортовой компьютер выдал команду на аварийный взлет. Так был произведен первый в мире взлет КА с астероида (первую посадку выполнила 12.02.2001 г. американская АМС «NEAR»1. - на астероид Эрос)
26.11.05 г. была выполнена вторая посадка на астероид в той же точке, что и первая, в связи с чем новую мишень было решено не сбрасывать. Все операции прошли успешно. Было сообщено, что устройство забора грунта было приведено в действие - сделано два «выстрела», однако, как выяснилось позднее, пиротехническое устройство осталось заблокированным, и «выстрелов» не было сделано.
АМС в соответствии с программой выполнила отлет от астероида, но в это время вышел из строя один из двигателей ориентации, причем началась утечка рабочего тела - гидразина. Нарушилась ориентация АМС, в связи с чем прекратилось поступление электроэнергии от солнечных батарей. 04.12.05 г. удалось восстановить ориентацию АМС с помощью газовых сопел нейтрализаторов, через которые по командам с Земли стравливался ксенон - рабочее тело ионных двигателей. АМС была закручена со скоростью 1/6 об/мин - для сохранения ориентации солнечных батарей на Солнце. Однако, 08.12.05 г. произошел выхлоп гидразина, отчего АМС стала неуправляемо вращаться, связь с Землей была утеряна. Команды с Земли также не проходили на борт АМС.
14.12.05 г. руководители программы «Muses-C» объявили, что возвращение АМС в запланированный срок отменено из-за технических проблем, АМС остается около астероида Итокава до следующей возможной даты старта к Земле, которая наступит только в 2007 году. Японские специалисты надеялись, что АМС сохранит работоспособность до этого времени, а с техническими неполадками удастся справиться.
Действительно, аппаратура АМС продолжала работать в автономном режиме, и 23.01.06 г. специалисты JAXA уловили немодулированный сигнал бортового радиомаяка АМС «Hayabusa», а 26.01.06 г. удалось включить режим опроса состояния АМС. Было установлено, что АМС вращается со скоростью 7 град/с в направлении, обратном заданному перед потерей связи, при этом остронаправленная антенна отклонена почти на 70° от направления на Землю. Литий-ионные аккумуляторы частично вышли из строя, запасы горючего и окислителя маневровой ДУ равны нулю. На борту осталось от 42 до 44 кг ксенона, чего должно было хватить на разгон АМС к Земле, при условии, что ионные двигатели работоспособны, и что система астронавигации также не вышла из строя.
06.02.06 г. в бортовой компьютер была передана новая программа ориентации, и АМС стала медленно изменять свое положение. Постепенно удалось изменить направление оси вращения таким образом, чтобы солнечные батареи были постоянно освещены, и сохранялась устойчивая радиосвязь с Землей. В апреле и мае 2006 года проводилось прогревание элементов конструкции АМС для полного выпаривания остатков гидразина, который мог бы снова нарушить ориентацию АМС при выполнении ответственных операций. В мае-июне были проверены два из четырех ионных двигателей. Как выяснилось, их характеристики не ухудшились. Проверка третьего двигателя была отложена до января 2007 г., когда АМС должна была находиться ближе к Солнцу. Четвертый двигатель находился в резерве с самого начала полета. Были проверены отдельные элементы литиево-ионных аккумуляторов, начата зарядка неповрежденных элементов.
Позднее было установлено, что работоспособны только два электрореактивных двигателя из четырех. 25.04.07 на АМС была выдана команда начать разгон на одном ЭРД. 18.10.07 г. ЭРД был выключен, чем был закончен первый этап разгона. 04.02.09 г. был начат второй этап разгона. Два ЭРД должны были поочередно работать до марта 2010 г., однако 13.08.09 г. из-за сбоя в системе ориентации АМС начала вращаться, выключив ЭРД. После восстановления ориентации из-за большого удаления от Солнца и нехватки по этой причине электроэнергии ЭРД снова были включены лишь 26.09.09 г. До 04.11.09 два работавших попеременно ЭРД вышли из строя. Была придумана схема, в которой использовался источник ионов одного двигателя, а нейтрализатор - от другого ЭРД. 19.11.09 г. такой «комбинированный» двигатель был запущен, и АМС продолжила разгон для выхода на траекторию «попадания» в атмосферу Земли. 27.03.10 г. разгон был завершен.
Коррекции траектории, которые обеспечили бы попадание ВА в «коридор входа» и посадку в заданном районе, штатно должны были проводиться с помощью ЖРД. В связи с отсутствием работоспособного ЖРД, в период с 01.05.10 г. по 09.06.10 г. было проведено четыре включения «комбинированного» ЭРД. 13.06.10 г. возвращаемый аппарат АМС «Hayabusa» вошел в атмосферу Земли и совершил посадку на полигоне Вумера в Австралии на расстоянии 1,1 км от расчетной точки приземления. Основной блок АМС сгорел при входе в атмосферу.

После исследования возвращаемого аппарата было сообщено, что в ловушке приемного устройства, куда должны были попасть частицы астероидного грунта, было обнаружено около 1 500 частиц размером 10 мкм и менее. Анализ, проведенный японскими специалистами, показал, что это действительно частицы вещества астероида Итокава.
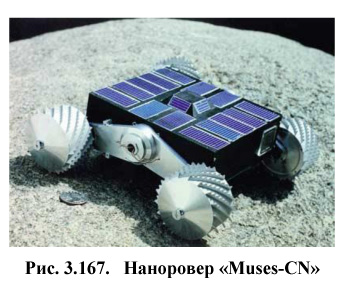  |
В первоначальном проекте планировалось сбрасывание с АМС «Muses-C» с малой высоты на астероид наноровера «Muses-CN». Разработку наноровера вела лаборатория NASA JPL (США).
Научное оборудование на ровере:
- телекамера;
- инфракрасный спектрометр;
- альфа-рентгеновский спектрометр.
Масса наноровера - 1,2 кг. Питание наноровера осуществляется от солнечных элементов, которые покрывают корпус со всех сторон. Шасси ровера выполнено в виде четырех колес на поворотных стойках, что позволяет, управляя поворотом стоек, направлять телекамеру вниз или вверх.
Расчетный срок работы наноровера - 1 месяц.
В окончательном варианте комплектации АМС наноровер «Muses-CN» был заменен на посадочный зонд «Minerva» японской разработки.
7.7.1.2. Посадочный зонд «Minerva»
Посадочный зонд «Minerva» (MIcro/Nano Experimental Robor Vehicle for Asteroid) разработан специалистами ISAS и оснащен стереокамерами, термометром и пенетраторами («иглами») для исследования физических характеристик грунта. Зонд снабжен устройством для «подпрыгивания» на поверхности астероида. Электропитание аппаратура зонда получает от солнечных батарей, покрывающих корпус.
Зонд входил в состав АМС «Hayabusa», запущенной 09.05.03 г. к астероиду Итокава. 12.11.05 г. при имитации спуска АМС «Hayabusa» к поверхности астероида зонд «Minerva» был сброшен, но неудачно, отделившийся зонд не опустился на астероид, а стал спутником Итокавы.
    |
Еще до возвращения АМС «Hayabusa» руководители проекта обсуждали возможность изготовления еще одной аналогичной АМС, усовершенствованной с учетом полученного опыта, с целью получения образцов вещества астероида класса C. Кроме того, обсуждалась (в 2007 г.) возможность создания более сложной АМС, оборудованной установкой для бурения и способной доставить колонку грунта с двух астероидов за один полет.
  |
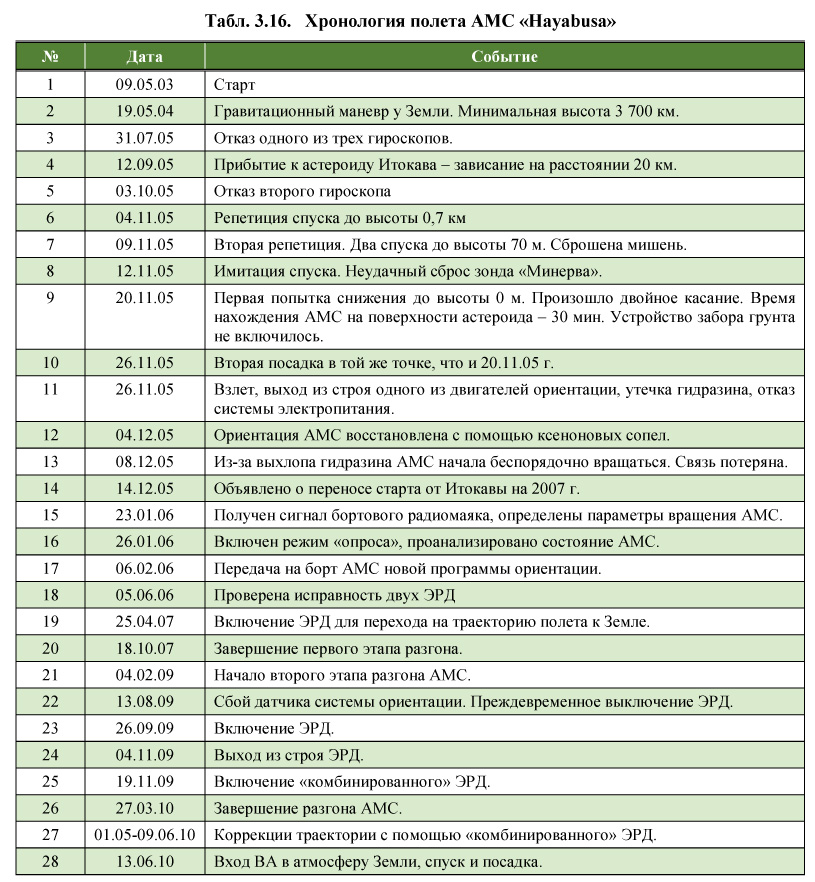
АМС «Hayabusa 2» представляет собой комплекс, в состав которого входят:
- базовый блок;
- возвращаемая капсула;
- малый посадочный зонд «MASCOT» (Mobile Asteroid Surface sCOuT - мобильный разведчик поверхности астероида);
- мини-роверы «Minerva II»;
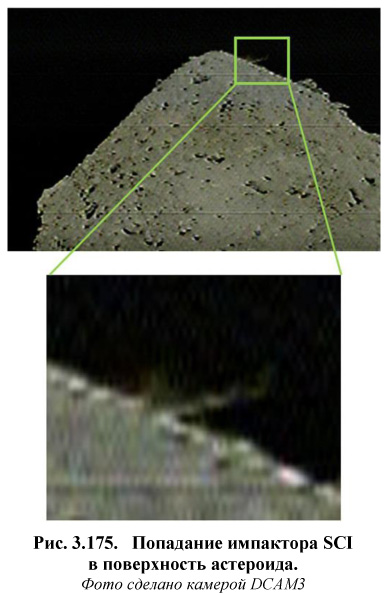
- малый импактор SCI (Small Carryon Impactor);
- отделяемая телекамера DCAM3;
- пять посадочных мишеней-маркеров.
Импактор SCI несет заряд взрывчатого вещества массой 4,5 кг и медный снаряд. Общая масса импактора - 15 кг.
В оборудование базового блока АМС входят:
- инфракрасный спектрометр ближнего ИК-диапазона NIRS3 (Near InfraRed Spectrometer);
- камера теплового ИК-диапазона TIR (Thermal InfraRed imager);
- механизм для отбора проб грунта SMP (SaMPler horn).
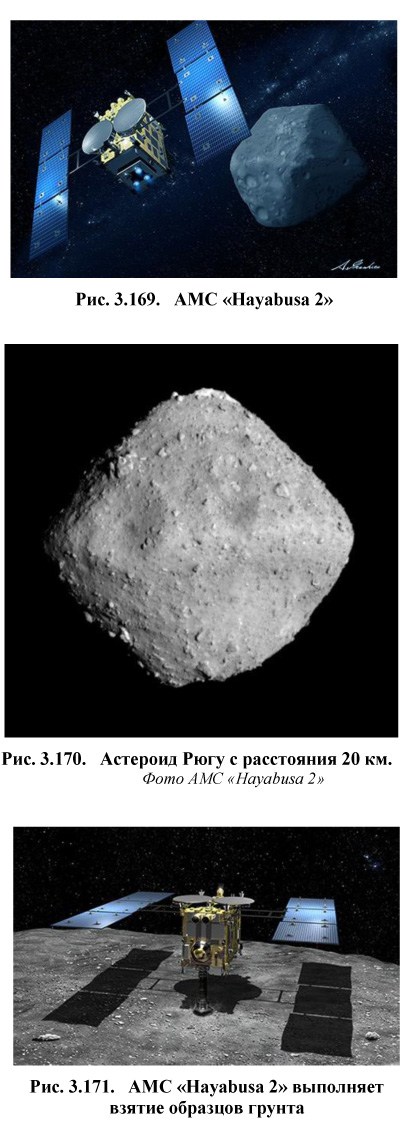
Устройство SMP представляет собой раскрываемый конус длиной 1 м и максимальной шириной 0,2 м. При касании поверхности астероида широкой частью конуса внутри него выстреливается танталовая пуля массой 5 г и диаметром 10 мм. При ударе пули в грунт со скоростью 300 м/с часть вещества астероида выбивается из поверхности и попадает по конусу в специальные ловушки. Через секунду после выстрела ЖРД включаются на отвод АМС от астероида, чтобы избежать заваливания набок. Должно было быть выполнено три спуска на астероид для забора грунта в трех разных точках.
В состав аппаратуры АМС входят также три навигационные камеры:
- широкоугольная камера ONC-W1, направленная вперед, с полем обзора 54° х54° и разрешением 7 м на удалении 7 км;
- широкоугольная камера ONC-W2, аналогичная камере ONC-W1, но направленная вперед-вбок, в частности, для съемки посадочного зонда после его отделения;
телескопическая камера ONC-T, направленная вперед, с углом обзора 5,8° х5,7 и разрешением 1 м на удалении 7 км.
Размер базового блока 1,4 х 1,6 х 1,0 м. Размах панелей солнечных батарей - 6,0 м. Стартовая масса АМС «Hayabusa 2» около 600 кг, в т.ч. 100 кг топлива (из них 73 кг - ксенон).
АМС поддерживает трехосную ориентацию при помощи четырех гиродинов. Система ориентации и маневрирования включает 12 ЖРД ISAS-20N, разделенных на два контура. Тяга каждого ЖРД - 2,0 кгс. Маршевая ДУ состоит из четырех ионных двигателей, имеющих регулируемую тягу до 0,001 кгс. Двигатели имеют возможность качания на 5° в любую сторону. Одновременно могут быть включены до трех двигателей, создающих суммарную тягу от 0,0005 кгс до 0,0028 кгс. Расчетный ресурс каждого двигателя - более 18 000 ч.
Возвращаемая капсула имеет диаметр 0,4 м и высоту 0,2 м. Масса капсулы -16,5 кг. Капсула имеет теплозащитный экран, который сбрасывается на высоте около 10 км, после чего капсула выполняет спуск на парашюте.
Старт АМС «Hayabusa 2» произведен 03.12.14 г. Для запуска использована ракета-носитель H-2А/202.
Вместе с АМС «Hayabusa 2» были выведены попутные КА: «Procyon», «Despatch» и «Shin'en 2».
03.12.15 г. АМС выполнила гравитационный маневр при пролете Земли.
27.06.18 г. АМС сблизилась с астероидом Рюгу на запланированное расстояние около 20 км. По выполненным наблюдениям был определен средний диаметр астероида, который составляет 865 м. Система управления АМС обеспечивала полет АМС на постоянном расстоянии до астероида.
06.08.18 г. АМС «Hayabusa 2» начала сближение с астероидом. После пробного снижения до высоты 851 м АМС была отведена на расстояние 3 км от астероида. АМС выполняла съемку и картирование поверхности астероида с расстояния около 1 км в течение месяца.
В сентябре 2018 года началась подготовка к забору образцов грунта и высадке на поверхность лэндера и мини-роверов. 22.09.2018 года АМС сблизилась с астероидом на расстояние нескольких десятков метров и выполнила сброс блока роверов «Minerva-II 1». В соответствии с программой блок разделился на две части: «Rover 1A» и «Rover 1B». Оба мини-ровера достигли поверхности астеро- ида и после нескольких отскоков приступили к исследованиям. 03.10.2018 года был сброшен зонд «Mascot». 27.10 2018 года с высоты 20 м в предполагаемую точку взятия грунта был сброшен маяк - сфера диаметром 10 см, покрытая светоотражающей пленкой. Маяк предназначен служить ориентиром при снижении АМС для забора образца грунта.
22.02.2019 г. был произведен первый эксперимент по взятию образцов материала астероида с помощью устройства SMP. Касание грунта произошло на расстоянии около 1 м от расчетной точки.
05.04.2019 г. АМС «Hayabusa 2» приступила1 к второму этапу исследования астероида. На высоте примерно 300 м был выполнен сброс импактора SCI. Пока импактор медленно приближался к поверхности, АМС «скрылась» за астероидом. На малой высоте был произведен подрыв заряда импактора, которым в поверхность астероида был выстрелен медный снаряд. В результате попадания снаряда образовался кратер (рис. 3.174), обнаживший коренные породы, образец которых планировалось взять при втором эксперименте по отбору грунта.
1 Первоначальной программой полета этот эксперимент предполагалось выполнить в августе 2019 года.
Наблюдение за процессом удара снаряда в поверхность астероида вела отделяемая камера DCAM3, имеющая форму цилиндра диаметром около 60 мм. Камера способна вести съемку с частотой 1 кадр/с, угол обзора- 74 х74 . Разрешающая способность камеры - 0,65 м с расстояния 1 км. Камера DCAM3, стабилизируемая вращением со скоростью 60-120 град/с, в течение нескольких часов вела наблюдение, передавая информацию на базовый блок АМС со скоростью до 4 мегабит/с.
30.05.2019 г. рядом с кратером была сброшена искусственная мишень, являющаяся маяком для точного касания поверхности.
11.07.2019 года был проведен второй эксперимент по взятию образцов материала астероида с помощью устройства SMP в зоне выброса грунта, образовавшегося при попадании импактора. Сближение с астероидом выполнялось с прицеливанием по мишени, сброшенной в конце мая. 30.07.2019 года JAXA сообщила, что захват образцов вещества астероида прошел успешно.
02.10.2019 года с высоты около 1 км был сброшен мини-ровер «Minerva-II 2», который должен был достичь поверхности астероида 08.10.2019 г. К сожалению, связь с мини-ровером после сброса установить не удалось.
13.11.2019 года АМС «Hayabusa 2» завершила работу по изучению астероида и начала удаляться от Рюгу со скоростью около 10 см/с. После тестирования ионных двигателей, 03.12.2019 г. была выдана команда на включение этих двигателей, и АМС направилась к Земле.
05.12.2020 года возвращаемая капсула с грунтом астероида отделилась от АМС и после баллистического торможения в атмосфере Земли совершила парашютный спуск на полигоне Вумера в Австралии. Капсулу доставили в Японию, где она была вскрыта. Как сообщалось, капсула доставила 5,4 г астероидного вещества.
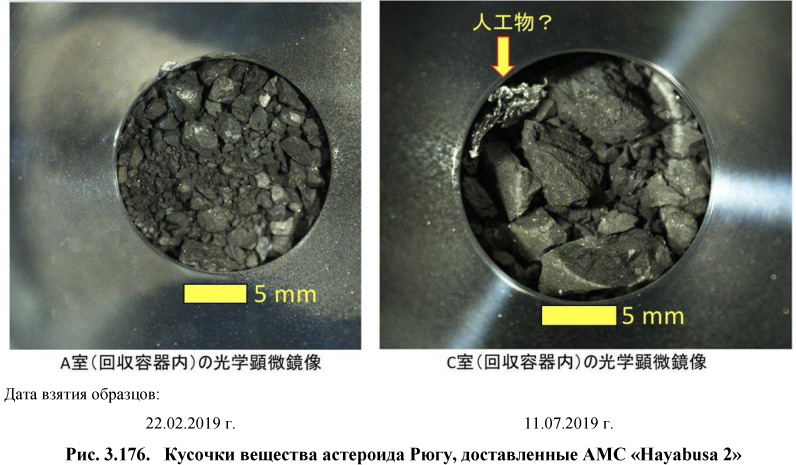
АМС «Hayabusa 2», выполнив коррекцию траектории, пролетела мимо Земли и осталась на гелиоцентрической орбите. Рассматривалось два варианта дальнейшего полета АМС.
В соответствии с первым вариантом «Hayabusa 2» должна была выполнить три гравитационных маневра - один при пролете Венеры в 2024 году и два при пролете Земли, в 2025 и 2026 годах. В таком случае в ноябре 2029 года АМС сблизилась бы с быстровращающимся околоземным1 астероидом 2001 AV43.
1 Околоземные астероиды - астероиды, чьи орбиты пересекают орбиту Земли.
По второму варианту, утвержденному в сентябре 2020 года, АМС выполнит пролет астероида 2001 СС21 в июле 2026 года и два гравитационных маневра у Земли в 2027 и 2028 годах, что обеспечит сближение в июле 2031 года с другим быстровращающимся околоземным астероидом - 1998 KY26. Оба астероида представляют большой научный интерес.
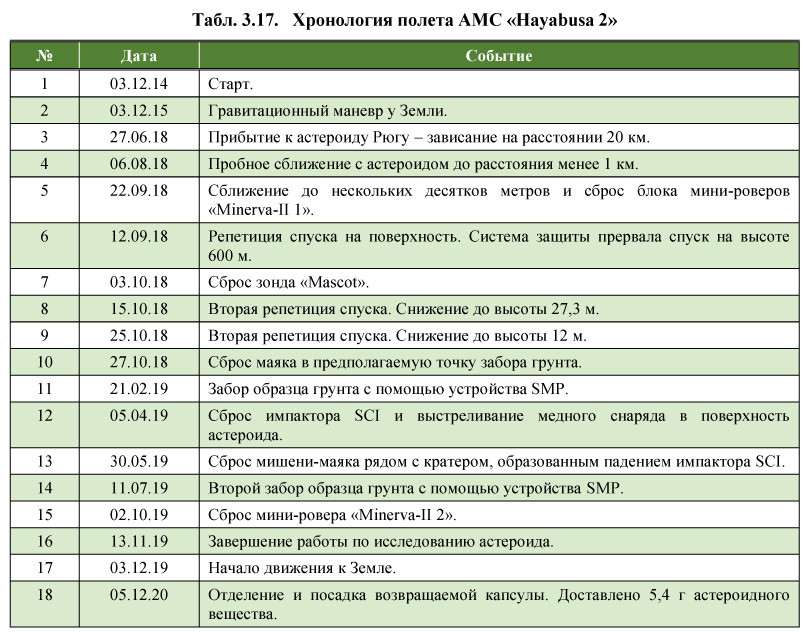
7.7.2.1. Малый посадочный аппарат «MASCOT»
Лэндер1 «MASCOT» (Mobile Asteroid Surface sCOuT - мобильный разведчик поверхности астероида) создан DLR (германское космическое агентство) в рамках европейского проекта «Marco Polo»2.
1 От lander - посадочный аппарат (англ.).
Корпус аппарата выполнен в виде параллелепипеда размером 0,3 х 0,3х 0,2 м, масса - 10 кг. Лэндер должен быть просто сброшен на поверхность астероида, прочность конструкции обеспечивает безопасное падение на астероид в условиях сверхмалой гравитации. После достижения поверхности датчики лэндера определяют положение корпуса. При необходимости в действие приводится механизм инерционного переворота корпуса. Внутри корпуса установлен источник электроэнергии, радиопередатчик для отправки информации на базовый блок АМС «Hayabusa 2» и четыре научных прибора:
- MicrOmega - инфракрасный гипер-спектральный микроскоп;
- MAG - магнитометр;
- CAM - видеокамера;
- MARA - инфракрасный радиометр.
Лэндер был сброшен 03.10.18 г. с высоты 51 м. Он успешно совершил посадку и приступил к работе, которая была завершена через 17 часов в связи с исчерпанием заряда аккумуляторов.
7.7.2.2. Мини-роверы «Minerva-II»
АМС «Hayabusa 2» несла два блока мини-роверов «Minerva-II».
Первый блок состоит из двух мини-роверов, названных «Rover1A» и «Rover1B»1. После отделения от АМС мини-роверы разделяются и падают на поверхность астероида независимо друг от друга. Масса блока 2,5 кг, масса каждого ровера по отдельности 1,1 кг. Диаметр мини-ровера 17 см, высота - 7 см.
1 Позднее мини-роверам присвоили имена собственные «Hibou» и «Owl» («Филин» и «Сова», англ.).
Второй блок представляет собой мини-ровер «Rover2», аналогичный мини-роверу «Minerva», неудачно сброшенному с АМС «Hayabusa» на астероид Итокава в 2005 году. Масса - 1,6 кг.
Мини-роверы оснащаются телекамерами и инфракрасными приборами. Инерционное устройство внутри мини-роверов позволяет им перемещаться по поверхности астероида.
Сброс блока мини-роверов «Minerva-II 1» был произведен 22.09.2018 года с высоты несколько десятков метров. В соответствии с программой блок разделился на две части: «Rover 1A» и «Rover 1B». Оба мини-ровера достигли поверхности астероида и после нескольких отскоков приступили к исследованиям. Данные от мини-ровера «Rover 1A» поступали в течение 114 дней, а от «Rover 1B» в течение 10 дней, после чего поток данных прервался. Было сделано предположение, что, перемещаясь по поверхности астероида, мини-роверы попали в тень, где перестали получать энергию от солнечных батарей. Однако, 2 августа 2019 года АМС «Hayabusa 2» неожиданно получила сигнал и телеметрическую информацию от мини-ровера «Rover 1B». Специалисты предположили, что в связи с приближением к Солнцу интенсивность света, попадающего на солнечные элементы мини-ровера, возросла до уровня, позволившего аппаратуре мини-ровера включиться и начать передавать информацию. Сигнал поступил из точки, значительно удаленной от места сброса, из чего специалисты сделали вывод, что мини-ровер продолжал «прыжковое» движение в течение десяти месяцев без связи с «материнской» АМС.
Что касается мини-ровера «Minerva-II 2», то еще до отделения было обнаружено, что его аппаратура вышла из строя. Тем не менее, 02.10.2019 г. на высоте примерно 1 км от поверхности астероида мини-ровер был отделен от АМС «Hayabusa 2» с целью проведения измерений гравитационного поля. Мини-ровер должен был достичь поверхности астероида 08.10.2019 г.
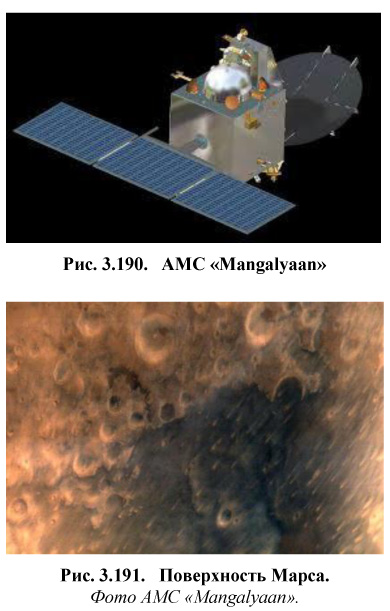 8.5. Марсианская АМС «Mangalyaan»
8.5. Марсианская АМС «Mangalyaan»Проект АМС для полета к Марсу разрабатывался ISRO с 2008 года под общим название «Mars Orbiter Mission». АМС, названная «Mangalyaan» («Мангалаяан», в переводе - «Марсианский аппарат»), была разработана на основе конструкции лунной АМС «Chandrayaan-1».
Сначала планировалось, что АМС будет иметь массу около 1 800 кг и запускаться ракетой-носителем GSLV. В этом случае АМС могла бы нести научные приборы суммарной массой около 25 кг. В состав возможной аппаратуры входили:
- PRISM (Probe for Infrared Spectroscopy for Mars) - инфракрасный спектрометр;
- MENCA (Mars Exospheric Neutral Composition Analyzer) - анализатор нейтрального состава атмосферы;
- TIS (Thermal emission measuring Instrument from Surface) - термоэмиссионная камера;
- MCC (Mars Colour Camera) - цветная телекамера;
- MSM (Methane Sensor for Mars) - датчик обнаружения метана;
- MARIS (Mars RadIation Spectrometer) - радиационный спектрометр;
- PACE (Plasma And Current Experiment) - аппаратура для изучения плазмы и токов в атмосфере Марса;
- прибор микроволнового дистанционного зондирования атмосферы;
- инструменты для обнаружения плазменных волн в атмосфере.
Рассматривались следующие возможные даты запуска: ноябрь 2013 г., 2016 г., 2018 г. В 2012 году на работы по марсианскому проекту были выделены дополнительные фонды, что позволило готовить АМС к запуску в октябре-ноябре 2013 года.
В июле 2012 года стало известно, что принято решение о переориентации запуска АМС к Марсу на менее мощную РН PSLV, что снизило общую массу АМС, а масса приборов была уменьшена до 14,5 кг.
В состав установленной научной аппаратуры вошли:
- MCC (Mars Colour Camera) - цветная телекамера;
- TIS (Thermal Imaging System) - инфракрасный построитель изображений;
- LAP (Lyman Alpha Photometr) альфа-фотометр;
- MENCA (Mars Exospheric Neutral Composition Analyzer) - анализатор нейтрального состава атмосферы;
- MSM (Methane Sensor for Mars) - датчик обнаружения метана.
Телекамера позволяла в перицентре орбиты получать изображения участков поверхности Марса размером 50 х 50 км с разрешением 25 м на пиксель.
АМС была оборудована маршевой ДУ тягой 45,4 кгс и восемью ЖРД ориентации и стабилизации тягой по 2,27 кгс. ДУ работала на НДМГ и смеси окислов азота. Солнечная батарея состояла из трех панелей размерами 1,8 х 1,4 м каждая. Генерируемая солнечными батареями мощность на орбите Марса составляла 840 Вт. Стартовая масса АМС - 1 337 кг, в т.ч. масса топлива - 852 кг.
Для запуска АМС была использована ракета-носитель PSLV-XL. Старт состоялся 05.11.13 г. с космодрома на острове Шрихарикота. АМС была выведена на промежуточную орбиту высотой 248 х 23 550 км и наклонением 19,27 град. Шестью последовательными включениями собственной ДУ АМС должна была последовательно повышать апогей орбиты, а 01.12.13 г. седьмым включением ДУ перейти на траекторию полета к Марсу.
10.11.13 г. при четвертом включении ДУ, которое должно было повысить апогей орбиты АМС до 100 000 км, произошло преждевременное выключение ДУ. АМС оказалась на орбите с апогеем 78 276 км. 11.11.13 г. был проведен дополнительный, пятый внеплановый маневр поднятия апогея, а 15.11.13 г. - шестой. АМС вышла на орбиту с высотой апогея 192 874 км и периодом обращения 91 час. 30.11.13 г. в перигее орбиты ДУ была снова включена для выполнения окончательного разгона АМС к Марсу. Перелет выполнялся по траектории, близкой к гомановскому эллипсу.
АМС вышла на орбиту спутника Марса 24.09.14 г. Начальные параметры орбиты: 422 х 76 994 км, наклонение 150 град., период обращения 72,87 часа.
Дополнительно в программу работы АМС было включено проведение измерений при пролете кометы Сайдинга-Спринга C/2013 А1, которая 19.10.14 г. прошла на расстоянии 144 000 км от Марса.
Расчетное время работы АМС «Mangalyaan» на орбите спутника Марса - 180 суток. 25.03.15 г. ISRO объявила о продлении работы АМС до конца сентября 2015 года, то есть до истечения года с момента выхода на околомарсианскую орбиту.
9.1. Проект «PRIME»
В мае 2007 года Канадское космическое агентство выдало заказ фирме Optech Inc. на проработку проекта АМС для полета к Фобосу. Проект, получивший название PRIME (Phobos Reconnaissance and International Mars Exploration), был выбран агентством из 12 предложений по разработке межпланетной станции. Проект предусматривает полет к Фобосу, сближение и посадку на поверхность. Предполагается с помощью бортового лидара предварительно составить карту поверхности Фобоса и выбрать место для посадки. Наиболее вероятным местом назывались окрестности одиноко стоящей скалы, названной «Монолит Фобоса» (Phobos Monolith).
Практического осуществления проекта не последовало.
 4.5.2. Проект «Венера-Д»
4.5.2. Проект «Венера-Д»В 2005 году Академия наук вновь подняла вопрос о создании долгоживущей венерианской станции (условное наименование «Венера-Д») со сроком запуска в 2015 году. Работы по проекту АМС «Венера-Д» были включены в Федеральную космическую программу на 2010 - 2015 годы.
Проектная масса посадочного аппарата в пределах 1,5 т, масса десантного модуля 1 т. Перелетно-орбитальный блок должен быть создан на базе РБ «Фрегат». Запуск рассчитан на РН «Протон».
Предполагалось, что СА сможет проработать на поверхности Венеры 30 суток, а орбитальный блок - не менее 3 лет на орбите ИСВ.
По состоянию на 2012 год ожидавшийся срок запуска - 2022 г.
4.5.3. Облегчённая АМС «ВЕНЕРА-Д».
Для сокращения сроков разработки был предложен более легкий вариант АМС «Венера-Д», рассчитанный на запуск РН «Союз-2». Проектная масса АМС составила 8 120 кг, при этом масса посадочного аппарата была уменьшена до 170 кг. Возможный срок запуска - 2016 год.
4.5.4. Российско-европейский вариант «Венера-Д»
В 2007 году появилось предложение о совмещении проекта «Венера-Д» с программой ESA «European Venus Explorer» (EVE).
Проект совместной АМС выглядел следующим образом. Орбитальный модуль создается ESA на основе АМС «Venus Express». Посадочный аппарат создается российской стороной. Предполагалось доставить на Венеру также небольшие аэростатные зонды для исследований атмосферы Венеры - европейский и японский низколетящий, который должен плавать в атмосфере на высоте около 35 км.
Посадочный аппарат должен иметь массу 170 кг, в т.ч. 25 кг научной аппаратуры. Время спуска в атмосфере - 65 мин, время работы на поверхности Венеры - 15-30 минут.
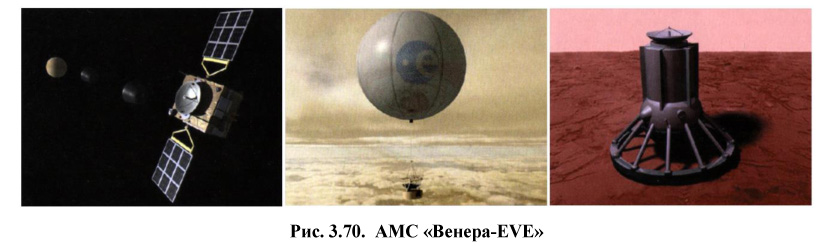
В случае принятия решения о совместной российско-европейской венерианской АМС, задача создания «долгоживущей» посадочной станции была бы отложена на неопределенное будущее. Однако, достичь взаимоприемлемого решения с ESA не удалось.
5.3.4. Проект АМС «Фобос-Грунт» 2004 года
К 2004 году проект АМС «Фобос-Грунт» был переработан и изменен.
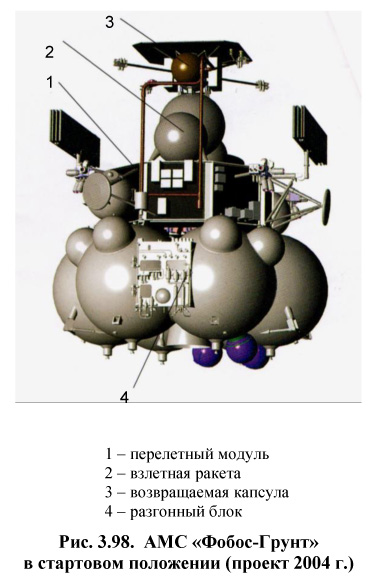 Основное отличие АМС 2004 года от проекта 2000 года - использование химических ЖРД вместо электрореактивных двигателей.
Основное отличие АМС 2004 года от проекта 2000 года - использование химических ЖРД вместо электрореактивных двигателей.Конструктивно АМС состоит из разгонного блока, перелетного модуля, взлетной ракеты и возвращаемого аппарата (ВА) с возвращаемой капсулой. Разгонный блок, представляющий собой РБ «Фрегат» без системы управления, служит для довыведения АМС на промежуточную орбиту и для разгона на межпланетную траектории. После окончания работы разгонный блок отделяется. Окончательный доразгон на траекторию перелета выполняется с помощью ДУ перелетного модуля. Управление разгонным блоком ведется бортовым комплексом управления перелетного модуля. После выхода на околомарсианскую орбиту АМС выполняет ряд маневрирований и выходит на квазисинхронную орбиту, имеющую равный с орбитой Фобоса период обращения, но отличающуюся в апоцентре на +50 км, а в перицентре на - 50 км. Таким образом, АМС будет находиться в окрестностях Фобоса на удалении 50-130 км от него, совершая облет Фобоса за один оборот вокруг Марса (7 ч 40 мин). После выполнения подготовительных операций выполняется посадка на трехопорное шасси. Возможно, будет использоваться гарпунный якорь. Непосредственно после посадки приводится в действие бурильное устройство. Возможно, на АМС будет установлен манипулятор для отбора образцов непосредственно с поверхности. Отобранный грунт массой 200…400 г загружается в возвращаемую капсулу. Старт взлетной ракеты состоится через несколько дней после посадки. Перелетный модуль остается на поверхности Фобоса и продолжает вести наблюдения в течение 1 года.
Взлетная ракета состоит из двигательной установки с топливными баками, и возвращаемого аппарата, в который, в свою очередь, входят возвращаемая капсула, комплекс управления, двигатели малой тяги на диаметрально расположенных штангах, и солнечная батарея. После старта взлетная ракета выходит на базовую околомарсианскую орбиту, на которой находится несколько месяцев до наступления стартового окна для перелета к Земле. После разгона к Земле возвращаемый аппарат отделяется от взлетной ракеты и стабилизируется вращением. Ось вращения располагается таким образом, чтобы солнечная батарея во все время перелета была ориентирована на Солнце. Возвращаемая капсула входит в атмосферу Земли и выполняет беспарашютную посадку на территории России.
Стартовая масса АМС - 8 120 кг, в том числе: перелетный модуль - 590 кг, взлетная ракета - 270 кг. Масса возвращаемого аппарата 110 кг, в т.ч. спускаемый аппарат 8-9 кг.
Масса научной аппаратуры на перелетном модуле - 50 кг. Возможно, на борту АМС могла бы быть установлена дополнительная научная нагрузка массой 120 кг. В качестве варианта такой нагрузки рассматривалась доставка на Марс четырех малых метеостанций массой по 15-20 кг. Каждая такая станция могла бы нести до 4 кг научной аппаратуры.
Запуск АМС «Фобос-Грунт» был рассчитан на РН «Союз-2». Старт намечался на октябрь 2009 года.
План полета АМС «Фобос-Грунт» приведен в табл. 3.19.
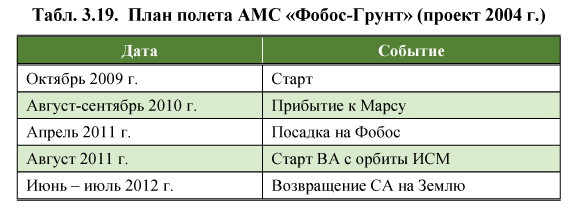
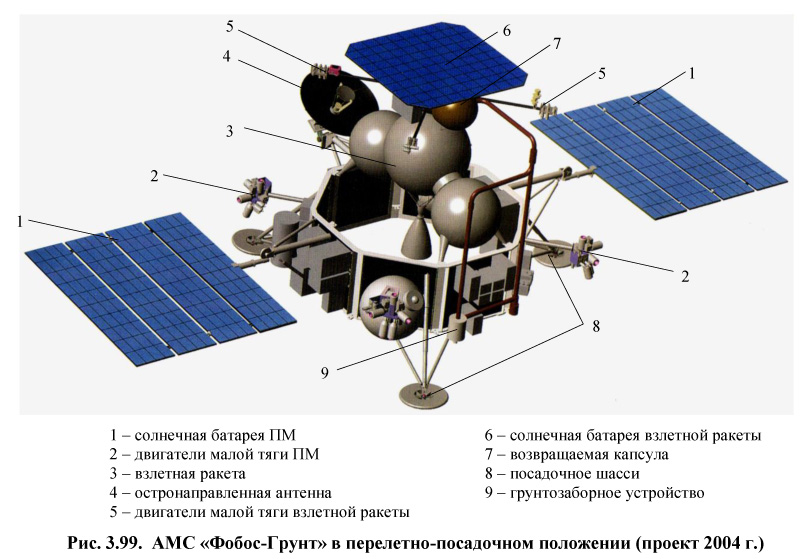
5.3.5. Уточнённый проект 2005 года.
 В процессе дальнейшей разработки проекта конструкция АМС уточнялась и корректировалась. Ниже описан проект АМС «Фобос-Грунт» по состоянию на конец 2005 года.
В процессе дальнейшей разработки проекта конструкция АМС уточнялась и корректировалась. Ниже описан проект АМС «Фобос-Грунт» по состоянию на конец 2005 года.АМС конструктивно состоит из маршевой двигательной установки (МДУ), перелетного модуля (ПМ) и возвращаемого аппарата (ВА). Возвращаемый аппарат должен доставить к Земле спускаемый аппарат (СА) с взятыми на Фобосе пробами грунта.
МДУ создается на базе разгонного блока «Фрегат». Конструктивно МДУ представляет собой связку из шести сферических контейнеров, часть из которых является топливными баками, а в других расположена бортовая аппаратура. В центре МДУ размещен ЖРД. Масса модуля МДУ в заправленном состоянии около 6 100 кг. Основной задачей МДУ является разгон АМС с промежуточной орбиты ИСЗ на траекторию полета к Марсу. После окончания разгона МДУ отбрасывается.
Перелетный модуль обеспечивает управление АМС на всех этапах от разгона с орбиты ИСЗ до выхода на околомарсианскую орбиту, сближение с Фобосом и посадку на Фобос. Конструкция ПМ включает основную коробчатую раму, раскрываемое шасси, тормозную двигательную установку с топливными баками, грунтозаборное устройство, солнечные батареи и блоки служебных систем. Сверху на ПМ крепится возвращаемый аппарат. Масса перелетного модуля 1 550 кг.
ВА состоит из приборной рамы с закрепленной на ней двигательной установкой, двигателями ориентации и стабилизации и бортовых систем. Электроснабжение аппаратуры обеспечивается панелью солнечных батарей, размещенных непосредственно на верхней плоскости приборной рамы. В центре верхней плоскости размещен спускаемый аппарат. Масса ВА составляет 215 кг, в т.ч. масса СА - 8 кг.
Полная масса АМС составляет 8 120 кг.
Вопрос о доставке на Марс малых метеорологических станций по состоянию на 2005 год оставался открытым.
АМС должна выйти на орбиту высотой 700 х 77 000 км и наклонением 5 град. После нескольких месяцев маневрирования должна состояться посадка на Фобос на стороне, постоянно обращенной к Марсу, в точке с приблизительными координатами 20° ю.ш., 315° з.д. Всего должно быть собрано около 100 см3 грунта - колонка реголита и фрагменты размером до 15 мм. Собранный грунт должен быть помещен в капсулу спускаемого аппарат, после чего ВА стартует с перелетного модуля и в августе 2011 года направляется к Земле. В период с 15 июня по 20 июля 2012 года спускаемый аппарат должен войти в атмосферу Земли и совершить посадку. Перелетный модуль остается на поверхности Фобоса и продолжает исследования в районе посадки.
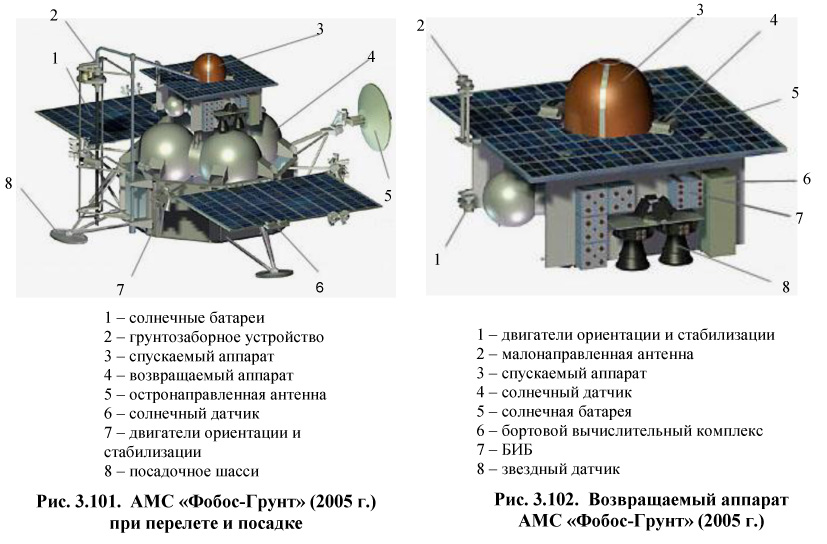
5.3.6. АМС «Фобос-Грунт»
В 2007 году конструкция и состав АМС «Фобос-Грунт» были в очередной раз пересмотрены. В состав АМС был введен в качестве дополнительного груза китайский микроспутник - АМС «Инхо-1». В связи с этим между маршевой ДУ и перелетным модулем была установлена переходная ферма, внутри которой размещалась китайская АМС. В апреле 2009 года было принято окончательное решение не включать в состав АМС дополнительные нагрузки в виде малых метеорологических станций (ММС), разработка которых в связи с этим была прекращена.
Из-за изменения массово-инерционных характеристик переработке подверглась вся конструкция АМС, включая маршевую ДУ. Окончательно АМС создавалась на базе унифицированного многоцелевого модуля «Флагман», который должен был стать основой АМС различного назначения.
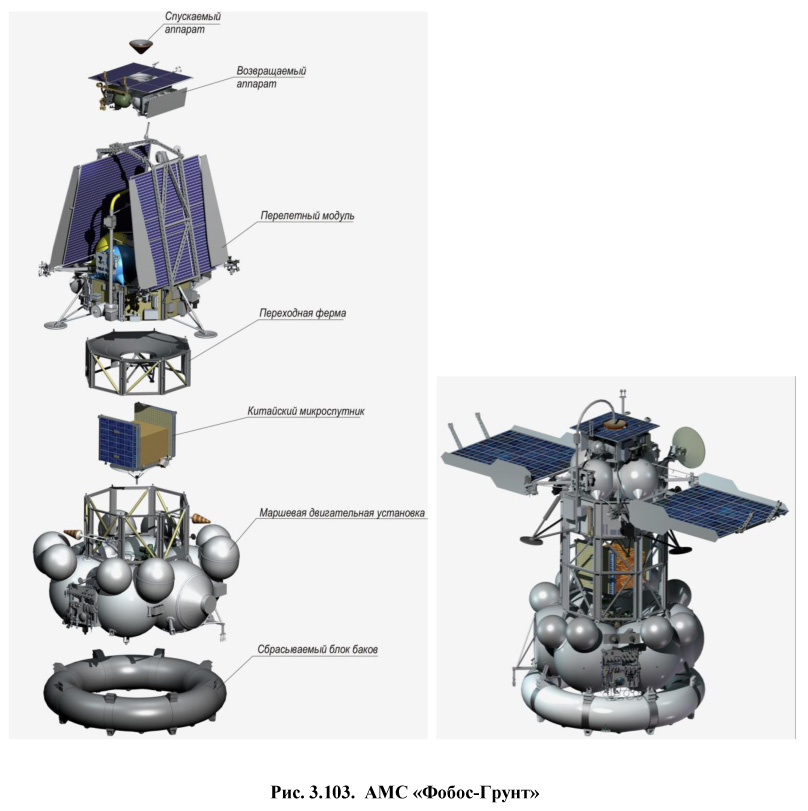
Конструктивно АМС «Фобос-Грунт» состоит из ряда модулей:
- СББ - сбрасываемый блок баков;
- МДУ - маршевая двигательная установка;
- ПФ - переходная ферма с установленной внутри китайской АМС «Инхо-1»;
- ПМ - перелетный модуль;
- ВА - возвращаемый аппарат;
- СА - спускаемый аппарат.
МДУ в комплекте с СББ является модифицированным вариантом разгонного блока «Фрегат-СБ». Отличие заключается в отсутствии систем управления, энергопитания и двигателей системы ориентации и стабилизации, которые перенесены на перелетный блок. В МДУ используется ЖРД С5.92, имеющий два уровня тяги - 2,0 т и 1,4 т. Топливо - НДМГ, окислитель - азотный тетраоксид.
Перелетный модуль, в свою очередь, состоит их приборного отсека и двигательной установки. Негерметичный приборный отсек имеет форму восьмигранной призмы. Каркас приборного отсека используется для крепления внешних устройств - солнечных батарей, грунтозаборного устройства и посадочного трехопорного устройства. Площадь солнечных батарей составляет 8,9 м2, генерируемая мощность - до 1 000 Вт.
ДУ ПМ включает четыре сферических бака с топливными компонентами (НДМГ и азотный тетраоксид), блок двигателей коррекции и четыре блока двигателей малой тяги, смонтированные на трубчатых пилонах. Блок двигателей коррекции состоит из четырех ЖРД 11Д458Ф тягой по 39 кг. Каждый блок двигателей малой тяги включает четыре ЖРД 11Д457Ф тягой по 5,5 кгс и один ЖРД 17Д58ЭФ тягой 1,27 кгс. Двигатели малой тяги используются для управления ориентацией АМС, для создания начальной перегрузки при запуске МДУ, а также для прижима АМС к поверхности Фобоса при посадке и работе грунтозаборного устройства.
Возвращаемый аппарат представляет собой по сути самостоятельную АМС, в состав которой входят ДУ, система управления, комплекс радиосвязи, система электроснабжения и другие необходимые системы. ДУ имеет тягу около 10 кгс. Кроме основного ЖРД, в состав ДУ входят четыре блока двигателей ориентации и стабилизации (ОиС). Площадь солнечной батареи - 1,64 м2. Масса ВА при старте с Фобоса составляет 287,5 кг, в том числе масса топлива - 135 кг.
Спускаемый аппарат, установленный в верхней части ВА, имеет конический теплозащитный экран диаметром 0,45 м. Масса спускаемого аппарата - 7,3 кг, в том числе масса капсулы с грунтом - 0,5 кг. Капсула рассчитана на доставку 100 см3 грунта массой около 200 г.
Научная аппаратура, установленная на АМС «Фобос-Грунт», включает следующие приборы и устройства:
1. Для исследования грунта Фобоса и атмосферы Марса:
- термический дифференциальный анализатор ТДА;
- газовый хроматограф ХМС-1Ф;
- масс-спектрометр МАЛ-1Ф;
- мёссбауэровский спектрометр MIMOS II;
- гамма-спектрометр ФОГС;
- нейтронный и гамма-спектрометр HEND;
- лазерный времяпролетный масс-спектрометр «Лазма»;
- масс-спектрометр вторичных ионов «Манага-Ф»;
- термодетектор «Термофоб»;
- Фурье-спектрометр АОСТ;
- Эшелле-спектрометр ТИММ;
- микроскоп-спектрометр MicrOmega;
- грунтозаборный комплекс, включающий грунтоперегрузочное устройство;
- манипуляторные комплексы МК и МК2;
- грунтозаборное устройство пенетрационного типа CHOMIK.
2. Для изучения внутренней структуры Фобоса:
- длинноволновый планетный радар ДПР;
- сейсмогравиметр ГРАС-Ф;
- сейсмометр «Сейсмо».
3. Для исследования околомарсианского пространства:
- плазменный комплекс ФПМС;
- российско-китайский эксперимент MROE;
- детектор космической пыли «Метеор-Ф»;
- дозиметр «Люлин-Ф».
4. Эксперименты по небесной механике:
- ультрастабильный осциллятор УСО1 для эксперимента «Небесная механика»;
- детекторы положения звезд и Солнца «Либрация».
5. Телевизионные приборы:
- телевизионная система навигации и наблюдения ТСНН;
- система технического зрения манипуляторных комплексов.
6. Биологические эксперименты:
- «БиоФобос/Анабиоз»;
- «БиоФобос/Лайф».
Телевизионная система ТСНН включает два комплекта телекамер, разнесенных примерно на 2 м, что обеспечивает получение стереоизображений. Каждый комплект состоит из узкоугольной камеры УТК с фокусным расстоянием 500 мм и широкоугольной камеры ШТК с фокусным расстоянием 18 мм. Камеры УТК обеспечивают разрешение 0,5 м с расстояния 30 км и до 1 см в процессе посадки. Камеры ШТК ведут съемку с максимально возможным углом зрения и обеспечивают разрешение не хуже 20 см с высоты 500 м.
Биологические эксперименты заключаются в исследовании длительного воздействия условий космического перелета на микроорганизмы и микроскопические беспозвоночные, помещенные в капсулы. Капсулы с биологическими образцами находятся в СА и должны быть извлечены после возвращения СА на Землю.
Стартовая масса АМС «Фобос-Грунт» - 13,5 т, в том числе масса СББ - около 3,4 т. Запас топлива в сбрасываемых баках - 3,0 т, в баках МДУ - 7,0 т.
Масса АМС «Фобос-Грунт» после отделения «Инхо-1» и переходной фермы, т.е. перелетного модуля с возвращаемым аппаратом - 2,1 т.
Схема полета АМС «Фобос-Грунт» выглядит следующим образом. Ракета-носитель выводит АМС на опорную орбиту высотой 200х350 км. Затем происходит двухэтапный перевод АМС на траекторию полета к Марсу. Первое включение МДУ, при котором расходуется топливо из СББ, переводит АМС на промежуточную эллиптическую орбиту ИСЗ, после чего пустой СББ сбрасывается. Второе включение МДУ выводит АМС на перелетную траекторию. Во время перелета с орбиты ИСЗ до Марса МДУ трижды включается для выполнения коррекций траектории. При подлете к Марсу МДУ переводит АМС на околомарсианскую орбиту высотой 800 х 79 000 км. На этой орбите МДУ отбрасывается вместе с нижним ярусом ПФ.
Следующей операцией после выхода на орбиту ИСМ является отделение китайской АМС «Инхо-1» и сброс верхнего яруса ПФ.
После 10-15 суток, необходимых для уточнения орбитальных параметров, выполняется перевод АМС на орбиту наблюдения высотой около 9 910 км (на 535 км выше орбиты Фобоса), плоскость которой совпадает с плоскостью орбиты Фобоса. Через некоторое время АМС переводится на так называемую квазиспутниковую орбиту. Двигаясь по этой орбите, АМС будет в одной части витка на 50 км выше Фобоса, а на противоположной - на 50 км ниже Фобоса. Фактически это означает, что АМС будет постоянно находиться вблизи Фобоса, на расстоянии 50-130 км. Примерно через пять суток пребывания АМС на квазиспутниковой орбите должна быть выполнена посадка на Фобос.
Расчетная вертикальная скорость в момент касания - 1,0-2,5 м/с, горизонтальная - не более 1,0 м/с. На высоте 1-2 м включаются верхние ЖРД блоков двигателей малой тяги, обеспечивающие прижатие АМС к поверхности Фобоса с усилием величиной около 22 кг. Через несколько секунд после касания ЖРД выключаются.
Для посадки были определены две точки на поверхности Фобоса:
- 5° ю.ш., 235° з.д.
- 5° с.ш., 230° з.д.
Штатная программа полета предусматривала длительное пребывание АМС на поверхности Фобоса. В этом случае забор грунта может производиться по командам с Земли на основе анализа переданных изображений поверхности в районе посадки АМС. Время старта определяется по наиболее благоприятным баллистическим условиям для перелета к Земле.
В случае потери связи с Землей без восстановления ее за заданное время, АМС переходит в автоматический режим работы. В этом случае забор грунта выполняется без команд с Земли, после чего происходит старт возвращаемого аппарата.
Старт и полет к Земле осуществляются в следующей последовательности. ВА отделяется от АМС при помощи пружинных толкателей, после чего стабилизируется с помощью двигателей ОиС и включает на 16с основной ЖРД для отхода от Фобоса. После выполнения ряда маневров АМС оказывается на орбите с гарантированным сроком безопасного существования 10 суток. В течение трех суток устанавливается связь с Землей, выполняется расчет баллистических параметров, и АМС переводится на круговую базовую орбиту высотой на 300-350 км ниже орбиты Фобоса, где находится в режиме ожидания до наступления стартового окна. Переход на траекторию перелета к Земле выполняется по трехимпульсной схеме, во время перелета предусмотрены пять коррекций траектории.
Отделение СА происходит за два часа до расчетного времени входа в атмосферу. Вход в атмосферу на высоте 120 км должен происходить под углом 33 -45° к местному горизонту. Максимальные перегрузки при баллистическом торможении СА - 160-280g. Посадка происходит без использования парашютов, с вертикальной скоростью 27,6-33,3 м/с. Ударные перегрузки в момент касания грунта до 3 600g для контейнера с грунтом и до 8 100g для лобового экрана. По плану посадка СА должна была произойти на территории полигона Сары-Шаган в пределах окружности радиусом 30 км, координаты центра посадочной окружности - 46° 01' с.ш., 72° 10' в.д. Радиомаяк на СА отсутствует, поэтому обнаружение СА должно было производиться путем использования радиолокаторов и поисковых средств.
В результате изменений конструкции масса АМС возросла, поэтому для запуска вместо ранее планировавшейся РН «Союз-2» было решено использовать РН «Зенит-2SБ».
Летом 2009 года в связи с неготовностью АМС запуск был перенесен на 2011 год.
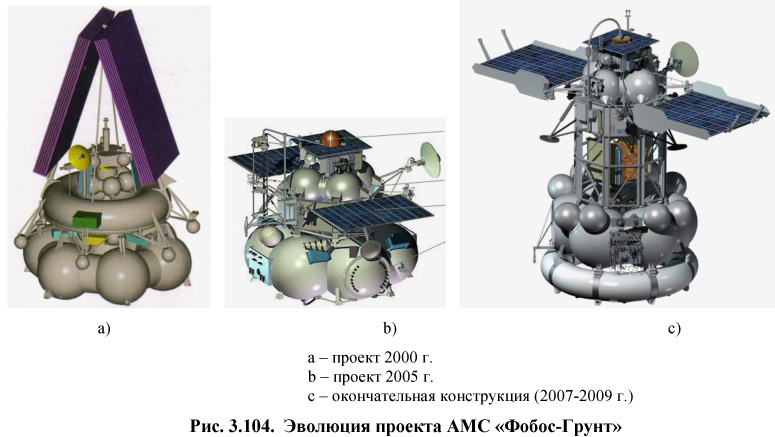
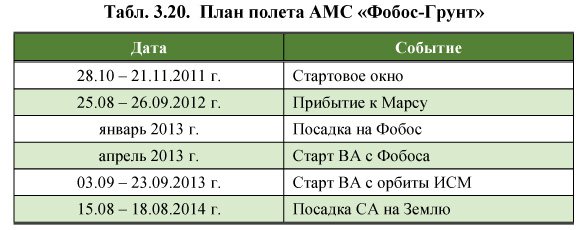
АМС «Фобос-Грунт» была выведена 08.11.11 г. на околоземную опорную орбиту высотой 206 х 345 км. Для запуска была использована РН «Зенит-2SБ». На втором витке АМС включением маршевой ДУ должна была перейти на промежуточную орбиту с апогеем 4 162 км. После выключения МДУ должен был быть отделен СББ. В конце третьего витка вторым включением МДУ АМС должна была перейти на траекторию полета к Марсу. К сожалению, первого включения ДУ не произошло, АМС осталась на опорной орбите, при этом связь с АМС была утрачена.
15.01.12 г. произошел неуправляемый сход АМС «Фобос-Грунт» с орбиты и разрушение в плотных слоях атмосферы над Тихим океаном в районе южной части Южной Америки.
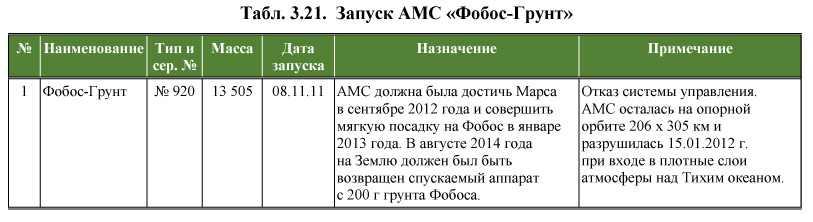
5.3.6.1. Мини-АМС «Инхо-1»
В состав АМС «Фобос-Грунт» была включена китайская мини-АМС «Инхо-1». Размеры АМС 0,75 х 0,75 х 0,6 м, масса 115 кг. АМС «Инхо-1» размещалась внутри переходной фермы между перелетным модулем и маршевой ДУ. После торможения АМС для выхода на околомарсианскую орбиту должно было произойти отделение отработавшей маршевой ДУ от перелетного модуля, после чего «Инхо-1» должна была быть отцеплена и отправлена в автономный полет.
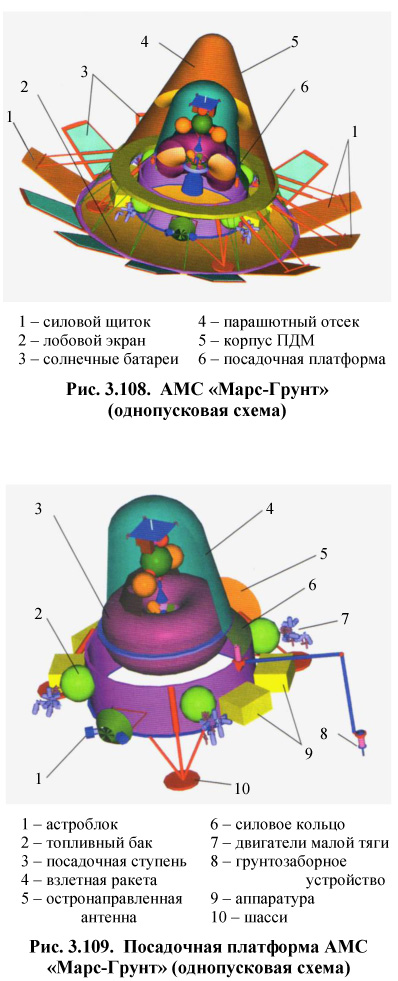 5.5. Проекты, оставшиеся перспективными
5.5. Проекты, оставшиеся перспективными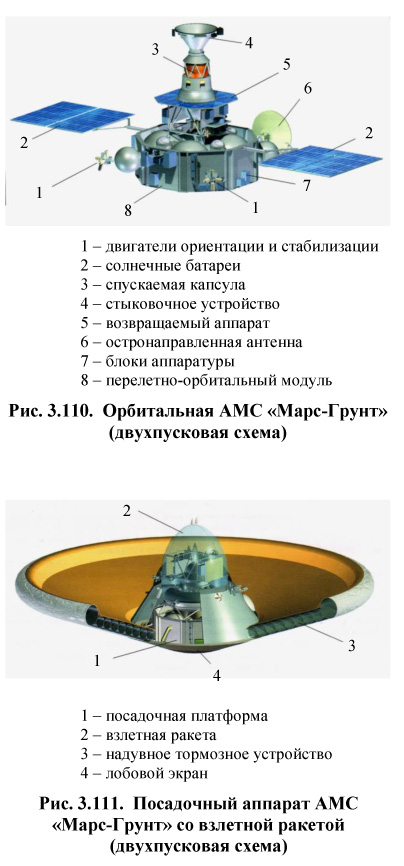 5.5.1. Проект «Марс-Грунт»
5.5.1. Проект «Марс-Грунт»В начале 2000-х годов в НПО им. С.А. Лавочкина проводилась НИР «Марс-Грунт». Другое наименование - «Экспедиция-М». Рассматривалось две схемы полета: однопусковая и двухпусковая. При наличии финансирования запуск мог бы быть произведен уже в 2013 или 2016 г.
5.5.1.1. «Марс-Грунт»: однопусковая схема
Однопусковой проект базируется на использовании АМС, сходной с АМС «Фобос-Грунт», но отличающейся по схеме посадки и взлета. АМС состоит из перелетно-десантного модуля (ПДМ) и посадочной платформы.
ПДМ, получивший наименование «Беркут», должен в дальнейшем стать универсальным средством для доставки полезного груза на поверхность не только Марса, но и других планет, имеющих атмосферу.
ПДМ представляет собой силовую оболочку в виде конуса с лобовым экраном и торовым приборным отсеком. Посадочная платформа размещается внутри ПДМ. ПДМ обеспечивает аэродинамическое торможение АМС при входе в атмосферу Марса, для большей эффективности используя раскрываемые силовые щитки. Щитки, раскрываемые по контуру вокруг лобового экрана, используются для двух целей: часть является органами управления при аэродинамическом торможении (силовые щитки), а на внутренней поверхности других щитков размещены солнечные батареи.
На втором этапе спуска в действие вводится парашютная система, одновременно сбрасывается лобовой экран. Незадолго до касания поверхности парашют уводит конус ПДМ от посадочной платформы, а платформа совершает мягкую посадку на трехопорное шасси, используя посадочные двигатели.
Посадочная платформа состоит из посадочной ступени и взлетной ракеты. Посадочная ступень представляет собой кольцеобразную силовую оболочку, к которой крепятся опоры шасси, топливные баки с посадочными двигателями, блоки аппаратуры и грунтозаборное устройство. В центре посадочной ступени установлена взлетная ракета.
Взлетная ракета имеет три ступени. Первая ступень обеспечивает старт ракеты с Марса. Вторая ступень служит для довывода на орбиту спутника Марса и затем для перехода на траекторию перелета к Земле. Третья ступень является собственно возвращаемым аппаратом, аналогичным возвращаемому аппарату АМС «Фобос-Грунт». В состав третьей ступени входит спускаемый аппарат, который должен доставить на Землю 100…200 г марсианского грунта.
Старт взлетной ракеты с Марса должен произойти через несколько дней после посадки. Взлетная ракета должна выйти на базовую орбиту спутника Марса, где будет находиться несколько месяцев, дожидаясь стартового окна для перелета к Земле.
Расчетная масса перелетно-десантного модуля равна 2 740 кг, в том числе масса топлива - 500 кг. Масса посадочной платформы - 752 кг, взлетной ракеты - 1 700 кг. Полная стартовая масса АМС - 5 200 кг.
Запуск и выведение АМС «Марс-Грунт» на траекторию полета к Марсу могут быть выполнены ракетой носителем 8К82К «Протон» с разгонным блоком ДМ или РН «Зенит-3SL» с разгонным блоком ДМ-SL.
5.5.1.2. «Марс-Грунт»: двухпусковая схема
Двухпусковой вариант экспедиции предполагает раздельные запуски орбитальной и посадочной АМС.
В состав орбитальной АМС входит перелетно-орбитальный модуль и возвращаемый аппарат со спускаемой капсулой.
Орбитальная АМС совершает перелет до Марса, выход на стыковочную орбиту, сближение и стыковку со взлетной ракетой посадочной АМС. После стыковки производится перегрузка контейнера с грунтом из взлетной ракеты в спускаемую капсулу возвращаемого аппарата. Взлетная ракета отделяется, а орбитальная АМС ждет несколько месяцев на орбите до наступления астрономического окна для старта к Земле. При наступлении срока старта орбитальная АМС ориентируется необходимым образом и выполняет закрутку, создавая тем самым условия для старта возвращаемого аппарата.
Посадочная АМС состоит из перелетного модуля, посадочного аппарата и взлетной ракеты.
Перелетный модуль обеспечивает коррекции траектории и электропитание систем АМС на этапе полета Земля - Марс. При подлете к Марсу посадочный аппарат отделяется и входит в атмосферу Марса, осуществляя торможение с помощью лобового экрана и надувного тормозного устройства. Непосредственно перед касанием грунта выдвигаются опоры шасси и включаются двигатели мягкой посадки.
Сразу после посадки приводится в действие грунтозаборное устройство, загружая грунт в контейнер взлетной ракеты. Взлетная ракета стартует и выходит на стыковочную около-марсианскую орбиту высотой 500 км, дожидаясь стыковки с орбитальной АМС.
Запуск посадочной и орбитальной АМС может быть произведен РН «Союз-2» с РБ «Фрегат».
5.5.2. Проект «МАРС-НЭТ»
5.5.2.1. Проект «InterMarsNet»
В 1997 году Планетная секция Совета РАН по космосу в своих предложениях, поданных на рассмотрение Совету, выдвинула в числе прочих проект «InterMarsNet» - создание совместно с NASA сети автоматических станций на Марсе для глобального изучения планеты. Проект являлся развитием российско-американской программы «На Марс - вместе» («Mars Together») и также не был реализован. Продолжением стали проекты «MetNet» и «Марс-НЭТ».
5.5.2.2. Проект «MetNet»
Проект малой метеорологической марсианской станции «MetNet» в начале 2000-х годов разрабатывался НПО им. С.А. Лавочкина совместно с Финляндским Метеорологическим Институтом. В соответствии с проектом на Марс должны быть доставлены несколько АМС «MetNet», задачами которых является мониторинг состояния атмосферы Марса в точке посадки в течение длительного времени.
Основными научными задачами малых метеостанций (ММС) «MetNet» являются:
- исследование вертикальной структуры атмосферы Марса во время спуска ММС;
- метеорологические наблюдения на поверхности Марса в течение одного марсианского года.
Комплекс полезной нагрузки малой метеостанции предназначен для решения следующих задач:
- съемка изображения поверхности Марса, измерение профиля давления и температуры во время посадки станции на Марс;
- съемка панорамного стереоскопического изображения окружающей местности в точке посадки;
- получение абсолютных значений температуры, давления, влажности и их изменение по высоте в приповерхностном слое атмосферы Марса в месте посадки;
- измерение плотности грунта и температуры верхнего слоя грунта
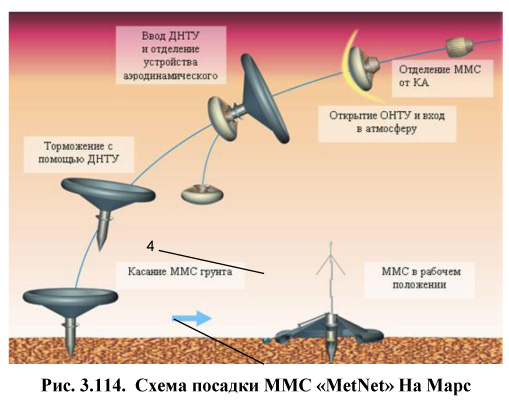 Торможение ММС на первом этапе осуществляется при помощи пневматического тормозного устройства в виде тора с наружным диаметром 1,0 м. На этом этапе происходит основное уменьшение скорости аппарата с гиперзвуковой в момент входа в атмосферу (число Маха М ~ 29) до скорости М ~ 0,8. Максимальная продольная перегрузка на этом этапе не превышает 29 единиц.
Торможение ММС на первом этапе осуществляется при помощи пневматического тормозного устройства в виде тора с наружным диаметром 1,0 м. На этом этапе происходит основное уменьшение скорости аппарата с гиперзвуковой в момент входа в атмосферу (число Маха М ~ 29) до скорости М ~ 0,8. Максимальная продольная перегрузка на этом этапе не превышает 29 единиц.Для торможения ММС на втором, заключительном, этапе спуска в атмосфере используется дополнительное надувное тормозное устройство (ДНТУ), представляющее собой тор с внешним диаметром 1,8 м. При вводе в действие (наполнении) ДНТУ первичное устройство аэродинамического торможения отбрасывается.
При контакте с поверхностью происходит внедрение в грунт носовой части корпуса ММС.
Схема посадки ММС показана на рис. 3.124.
 После посадки метеостанции на поверхность Марса раскрываются две штанги: одна телескопически выдвигается вверх на высоту 1 метр, а другая - откидывается на поверхность. На вертикальной штанге укреплены антенна, панорамная телекамера, датчик скорости ветра и разнесенные по длине штанги датчики температур, именно благодаря им предполагается провести градиентные измерения температуры приповерхностного слоя. На другой штанге расположены датчик влажности и датчик температур.
После посадки метеостанции на поверхность Марса раскрываются две штанги: одна телескопически выдвигается вверх на высоту 1 метр, а другая - откидывается на поверхность. На вертикальной штанге укреплены антенна, панорамная телекамера, датчик скорости ветра и разнесенные по длине штанги датчики температур, именно благодаря им предполагается провести градиентные измерения температуры приповерхностного слоя. На другой штанге расположены датчик влажности и датчик температур.Масса малой метеостанции - 19,0 кг. Масса комплекса полезной нагрузки ММС - 2,5 кг.
ММС могут доставляться на Марс в качестве дополнительной полезной нагрузки при полете марсианских АМС. По состоянию на 2004 год предполагался запуск нескольких ММС в 2009-2011 годах, в том числе с АМС «Фобос-Грунт». Общее количество станций планировалось довести до 15-20.
В 2009 году было принято решение не запускать ММС совместно с АМС «Фобос-Грунт», в связи с чем разработка малых метеостанций ММС была прекращена, однако, предложения о создании на Марсе сети метеостанций продолжали высказываться.
5.5.2.3. Проект «Марс-НЭТ»
Проект комплекса «Марс-НЭТ» появился в планах НПО им. С.А. Лавочкина в начале 2010-х годов. «Марс-НЭТ» является развитием проекта «InterMarsNet», который прорабатывался вместе с NASA в конце 1990-х годов.
Задачей комплекса является непрерывный и глобальный мониторинг климата и сейсмообстановки на Марсе, а также навигационное обеспечение для марсианских АМС.
Согласно проекту должна быть создана и запущена к Марсу АМС, несущая до 10 отделяемых зондов. При приближении АМС к Марсу зонды последовательно отделяются и совершают посадку на поверхность планеты в различных точках, а базовый блок АМС выходит на околомарсианскую орбиту.
Масса одного зонда - около 25 кг. Масса АМС при старте - 8 120 кг, в т.ч. 50 кг научной аппаратуры на базовом блоке. Запуск рассчитан на РН «Союз-2».
По состоянию проекта на 2009 год предлагавшийся срок запуска комплекса «Марс-НЭТ» - 2016 год. Проект не был включен в Федеральную программу, поэтому не финансировался и не прорабатывался.
6.1. Исследования внешних планет
  |
1 Название АМС условное.
В 2004 году были опубликованы некоторые данные по проекту АМС для полета к спутнику Юпитера Европе, который прорабатывался в НПО им. С.А. Лавочкина.
В состав АМС входят:
- служебный модуль с исследовательской аппаратурой;
- ядерная энергетическая установка (ЯЭУ);
- электроракетная двигательная установка (ЭРДУ);
- жидкостная ракетная двигательная установка (ЖРДУ).
Стартовая масса АМС составляет от 18,84 т (при исполь-зовании РН «Протон-М») до 21,45 т (РН «Ангара-5»)
После вывода АМС на опорную орбиту ИСЗ выполняется разгон с помощью РБ, работающего на химическом топливе, после чего включается ЭРДУ, питающаяся от ЯЭУ. Выполнив «по спирали» набор скорости до второй космической, АМС переходит на траекторию полета к Юпитеру, где переходит сначала на около-юпитерианскую орбиту сопровождения Европы, а затем на орбиту спутника Европы. Переход торможением выполняется также «по спирали».
Расчетная масса АМС на орбите Европы 6,9-9,6 т в различных вариантах выбранных траекторий, в т.ч. 1,25 т - масса научной аппаратуры. Общее время полета составляет 6,0-7,7 лет.
На рис. 3.127 и 2.128 показан общий вид КА при полете к Юпитеру и на орбите вокруг Европы. При выходе на эту орбиту производится ориентация КА при помощи ЖРД малой тяги продольной осью на поверхность спутника Юпитера и развертывание радиолокационной антенны, которая в сложенном состоянии находилась внутри блока баков ЭРДУ. При необходимости коррекция орбиты может проводиться двигателями малой тяги, работающими на гидразине.
6.1.6. Проект «Лаплас»
6.1.6.1. Начальный проект (Европа)
Институт космических исследований Российской академии наук в 2008 году в контакте с ESA начал организацию работ по подготовке полета АМС к Европе с посадкой на поверхность. Исследования Европы, на которой, как считается, под ледяным покровом находится жидкий океан, крайне интересны в научном плане.
Проект получил название «Лаплас» - как бы являясь российским продолжением европейского проекта «Laplace», который также предусматривал запуск АМС к Европе, но был остановлен после достигнутого между ESA и NASA соглашения о совместной работе по проекту EJSM («Europa Jupiter System Mission»).
АМС «Лаплас» состоит из перелетного, орбитального и посадочного модулей. Перелет к Юпитеру должен выполняться с использованием гравитационных маневров у Земли - три раза, и у Венеры - один раз. Рассматривается возможность использования электрореактивных двигателей малой тяги, в этом случае количество гравитационных маневров сокращается до одного.
Масса орбитального модуля составит 800 кг (при использовании радиоизотопных источников электроэнергии) или 940 кг (при использовании солнечных батарей). Масса научной аппаратуры - 50 кг. Орбитальный модуль после многократных пролетов спутников Юпитера - Ганимеда, Каллисто и Европы, - должен быть выведен на орбиту спутника Европы высотой около 100 км. Орбитальный модуль несет как научную аппаратуру, так и ретрансляционное оборудование для обеспечения связи наземных станций с посадочным модулем. Аппаратура должна иметь радиационную защиту.
Масса посадочного модуля - 1 210 кг, в том числе масса научной аппаратуры - 50 кг. Расчетное время работы посадочного модуля на поверхности Европы - 60 суток. Предполагается, что модуль будет нести устройство для бурения поверхности глубиной до 30 см, а также, возможно, устройство для измельчения грунта для его всестороннего исследования.
В проекте АМС «Лаплас» предполагается использование конструкторского задела по проектам «Луна-Глоб» и «Луна-Ресурс».
Запуск АМС предполагалось осуществить в 2022-2023 году с использованием РН «Протон-М» или «Ангара». Длительность перелета составит приблизительно 6,5 лет.
6.2. Исследования Меркурия
6.2.2. Проект «Меркурий-П»
Проект АМС «Меркурий-П» для осуществления мягкой посадки на Меркурий разрабатывался в НПО им. С.А. Лавочкина 2003-2011 годах. Запуск АМС к Меркурию планировался на 2019 год.
6.3. Исследования комет и астероидов
 6.3.3. Проект «Апофис»
6.3.3. Проект «Апофис»В 2010 году была опубликована информация, что к включению в Федеральную космическую программу на 2016-2025 гг. готовится проект разработки АМС «Апофис» для исследования одноименного астероида. Астероид Апофис имеет орбиту, периодически пересекающую орбиту Земли в потенциально опасной близости.
Основные задачи АМС:
- уточнение основных характеристик и параметров орбиты астероида;
- дистанционные и, возможно, контактные исследования его поверхности;
- проверка эффективности метода «гравитационного трактора» - отклонения астероида с орбиты, угрожающей столкновением с Землей.
Предлагавшийся срок запуска АМС - 2020 г.
6.3.5. Проект «Комета-Грунт»
В 2006 году НПО им. С.А. Лавочкина выдвинуло предложение о разработке АМС «Комета-Грунт» для доставки на Землю вещества одной из комет. Возможный срок запуска оценивался, как 2018 г.
6.4. «Солнечные» АМС
 6.4.5.3. АМС «Интергелиозонд»
6.4.5.3. АМС «Интергелиозонд»К 2005 году проект «Интергелиос» стал чисто российским, а название трансформировалось в «Интергелиозонд».
По уточненным проработкам предлагается с помощью гравитационных маневров у Венеры вывести АМС на околосолнечную орбиту с перигелием 42 млн. км (60 солнечных радиусов) с последующим снижением до 30-40 радиусов и, возможно, далее до 10-12 радиусов.
Основное назначение: исследования параметров излучений Солнца с близких расстояний c высокой чувствительностью и разрешением в оптическом, ультрафиолетовом, рентгеновском и гамма-диапазонах, параметров солнечного ветра для решения проблем разогрева солнечной короны и ускорения солнечного ветра, происхождения солнечных вспышек и коронарных выбросов плазмы.
Состав научной аппаратуры:
- рентгеновский телескоп;
- рентгеновский спектрометр;
- магнитограф;
- коронограф;
- оптический фотометр;
- анализатор ионов солнечного ветра;
- анализатор электронов солнечного ветра;
- анализатор плазмы и пыли;
- магнито-волновой комплекс;
- магнитометр;
- детектор энергичных частиц;
- детектор солнечных нейтронов;
- гамма-спектрометр;
- радиоспектрометр.
АМС должна быть оборудована теплозащитным экраном и двигателями малой тяги для выполнения орбитальных маневров. Сопутствующей задачей называется возможное исследование Меркурия при близких пролетах. Расчетный срок активного существования - 5 лет.
Масса АМС 8 120 кг, в т.ч. масса научных приборов - около 120 кг. Запуск рассчитывался на РН «Союз-2».
Предлагавшийся срок запуска - 2010 год, затем 2012, 2014, 2017 год. К 2012 году возможный срок запуска определялся, как не ранее 2020 года.
6.4.5.4. Проект «Полярный эклиптический патруль»
Проект предусматривал выведение двух АМС на гелиоцентрические круговые орбиты радиусом 0,5 а.е., наклоненные к плоскости эклиптики для наблюдения за полярными областями и обратной стороной Солнца.
6.5. КА в точках Лагранжа
 6.5.1.2.2. Проект 2002 года
6.5.1.2.2. Проект 2002 годаВ 2002 году вместо «тяжелого» ИСЗ «Спектр-РГ» были начаты работы по проекту «легкого» КА с рентгеновскими телескопами. КА было предложено вывести в точку либрации L2 системы Земля-Солнце.
На конкурсной основе рассматривалось два проекта:
- проект РКК «Энергия» на платформе «Ямал»;
- проект НПО им. С.А. Лавочкина на базе платформы «Навигатор».
Советом по космосу РАН был выбран второй вариант.
КА «Спектр-РГ» должен нести два рентгеновских телескопа:
- ART-XC российской разработки;
- eROSITA, разработанный в Германии.
Расчетное время работы АМС «Спектр-РГ» - 7,5 лет.
Стартовая масса АМС - 2 385 кг, из них 370 кг - масса топлива. Запуск КА «Спектр-РГ» был запланирован на 2014 год с помощью РН «Зенит-2SБ» и РБ «Фрегат».