«Mars Reconnaissance Orbiter» (MRO)
12 августа, 11:43, 2005 года - старт
три коррекции
10 марта 2006 года - вышел на орбиту ИС Марса
7 апреля - 11 сентября 2006 года - сформирована штатная орбита
2 июля 2014 года - коррекция для уклонения от кометы
27 августа 2014 года - коррекция для уклонения от кометы
19 октября 2014 года - пролёт кометы
активен
|

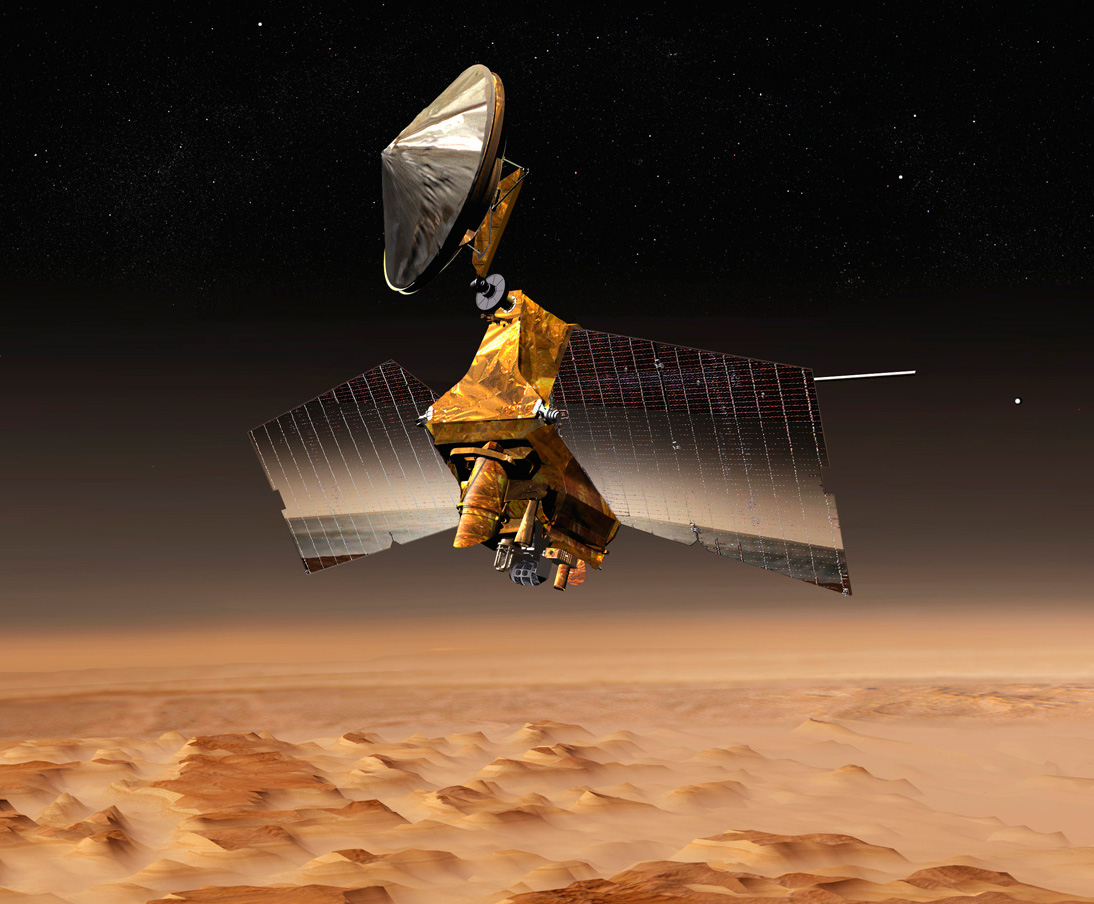
На снимке с инструмента HiRISE на борту Mars Reconnaissance Orbiter (MRO) НАСА на Олимпе Монс на Марсе видна трещина шириной менее 500 метров в самом широком месте |
?
Новости космонавтики 1995 №16-17:
США. Выбран прибор для КА "Марс Орбитер"
21 июля. Сообщение НАСА. Принято решение о размещении на борту АМС "Марс Орбитер" прибора для исследования атмосферы Марса - инфракрасного радиометра PMIRR (Pressure Modulator Infrared Radiometer).
PMIRR был выбран для размещения на станции по рекомендации специальной группы д-ра Джеффри Бриггса (Geoffrey Briggs), директора Исследовательского центра миссии к Марсу в Исследовательском центре имени Эймса НАСА.
АМС "Марс Орбитер" должна быть запущена в конце 1998 г. и выведена на орбиту спутника Марса. PMIRR будет строить вертикальный профиль разреженной атмосферы Марса путем измерения инфракрасного излучения, отраженного от горизонта планеты. По этим данным возможно восстановить графики температуры, уровня водяного пара и содержания пыли до поверхности планеты до высоты 80 км. Полученная информация будет использована для построения более точных моделей природной среды Марса.
Ведущим исследователем по эксперименту PMIRR является д-р Дэниел Мак-Клиз (Daniel McCleese) из Лаборатории реактивного движения НАСА.
PMIRR был одним из семи экспериментов, размещенных первоначально на борту КА "Марс Обсервер'', которая вышла из строя при подлете к Марсу 21 августа 1993 г. Чтобы реализовать научную программу, запланированную для "Обсервера", пять экспериментов были перенесены на АМС "Марс Глобал Сервейор", которая должна быть запущена в ноябре 1996 г. Еще один прибор с "Обсервера", гамма-спектрометр GRS (Gamma Ray Spectrometer) , теперь планируется разместить на борту следующего американского спутника Марса в 2001 г. При помощи GRS будет изучаться химический состав поверхности Марса.
Выбор инструмента позволит определить массу и электропотребление научной аппаратуры станции, которая изготавливается "Lockheed Martin Astronautics" в Денвере, Колорадо.
В состав ПН "Марс Обсервер" войдет также оптическая камера. Проводимый в настоящее время конкурс предложений на создание этой камеры должен закончиться в октябре текущего года.
Сиддики:
Научные инструменты:
1. камера с высоким разрешением (HiRISE)
2. контекстная камера (CTX)
3. Марсианский цветной томограф (MARCI)
4. компактный разведывательный спектрометр (CRISM)
5. Марс климат-эхолот (MCS)
6. подземный радар (SHARAD)
7. Оптическая навигационная камера
8. Пакет для исследований электрических полей
9. Пакет исследований гравитационного поля
10. Исследование структуры атмосферы
Результаты: Mars Reconnaissance Orbiter (MRO) - это большой орбитальный аппарат, частично построенный по образцу очень успешного космического корабля NASA Mars Global Surveyor, предназначенного для фотографирования Марса с орбиты в течение примерно двух земных лет. Его основными целями было нанесение на карту марсианской поверхности с помощью камеры высокого разрешения (рефлектор HiRISE диаметром 0,5 метра, самый большой из когда-либо доставленных в дальний космос), по крайней мере частично, чтобы помочь в выборе мест для будущих миссий по приземлению. Дополнительные исследования включали изучение марсианского климата, погоды, атмосферы и геологии. Наряду с шестью основными приборами, MRO также нёс оптическую навигационную камеру и Electra, телекоммуникационный пакет УВЧ, чтобы обеспечить навигационную и коммуникационную поддержку для других наземных и марсоходов на поверхности Марса. После запуска MRO вышел на орбиту вокруг Земли. Вскоре после этого верхняя ступень "Центавра" включилась вторично, чтобы отправить свою полезную нагрузку (и себя), на траекторию перехвата Марса. После семимесячного путешествия по межпланетному пространству и трех промежуточных коррекций MRO приблизился к Марсу и 10 марта 2006 года запустил свои шесть двигателей (которые показали слегка уменьшенную тягу) и успешно вышел на высокоэллиптическую орбиту вокруг Красной планеты с параметрами 426 х 44 500 километров с периодом 35,5 часов. Последующая комбинация аэробрейкинга в верхних слоях атмосферы и включений двигателей в период с 7 апреля по 11 сентября 2006 года привела к тому, что MRO вышел на свою штатную рабочую орбиту приблизительно 250 х 316 километров. Два месяца спустя он начал свою основную научную миссию, присоединившись к пяти другим активным космическим аппаратам на орбите или на поверхности Марса: Mars Global Surveyor, 2001 Mars Odyssey, два марсохода и европейский Марс Экспресс. К декабрю 2006 года работа одного из приборов MRO, климатического эхолота Марса, была приостановлена из-за аномалий в его поле зрения. Однако все остальные инструменты присылали огромное количество непрерывных и ценных данных в течение первых двух лет работы MRO, известной как фаза первичной науки, которая продолжалась с ноября 2006 года по ноябрь 2008 года. Одним из ранних результатов, полученных с помощью изображений, собранных HiRISE, было присутствие жидкой двуокиси углерода или воды на поверхности Марса в его недавнем прошлом. На расширенном научном этапе, с ноября 2008 года по декабрь 2010 года, MRO столкнулся с рядом технических препятствий, в первую очередь связанных с, по-видимому, самопроизвольной перезагрузкой своего компьютера в 2009 году четыре раза. В какой-то момент космический аппарат по существу был отключён с 26 августа. Наконец, 8 декабря инженеры вывели орбитальный аппарат из «безопасного режима» и начали медленно развёртывать научные операции с использованием своих научных инструментов. Вернувшись к работе, MRO преодолел важный символический рубеж 3 марта 2010 года, когда достиг 100 терабит данных, передаваемых на Землю, что, по словам НАСА, «в три раза превышает объем данных из всех других КА в дальнем космосе, вместе взятых». MRO продолжал присылать данные высокого качества, несмотря на еще одно событие перезагрузки в сентябре 2010 года. Многие из его действий были скоординированы с другими космическими марсианскими аппаратами. Например, в декабре 2010 года исследователи использовали данные инструмента CRISM, чтобы помочь марсоходу Opportunity изучить распределение минералов в кратере Endeavour в грунте. Новый этап миссии MRO начался в декабре 2010 года, Расширенная миссия, целью которой было изучение сезонных процессов на Марсе, поиск изменений поверхности, а также оказание поддержки другим марсианским космическим аппаратам, включая Научную лабораторию Марса (MSL). Именно в этот период, в марте 2011 года, MRO исполнилось пять лет на орбите Марса. Позже в августе НАСА объявило, что данные MRO указывают на то, что вода действительно может течь на Марсе в самые теплые месяцы года; на снимках MRO были показаны темные, похожие на пальцы объекты, известные как линия повторяющихся уклонов (RSL), которые появляются и исчезают на некоторых склонах в конце весны и летом, но исчезают в течение зимы. 14 марта 2012 года MRO засняло 20-километрового пылевого дьявола, петляющего через район Амазонис Планития на севере Марса. Позже, в октябре 2012 года, НАСА инициировало вторую расширенную миссию MRO, срок действия которой истек в октябре 2014 года. В конце 2013 года MRO перевел взгляд на комету ISON, комету, мчащуюся из Облака Оорта, которая прошла возле Марса 29 сентября. Во время этой второй Расширенной Миссии MRO преодолел рубеж передачи 200 терабитов научных данных на Землю. Один раз на борту космического аппарата возникла компьютерная аномалия: 9 марта 2014 года MRO перешёл в безопасный режим после незапланированного переключения с одного основного компьютера на другой. Четыре дня спустя машина возобновила нормальную научную деятельность (наряду с ее действиями по передаче данных на Землю с ровера Curiosity). Из-за надвигающегося пролёта Марса Comet C/2013A1 (или Comet Siding Spring) 19 октября 2014 года НАСА начало смещать орбиту MRO (а также своего другого оперативного орбитального аппарата, Марс Одиссей 2001 года), чтобы минимизировать риск повреждения от материала, выброшенного с кометы. Корректировки орбиты были сделаны MRO 2 июля, а затем снова 27 августа. В этом случае MRO запечатлел лучшие из когда-либо виденных комет из Облака Оорта, когда Siding Spring пролетел над Марсом 19 октября. Космический аппарат не пострадал в результате пролёта. В седьмой раз за время работы на орбите MRO перешел в режим ожидания 11 апреля 2015 года, когда произошел незапланированный переход с одного главного компьютера на другой. В течение недели космический аппарат снова вернулся в полную работоспособность. Позднее, в январе 2016 года, операторы завершили запланированное переписывание флэш-памяти на одном из избыточных компьютеров космического аппарата, чтобы загрузить новые данные в виде таблиц о положениях Земли и Солнца. Ранее, в августе 2015 года, MRO отметило десятилетие со дня своего запуска, к которому облетел Марс 40000 раз и возвратил 250 терабит данных; НАСА объявило, что каждую неделю космический аппарат все еще возвращал на Марс больше информации, чем общее количество всех других активных миссий на Марсе за неделю. Вскоре после этого, в сентябре 2015 года, ученые опубликовали в журнале Nature Geoscience данные о том, что данные, полученные с помощью спектрометра для визуализации MRO, являются самым убедительным доказательством того, что жидкая вода все еще периодически течет на современном Марсе. Позже ученые пришли к выводу, что водяной лед составляет половину или более подземного слоя в регионе Utopia Planitia. В июле 2016 года были опубликованы результаты исследований, свидетельствующих о том, что овраги на современном Марсе - каналы с альковом наверху и осажденным материалом на дне - вероятно, не были сформированы проточной жидкой водой, а вместо этого, возможно, из-за замерзания и оттаивания замёрзшего углекислого газа. Данные MRO также послужили основой для большого эксперимента с краудсорсингом в 2016 году. Используя веб-сайт Planet Four: Terrains, десять тысяч добровольцев использовали изображения (снятые с помощью контекстной камеры) южных полярных регионов Марса для определения целей для более близкого осмотра (с помощью камеры HiRISE), что позволяет получить новое представление о сезонных плитах углекислого газа и эрозионных свойствах на Марсе, известных как «пауки». 28 сентября 2016 года MRO должен был обеспечить критически важную коммуникационную поддержку для прибытия на посадочную площадку InSight Mars (частично благодаря орбитальному маневру, выполненному более года назад, 29 июля 2015 года). Однако запуск InSight был отложен до 2018 года из-за проблем с разработкой одного из его инструментов, а также из-за относительной краткости стартового окна запуска, выбранного для миссии. Во время своей миссии MRO сфотографировала искусственные объекты на поверхности Марса. В январе 2015 года НАСА объявило, что изображения высокого разрешения, сделанные MRO, опознали обломки Beagle 2 на марсианской поверхности. Аналогичным образом, снимки, сделанные в декабре 2014 года и апреле 2015 года прибором HiRISE, также показывают марсоход Curiosity НАСА в кратере Гейл. Позже, в октябре 2016 года, на изображениях, снятых как с помощью контекстной камеры, так и с помощью камеры HiRISE, был обнаружен испытательный аппарат ЕКА Скиапарелли, который прекратил передачу до посадки. В начале 2017 года, спустя почти 11 лет после прибытия на Марс, MRO остается в рабочем состоянии и является вторым самым долгоживущим космическим кораблем на орбите Марса после "Марс Одиссей" 2001 года.