Mariner- 69F
Mariner-F
| 25 февраля 1969 01:29:02 - старт 1 марта 1969 - коррекция 31 июля 1969 05:19:07 пролёт в СД Марса на расстоянии 3429 км. гелиоц. орбита (1,14 х 1,75 а.е.) середина 1971 - потеря связи |
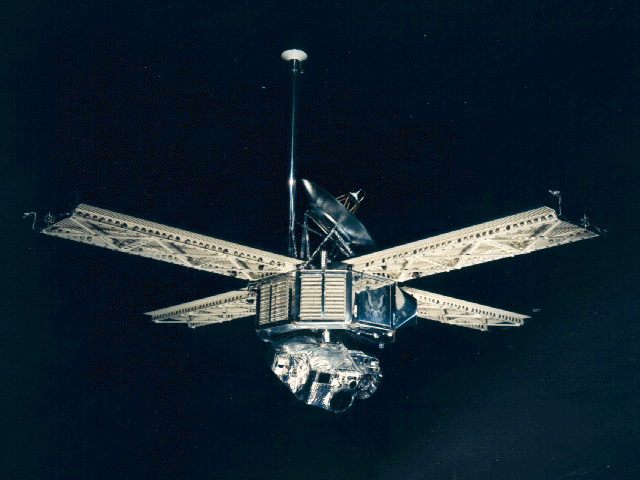
«Маринер VI» и «Маринер VII» («Маринер F» и «Маринер G»)1. Два аналогичных КА, предназначенных для продолжения исследований Марса с пролетной траектории и для подготовки к исследованиям планеты в 1971 г. аппаратами «Маринер-71» и в 1975 г. аппаратами «Викинг». Основные задачи полета: получение изображений Марса; определение температуры, плотности, давления и состава атмосферы Марса; измерение температуры поверхности Марса на дневной и ночной сторонах; уточнение некоторых астрономических величин путем анализа траекторных измерений; получение научно-технической информации для использования ее при создании КА «Маринер-71» и «Викинг». Вес КА 385 кг (по некоторым источникам 413 кг), общая высота, включая антенну, 3,85 м. Корпус имеет форму восьмигранной призмы, максимальный поперечный размер 1,38 м, высота 0,45 м. Он разделен на 8 отсеков, в которых размещены: устройства для подзарядки батарей; корректирующий двигатель; программно-временное устройство (ПВУ) и оборудование системы ориентации; оборудование телеметрической и командной систем; записывающие устройства; приемник и передатчики; системы обработки данных и электронное оборудование научных приборов; батарея и регуляторы системы электропитания. К корпусу крепятся 4 панели (2,13x0,9 м) с солнечными элементами, к торцам панелей - блоки управляющих реактивных сопел, обеспечивающих ориентацию по трем осям. На верхнем днище установлены остронаправленная и всенаправленная антенны, датчик Канопуса и два основных солнечных датчика, на нижнем - 4 вспомогательных солнечных датчика, баллон со сжатым азотом для реактивных сопел и сканирующая (поворотная) платформа с приборами. Источник электропитания - 17 472 солнечных элемента (800 вт - при старте, 450 вт - у Марса) и подзаряжаемая серебряно-цинковая батарея. ПВУ обеспечивает автоматическую выдачу команд в соответствии с заложенной программой. Система терморегулирования пассивно-активная: многослойная теплоизоляция из тефлона с алюминиевым покрытием, жалюзи из полированного металла, электронагреватели, специальные красочные покрытия. Радиотехническая система включает сдублированный передатчик и приемник. Система ориентации включает солнечные датчики, датчик Канопуса, инерциальный измерительный блок (3 гироскопа), 12 реактивных сопел. В период работы корректирующего двигателя ориентация космического аппарата обеспечивается по командам инерциального измерительного блока четырьмя газовыми рулями, помещенными в истекающую струю. На сканирующей платформе установлены две телевизионные камеры: с широкоугольным объективом (камера А) и телеобъективом (В); ультрафиолетовый спектрометр для определения плотности и температуры марсианской атмосферы; инфракрасный спектрометр для исследования состава атмосферы Марса.
1Эти аппараты называют также «Маринер-69».
Запуск КА «Маринер VI» был осуществлен 25 февраля в 1 час 29 мин ракетой-носителем «Атлас-Кентавр». Коррекция траектории была проведена 28 февраля, полет проходил нормально. На подлете к Марсу с помощью камеры В было получено 50 снимков: 33 с расстояния 1,24-0,72 млн. км и остальные с расстояния 760-180 тыс. км. 31 июля в 5 час 4 мин началось получение пролетных снимков с расстояния 7725 км (камеры А и В). Съемка продолжалась 17 мин, от каждой камеры получено по 12 снимков. В 5 час 19 мин КА прошел на минимальном расстоянии от поверхности Марса (3430 км), скорость относительно планеты составила 7882,5 м/сек, расстояние до Земли 95,7 млн. км. Общая протяженность траектории КА от Земли до Марса составила 388 млн. км.
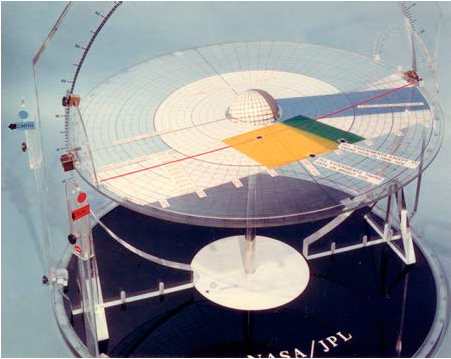 Модель проектирования траектории, показанная выше, позволила планировщикам миссий Mariner в 1967 году рассчитать ожидаемый путь космического корабля Mariner VI и VII, а также окно возможностей для инструментов и телевизионных камер для работы во время пролета. |