Новости космонавтики 1998 №10:
Быстрее, умнее, самостоятельнее!
С.Карпенко по сообщению UPI.
Инженеры NASA заняты разработкой марсохода (ровера) нового поколения. За основу взяты результаты работ по роверу Sojourner миссии Mars Pathfinder.
Sojourner представлял собой 11-килограммовую тележку, размером и видом напоминающую роликовую доску. Находясь на марсианской поверхности, ровер преодолевал в день по 2-3 метра и останавливался через каждые 7 см, чтобы с помощью собственных приборов навигации определить наиболее безопасное направление для дальнейшего движения. Раз в день управленцы с Земли выдавали ему инструкции, определяющие, куда двигаться дальше, что снимать видеокамерой и какие эксперименты выполнить.
Для будущих экспедиций АМС как к Марсу, так и к другим небесным телам - астероидам, кометам - ровера с такими возможностями будет недостаточно. Поэтому глава группы его разработчиков Джекоб Матиевич (Jacob Matijevic) из Лаборатории реактивного движения сформулировал в журнале Sience требования к марсоходу для проекта Mars Surveyor 2001 следующим образом:
- расстояние, пройденное за день, должно составлять около 100 м, то есть столько же, сколько прошел Sojourner за свое 11-недельное существование;
- ровер, собирающий и анализирующий образцы породы, должен стать более независимым как при определении собственного местоположения, так при принятии решений в случае возникновения непредвиденных сложностей, таких как объезд препятствий на пути, определение наиболее безопасного маршрута для движения и т.д. Следовательно, он должен иметь на борту мощный компьютер. Компьютер даст также возможность с помощью собственной камеры и программного обеспечения для распознавания изображений моделировать карту препятствий, что в свою очередь позволит осуществлять навигацию по определенным ориентирам местности, а не по пройденному пути.
Sojourner не обладал перечисленными свойствами. Например, свое местоположение он определял с помощью станции Mars Pаthfinder, и как только он исчезал из поля зрения посадочного аппарата или отъезжал слишком далеко от нее, начинались проблемы с управлением.
Автономность ровера будет все же не полная, он останется зависимым от наземной группы управления.
По мнению Пола Шенкера (Paul Schenker), специалиста по робототехническим системам NASA, конструкторам надо сконцентрировать усилия на трех направлениях усовершенствования подобных аппаратов. Ровер должен обладать способностью самостоятельно ориентироваться на местности, автономно обрабатывать собранные им данные и, исходя из реальных условий, принимать оптимальное решение о дальнейших действиях с учетом уже заложенного плана работ.
Кроме того, Шенкер сообщил о программах по созданию автоматических «аэроботов» и «диггеров». Первые представляют собой атмосферные зонды - воздушные шары, предназначенные для проведения съемок и картирования местности, на которой предполагается работать будущим марсоходам. А вторые предназначены для проведения приповерхностных «земляных работ», цель которых - определение химического состава грунта, а также поиск воды или льда вблизи поверхности. Такие аппараты могут быть полезны при исследовании комет для сбора и анализа кометного вещества.
Сиддики:
Научные инструменты:
1. Панорамная мачта в сборе
а. панорамные камеры (Pancam)
б. навигационные камеры (Navcam)
с. миниатюрный термоэмиссионный спектрометр (Mini-TES)
2. Мессбауэровский спектрометр (MB)
3. Рентгеновский спектрометр альфа-частиц (APXS)
4. магниты (для сбора частиц пыли)
5. микроскопический имиджер (MI)
6. инструмент для истирания породы (RAT)
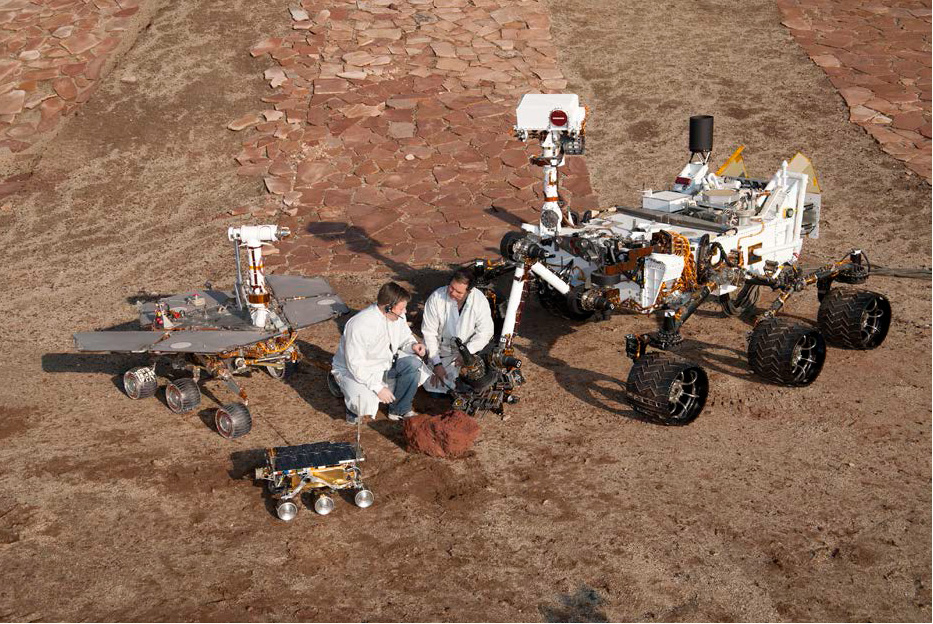
Изображение, показывающее три поколения марсоходов, разработанных в JPL в Пасадене, штат Калифорния. Они выставлены здесь на "марсианском" полигоне JPL в Пасадене. В центре - дублёр (названный «Мари Кюри») «Соджорнера», который приземлился на Марсе в 1977 1997 году как часть "Mars Pathfinder". Слева находится тестовый марсоход проекта Mars Exploration Rover, который является «родным братом» для «Спирит»и «Оппортунити», оба приземлились в 2004 году. Наконец, справа - наземная модель размером с Curiosity, который приземлился в 2012 году. Показанные инженеры JPL - Мэтт Робинсон (слева) и Уэсли Кайкендалл. |
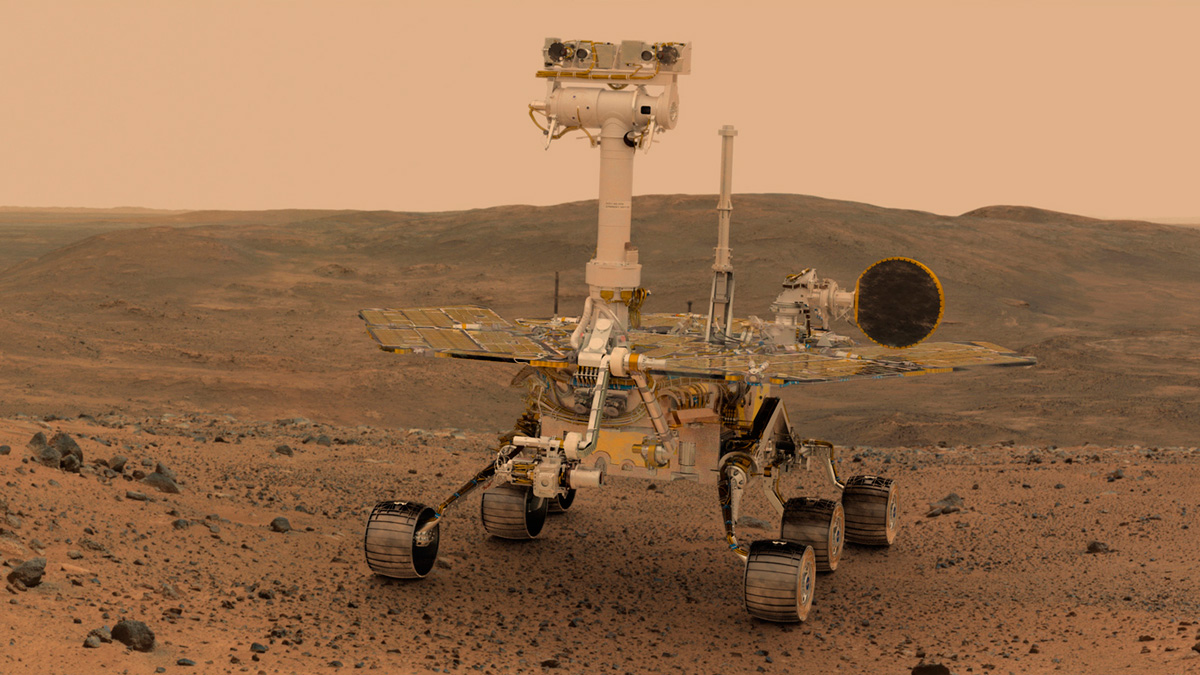
Результаты: «Спирит»и «Оппортунити» были двумя марсоходами, которые вместе представляли Миссию Rover Exploration Rover (MER), которая сама является частью программы НАСА по исследованию Марса. Основная научная цель миссий-близнецов состояла в том, чтобы найти ряд пород и типов почвы, а затем найти следы прошлой активности воды на Марсе. Каждый марсоход размером с тележку для гольфа и в семь раз более тяжелый (185 кг), чем марсоход «Соджорнер» на «Марс Патфайндер», был нацелен на противоположные стороны планеты в местах, где в прошлом подозревалось воздействие жидкой воды. Планировалось, что роверы будут перемещаться с места на место, проводить геологические исследования на месте и делать фотографии с помощью установленных на мачте камер (примерно на 1,5 метра от земли), обеспечивающих на 360° стереоскопический обзор местности. Набор инструментов (MB, APXS, магниты, MI и RAT) были развернуты на манипуляторе (известном как прибор для развертывания инструментов, IDD). Рука поместила бы инструменты прямо на землю или камень и активировала инструменты. Весь космический аппарат был запущен на промежуточную опорную орбиту вокруг Земли 163 х 4762 километра при наклоне 28,5°, после чего верхняя ступень PAM-D запустилась, чтобы отправить его на гелиоцентрическую орбиту по траектории для перехвата Марса. Коррекция в середине пути последовала 10 дней спустя. После еще трех коррекций космический аппарат «Cruise Stage, Круизная ступень», на котором находился марсоход «Спирит», приблизился к Марсу для приземления 4 января 2004 года. Примерно за 15 минут до входа в атмосферу спускаемый аппарат (внутри его защитного аэрооболочки) отделился от перелётного модуля. На высоте от 6 до 7,5 км был развернут парашют, а через 30 секунд был выпущен нижний теплозащитный экран. В течение следующих 10 секунд ровер разматывал «уздечку» (или трос), все еще спускаясь со скоростью 70 метров в секунду. Вскоре после этого надулись четыре массивные воздушные подушки того же типа, что и на «Марс Патфайндер», после чего запустились тормозные ракеты у основания парашюта и работали до тех пор, пока спускаемый аппарат не оказался на расстоянии около 8,5 метров от земли. Тормозные ракеты были необходимы, поскольку марсианская атмосфера составляет менее 1% плотности Земли, и одни только парашюты не могут снизить скорость. Весь пакет упал на марсианский грунт в 04:26 со скоростью 14 метров в секунду, отскочив в общей сложности 28 раз, а затем катился до остановки на расстояние 250–300 метров от точки первого удара. Координаты посадки были 14,5692° ю.ш./175,4729° в.д., примерно в 13,4 км от запланированной цели, внутри кратера Гусева. Область была отныне известна как Мемориальная станция Колумбии. После этого посадочный аппарат передал данные через «Марс Глобал Сервейер». Примерно через полтора часа после приземления и после сдувания подушек безопасности MER-A развернул свои солнечные панели с лепестками, теперь передавая информацию на Землю через «Марс Одиссей». Сразу после этого «Спирит» начал передавать захватывающие изображения на Землю. Ровер столкнулся с серьезной проблемой 21 января 2004 года, когда сеть Deep Space Network НАСА потеряла связь. Из-за проблемы в подсистеме флэш-памяти «Спирит»ровер перешел в «режим неисправности». К счастью, операторы смогли переформатировать флэш-память и отправить программный патч (чтобы предотвратить перегрузку памяти). Нормальные операции возобновились 5 февраля, и на следующий день «Спирит» использовал свой инструмент для абразивной обработки камня (RAT), чтобы очистить поверхность камня (названный «Адирондак»), подвиг, совершенный впервые на Марсе. Исследование экспонированного интерьера позволило ученым получить важную информацию о составе скального грунта. Первоначально запланированная миссия должна была продлиться 90 марсианских дней (примерно до 4 апреля 2004 года). Тем не менее, планировщики миссий были в состоянии неоднократно формулировать расширенные миссии далеко за пределы первоначальной жизни ровера. Некоторые из последующих ярких событий включали посещение кратера Бонневиль, находящегося примерно в 370 метрах от его первоначальной точки приземления, а затем до основания Колумбийских холмов, где он провел длительный период времени. К 2005 году марсоход начал медленно подниматься в гору к вершине холма Husband Hill, по скалистой и песчаной местности. Он останвливался во многих местах для исследования, часто используя RAT. В марте 2005 года случилось странное событие, проходящие "пыльные дьяволы" смели пыль с верха солнечных панелей, увеличив силу, приходящую к «Спирит» от обычных 60% до 93%, что значительно продлило срок службы миссии. 29 сентября 2005 года марсоход наконец достиг вершины холма Husband Hill, небольшой плоской равнины, с которой Спирит мог снимать 360-градусные панорамы в реальном цвете кратер Гусева. В начале следующего года ровер был направлен на северную сторону холма МакКул, где предполагалось, что «Спирит» получит достаточное количество солнечного света для поддержания работ в течение предстоящей марсианской зимы. Поездка в Маккул-Хилл была в конечном счете отменена частично, потому что переднее колесо перестало работать. Эта неисправность оказалась полезной, поскольку неактивное колесо соскребало верхний слой марсианской почвы при движении ровера, обнажая яркую пыль, богатую кремнеземом, что указывало на контакт между почвой и водой. В начале 2007 года контроллеры передали новое программное обеспечение как на «Спирит», так и «Оппортунити». Эти новые программы позволили роверам автономно решать ряд различных действий, например, передавать ли конкретное изображение на Землю или расширять дистанционное управление. Однако в течение большей части (земного) лета 2007 года и «Спирит», и «Оппортунити» сталкивались с массивными пыльными бурями, которые подрывали их способность эффективно работать, главным образом из-за недостатка энергии, генерируемой солнечными батареями. Эти опасения не исчезли в 2008 году, так как очередной зимний шторм в конце этого года еще больше снизил мощность солнечной панели «Спирита» примерно до 89 ватт-часов в сол Марса (номинальная мощность около 700 ватт-часов в день). На таких низких уровнях роверу нужно было прибегнуть к использованию собственных батарей, которые, если бы они разрядились, в основном завершили бы миссию. В течение 2009 года произошел ряд случайных событий, таких как ветер, сдувающий пыль с панелей - медленно увеличивалась мощность, вырабатываемая солнечными панелями. К апрелю 2009 года ровер вернулся к 372 ватт-часам в день, что достаточно для возобновления «нормальной» научной деятельности. К сожалению, вскоре после этого, 1 мая 2009 года, во время движения на юг около западного края низкого плато под названием «Домашняя плита», «Спирит» застрял в мягкой почве, а его колеса не могли цепляться о землю. Впоследствии, 28 ноября, еще одно из шести колес Spirit, правое заднее, перестало работать. К концу января 2010 года, после многих попыток двинуть «Спирит», которые не принесли плодов, планировщики миссий переформулировали миссию «Спирит» как «стационарную научную платформу». Одна из его целей теперь состоит в том, чтобы изучить крошечные колебания во вращении Марса, чтобы определить природу ядра планеты - жидкое или твердое. Однако, чтобы сделать это, ровер нужно было слегка наклонить к северу, чтобы выставить свои панели Солнцу, поскольку зимнее солнце будет находиться на северном небе. В конце концов, желаемый наклон не был достигнут, и после 22 марта 2010 года JPL больше не могла восстановить связь с Духом. Несмотря на то, что до 25 мая 2011 года на «Спирит» было отправлено более 1300 команд, НАСА официально завершила свои усилия по восстановлению. Наиболее вероятной причиной потери контакта была чрезмерный холод, с которым нагреватели для выживания не справились. К тому времени, когда он остановился, «Спирит» прошел 7,73 километра через марсианские равнины. Он проработал 6 лет, 2 месяца и 19 дней.