| 30 мая 1966 года 14:41:01 - старт 31 мая 1966 года - коррекция 2 июня 1966 года 06:17:36 - посадка на Луну 7 января 1967 года - прекращение связи |
Программа «Сервейер». Основное назначение космических аппаратов «Сервейер» - исследование участка лунной поверхности, ограниченной координатами 5° с. ш., 5° ю. ш., 45° з. д., 45° в. д., который намечается для посадки лунной кабины космического корабля Аполлон. Программой предусматривалось запустить 7 экспериментальных аппаратов Сервейер (SC-I...... SC-7)*, предназначенных в основном для отработки мягкой посадки и получения телевизионных изображений поверхности Луны. В 1966 г. запущены два аппарата. После экспериментальных планировалось запустить три отработанных аппарата, оснащенных научными приборами для исследования Луны. Однако 14 декабря NASA объявило, что эти аппараты создаваться не будут и для выполнения программы будет достаточно оставшихся пяти экспериментальных аппаратов. Высота аппаратов-3 м, диаметр описанной вокруг опор посадочного шасси окружности - 4,27 м. Аппараты запускаются с мыса Кеннеди ракетами-носителями «Атлас-Кентавр», схема полета показана на рис. 3.
* До выхода на орбиту эти аппараты называются «Сервейер А»... «Сервейер G».
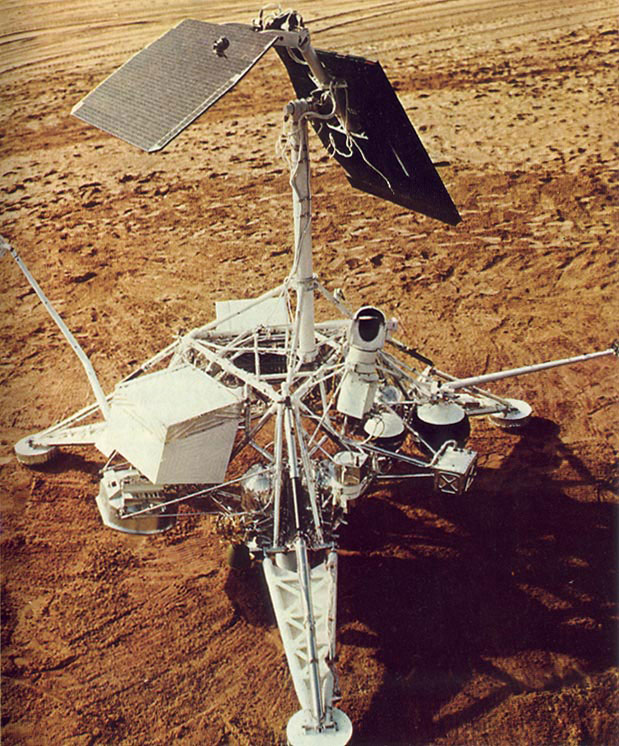
«Сервейер I» («Сервейер А»). Основные задачи полета - испытания ракеты-носителя; систем, обеспечивающих коррекцию траектории; системы мягкой посадки на Луну; а также системы связи с аппаратом. Вес аппарата (рис. 16) при старте составлял 995 кг , после посадки на Луну (т. е. после отделения тормозного РДТТ и выработки запасов топлива для верньерных ЖРД и сжатого азота для управляющих реактивных сопел) - 283 кг. На каркасе аппарата, изготовленного из алюминиевых труб, смонтированы: две конические всенаправленные антенны на стержнях длиной 1,4 м, которые развертываются после вывода аппарата на траекторию полета к Луне; мачта, на которой монтируются остронаправленная антенна и панель с солнечными элементами; два контейнера (А и В) с электронным оборудованием. В контейнере А размещены два приемника, два передатчика, основная батарея и различное оборудование системы электропитания, в контейнере В - декодирующее устройство и другое оборудование командной системы; тормозной РДТТ тягой 3,6-4,5 т (зависит от температуры топливного заряда). Вес снаряженного двигателя 624,6 кг, неснаряженного - 64 кг; три верньерных ЖРД с регулируемой тягой (14-47 кг), работающих на самовоспламеняющемся топливе; трехножное посадочное шасси с алюминиевыми опорами сотовой конструкции; амортизационные блоки сотовой конструкции, которые в момент посадки разрушаются.
Энергетическое оборудование - 3960 солнечных элементов (89 вт), смонтированных на панели и две серебряно-цинковые батареи: основная (3800 вm-час ), подзаряжаемая солнечными элементами, и вспомогательная (800-1000 вт-час). Ориентацию панели на Солнце обеспечивает специальное устройство ASPP*
Радиооборудование - два приемника (один запасной), два передатчика (один запасной), две всенаправленные и одна остронаправленная антенны. Рабочая частота передатчиков 2295 Мгц. Скорость передачи 17,2; 137,5; 550; 1100 или 4400 двоичных единиц в сек.
Система ориентации и управления полетом - основной и вспомогательный солнечные датчики, датчик звезды Канопус, инерциальный блок, радиолокатор AMR** (установлен перед соплом тормозного РДТТ и после его включения отбрасывается струей газов), радиолокационный альтиметр, допплеровский радиолокатор, управляющие реактивные сопла системы ориентации (работают на сжатом азоте, установлены попарно на «ногах» шасси) и программно-временное устройство.
Панорамная телевизионная камера предназначена для получения изображений после посадки на Луну. Круговое горизонтальное сканирование обеспечивается поворотом головки камеры, вертикальное - подвижным зеркалом. Передача на Землю изображений с разверткой 200 строк ведется с помощью всенаправленной антенны, с разверткой 600 строк - остронаправленной антенны. Помимо панорамной на аппарате установлена подлетная камера, однако ее включение не планировалось.
Слежение за аппаратом осуществляли 4 станции в системе DSN*** (DSIF) «Пионер» и «Марс» в Голдстоне (шт. Калифорния), в Йоханнесбурге (ЮАР), в Тидбинбилла близ Канберры (Австралия). Информация от этих станций поступала в координационно-вычислительный Центр в Пасадене (шт. Калифорния).
* Antenna Solar Panel Positioner - установщик антенны и панели с солнечными элементами. ** Altitude Marking Radar - радиолокатор, регистрирующий высоту. *** Deep Spaсе Network - сеть (станций слежения) дальнего космоса.
Ракета-носитель «Атлас-Кентавр» (запуск АС-10****) с космическим аппаратом была запущена 30 мая в 14 час, 41 мин. 09 сек. Скорость аппарата в момент отделения от второй ступени составляла 10555 м/сек, Коррекция траектории была проведена 31 мая с помощью верньерных двигателей. За 34 мин. до расчетного времени включения тормозного РДТТ началась ориентация аппарата, ось РДТТ была совмещена с вектором скорости. РДТТ и верньерные ЖРД работали в соответствии с программой, вертикальная составляющая скорости к моменту посадки составляла 3-3,6 м/сек. Аппарат совершил посадку на Луне 2 июня в 6 час. 17 мин. 37 сек. в Океане Бурь в точке с координатами 2,49° ю. ш. и 43,32° з. д. После посади началась передача на Землю изображений сначала с разверткой 200 строк, затем, после ориентации (с помощью установщика ASPP) остронаправленной антенны на Землю, - с разверткой 600 строк. Передача велась со 2 до 8 июня ежедневно в те периоды (9-10 час.), когда аппарат находился в зоне видимости станции слежения «Пионер». Лунный терминатор прошел через место посадки аппарата 14 июня в 15 час. 39 мин. (начался ночной период), передача изображений прекратилась в 16 час. 18 мин. До этого момента на Земле было получено 10388 изображений, а на аппарат передано ~ 100000 команд. Последняя телеметрическая информация от аппарата была получена 16 июня в 20 час. 30 мин. После этого все оборудование аппарата было выключено за исключением двух приемников. Установить связь с аппаратом удалось 6 июля, а 14 июля она внезапно прекратилась, За это время было получено еще 849 изображений.
В конце июля все работы, связанные с аппаратом «Сервейер I», были официально прекращены. Однако, как сообщило агентство ЮПИ, 6 января 1967 г. с аппаратом был проведен 12-часовой сеанс связи.
* Первая ракета, предназначенная для доставки космического аппарата на Луну. О запусках экспериментальных ракет см. в разделе ИСЗ.
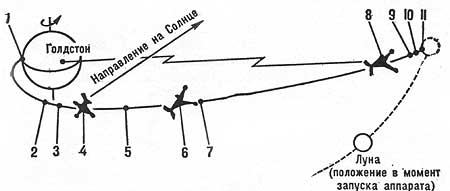
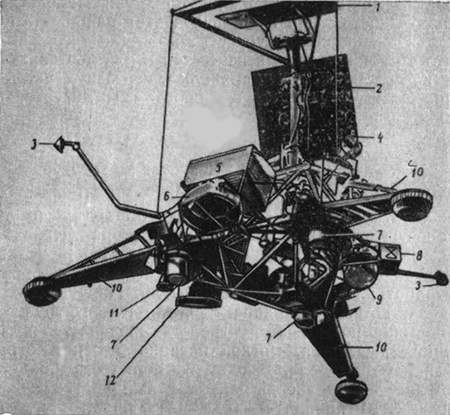
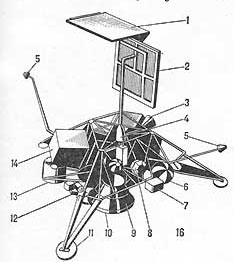 Космический аппарат «Сервейер I», 1 - панель с солнечными элементами; 2 - остронаправленная антенна; 3 - датчик звезды Канопус; 4 - панорамная телевизионная камера; 5 - всенаправленная антенна; 6 - баллон с гелием для подачи топлива в верньерные двигатели; 7 - вспомогательная батарея; 8 - баллон со сжатым азотом для управляющих реактивных сопел системы ориентации; 9 - тормозной РДТТ; 10 - антенна радиолокатора AMR; 11 - опора посадочного шасси; 12 - верньерный ЖРД; 13 - антенна допплеровского радиолокатора; 14 - контейнер с электронным оборудованием. |  Схема спуска АМС «Сервейер» 1 Ориентация. 2 Маневр за 30 мин до касания поверхности перед включением тормозного двигателя. 3 По данным радиовысотомера (который выбрасывается из сопла тормозного двигателя) включается тормозной двигатель. С высоты 83,7 км и при скорости 9500 км/ч аппарат стабилизируется управляющими двигателями. 4 Тормозной двигатель прекращает работу и отделяется; с высоты 11 700 м управление спуском обеспечивается управляющими тормозными двигателями. 5 Управляющие двигатели выключаются на рас стоянии 4,27 м от поверхности Луны при скорости 5,6 км/ч. 6 Космический аппарат совершает посадку со скоростью 12,8 км/ч на амортизирующие опоры. |
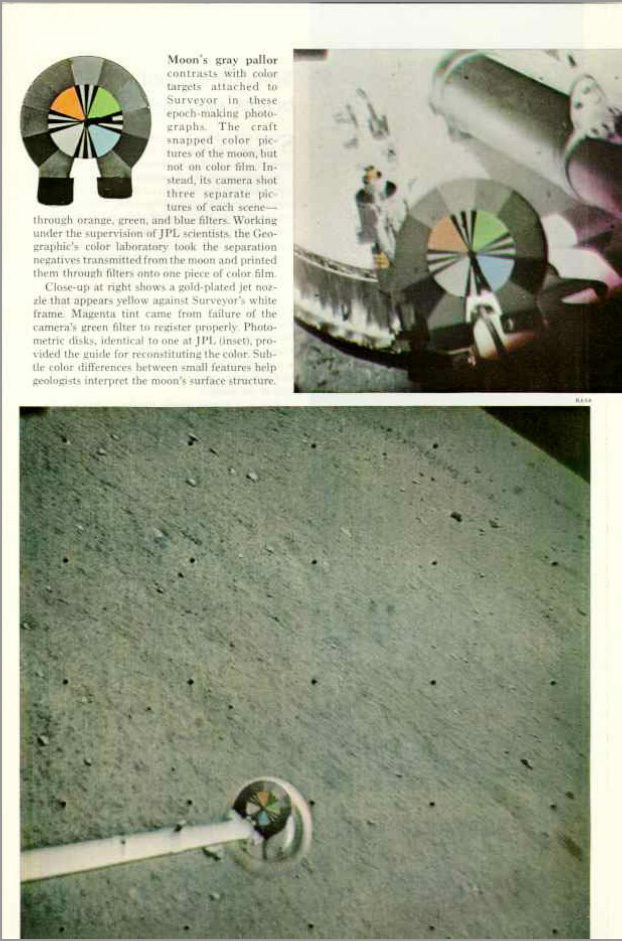
 Изображение лунной поверхности к юго-востоку от места посадки аппарата Surveyor I. Справа на переднем плане кусок породы высотой 15 см и 30 см длиной, вверху слева - небольшой кратер (белое пятно рядом с кратером - отражение солнечного блика внутри телекамеры). 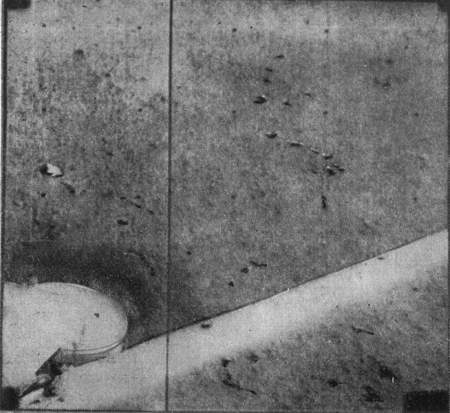 Изображение опоры одной из трех посадочных ног аппарата Surveyor I. Вокруг опоры углубление в грунте образовавшееся при посадке аппарата. Белая поперечная полоса - конструктивный элемент аппарата.  |
Программа Surveyor («Наблюдатель», «Топограф») явилась следующим этапом в изучении Луны за программой Ranger. Ею предусматривалось создание аппарата для мягкой посадки на Луну и проведения исследований лунной поверхности как в рамках программы Apollo, так и в научных целях. В 1960 г. по заданию NASA Лабораторией по изучению технических проблем межпланетных полетов совместно с Лабораторией космической техники, McDonnel Aircraft Corp., North American Aviation и Hughes Aircraft Co. были начаты работы по созданию космического аппарата для мягкой посадки и исследования лунной поверхности. Общее руководство этими работами, а затем и разработкой аппарата осуществлялось Лабораторией реактивного движения. Руководство работами по программе в целом осуществлялось Управлением научных и прикладных космических исследований NASA. Первоначально предполагалось, что в начале 1961 г. NASA выберет один из представленных фирмами-разработчиками проектов для дальнейшей проработки. Первые запуски аппаратов Surveyor ракетами-носителями Atlas - Centaur были запланированы на 1963- 1964 гг., всего в период 1963-1965 гг. предполагались запуски 7 аппаратов. Техническим заданием предусматривалось создать аппарат весом около 1000 кГ при весе научной аппаратуры 45 кГ. На поверхность Луны предполагалось доставить приборный контейнер весом около 360 кГ. Система посадки должна была обеспечить посадку аппарата со скоростью 4 м/сек.
В декабре 1960 г. Лаборатории реактивного движения вышеуказанными организациями были представлены проекты аппарата по программе Surveyor. После их рассмотрения руководство NASA выбрало для дальнейших проработок проект Hughes Aircraft Co., назначенной головной организацией по разработке и изготовлению аппаратов, получивших. название Surveyor. Контракт NASA с Hughes Aircraft Co. заключен в марте 1961 г. По проекту аппарат после отделения от ракеты-носителя имеет вес 1100 кГ, в т. ч.: конструкция, связное оборудование и система терморегулирования -230 кГ; научные приборы и телевизионное оборудование - 90-135 кГ; приборный контейнер, доставляемый на поверхность Луны, - 340 кГ. В качестве источника электроэнергии предусматривалось использование химических батарей, подзаряжаемых солнечными элементами. Одновременно прорабатывался вариант системы электропитания с применением термоэлектрического генератора с радиоактивным изотопом. Cm242 мощностью 30 вт. Программой полета аппарата предусматривалось проведение коррекции траектории с помощью верньерных двигателей - трех ЖРД с тягой, регулируемой в диапазоне от 13,6 до 48,5 кг, работающих на монометилгидразине и четырехокиси азота. Предполагалось применить вытеснительную подачу топлива и регенеративное охлаждение двигателей. Предварительный контракт Hughes. Aircraft Co. на разработку и изготовление двигателей заключен в 1961 г. с Thiokol Chemical Corp. Торможение аппарата на участке посадки на Луну предполагалось обеспечить бортовым РДТТ, стабилизацию и управление на всех участках полета - ЖРД и управляющими реактивными соплами.
Для изучения лунной поверхности на аппарате предусматривалось установить следующее научное оборудование.
Четыре телекамеры для получения изображений лунной поверхности и наблюдения за работой бортового оборудования. Камеры включаются до посадки аппарата на Луну, непосредственно после включения обозреваемая площадь поверхности составляет около 40 000 км2, а разрешающая способность - до 0,33 км. После посадки аппарата предполагалось объективы 3-х камер направить вверх, а объективы четвертой - вниз, для наблюдения за работой бурильной установки. При съемке на поверхности Луны 3 камеры, направленные объективами вверх, имеют круговой обзор в горизонтальной плоскости, обеспечиваемой системой зеркал, а четвертая - угол обзора в 65° в вертикальной плоскости. Камеры снабжены 3 сменными объективами: широкоугольным телеобъективом и объективом с высокой разрешающей способностью; при фокусировке оптической системы обеспечивается их разрешающая способность 4, 1 и 0,2 мм, соответственно. Предполагалось получить стереоскопические изображения лунной поверхности и провести фотометрические колориметрические и поляриметрические исследования.
Приборы для измерения температуры у поверхности Луны, которые в диапазоне 120-400°К при скорости изменения температуры до 3° К/мин, не должны иметь погрешность больше 1°К. Они располагаются на высоте 1,2 м от поверхности. Измерения температуры предполагалось производить несколько раз в течение лунного дня и ночи для определения скорости остывания поверхности.
Приборы для измерения скорости звука в лунных породах рассчитаны на измерение скорости от 100 до 7500 м/сек. Звуковые колебания предполагалось создавать зарядами взрывчатых веществ, подрываемых на некотором расстоянии от аппарата.
Акселерометры для изучения механических характеристик лунного грунта монтируются в «снаряды» конической и полусферической формы, сбрасываемые на поверхность с небольшой высоты; no показаниям акселерометров определяется скорость движения «снарядов» через поверхностный слой. Полученные данные предполагалось сравнивать с показаниями аналогичных «снарядов», сбрасываемых на различные почвы Земли.
Прибор для определения прочности лунного грунта. Это определение предполагалось проводить двумя пластинами различных размеров, вдавливаемыми в грунт, путем измерения скорости их углубления в зависимости от силы давления.
Буровая установка предназначалась для бурения и извлечения пробоотборником образцов лунного грунта из скважины диаметром 5 см и глубиной до 1,5 м. Образцы лунного грунта подвергаются химическому анализу на аппарате, результаты анализа передаются на Землю.
Зонд для изучения подпочвенного слоя предполагалось опустить в пробуренную бурильным устройством скважину, с измерениями на различной глубине через каждые 15 сек.
Сейсмометр для проведения сейсмических исследований на поверхности Луны регистрирует сдвиги грунта в 1 μ, при этом создается напряжение от 25 до 50 мв.
Оборудование для отбора проб лунного грунта предназначено для отбора, размельчения и подачи проб в рентгеновский дифрактометр для минералогического анализа.
Приборы для проведения анализа образцов лунных пород: рентгеновский спектрометр для определения по наведенному рентгеновскому излучению процентного содержания в образце Al, Fe, К, Са, Mg, Mn, Na, Ni, S, Ti, С, Cr, (pacсчитан на проведение анализа 20 образцов); рентгеновский-дифрактометр для облучения рентгеновскими лучами образца породы и регистрации наведенного γ -излучения счетчиком Гейгера - Мюллера (излучение сравнивается с наведенным γ-излучением известных минералов и делается вывод о наличии в лунных породах тех или иных минералов); газовый хроматограф для анализа проб газов и органических соединений в породах, слагающих лунную поверхность.
Приборы для измерения атмосферного давления и определения газового состава атмосферы, рассчитанные на измерение давления атмосферы в диапазоне 10-7-10-14 мм рт. ст. Магнитометр для обнаружения магнитного поля Луны. Телескоп с высокой разрешающей способностью. Прибор для изучения магнитных свойств лунных пород. Прибор для определения энергетического спектра космических частиц, достигающих поверхности Луны. Прибор для регистрации протонов c энергией Е > 10 Мэв, а-частиц с энергией Е > 40 Мэв и электронов с энергией Е >0,5 Мэв. Прибор (микрофон) для определения массы, скорости и направления полета частиц, выбиваемых из лунных пород метеорными телами. Регистрация этих частиц и их изучение необходимо для выяснения опасности для космонавтов на Луне, воздействия на объективы оптической аппаратуры, зеркала и солнечные элементы аппаратов, совершивших посадку на Луну. Контракт в размере 257,5 тыс. долл. на разработку и изготовление прибора NASA заключило с Научно-исследовательским центром космических полетов им. Маршалла.
Согласно предварительным проработкам стоимость создания аппарата Surveyor по этому проекту оценивалась в 50 млн. долл.
В ходе дальнейших работ выяснилось, что первые, а, возможно, и последующие образцы ракеты-носителя Atlas - Centaur, создававшейся в то время, не смогут вывести на траекторию полета к Луне аппарат весом 1100 кГ. В связи с этим проект аппарата был пересмотрен и вес уменьшен до 952 кГ при весе, доставляемом на поверхность Луны, 270 кГ. Этот аппарат получил обозначение Surveyor А. Впоследствии, модель аппарата Surveyor А весом 950-970 кГ получила наименование Block I, а модель весом 1130-1270 кГ- Block II.
В марте 1964 г. Лаборатория реактивного движения объявила конкурс на разработку тормозного РДТТ, а вскоре с Atlantic Research Corp. и Thiokol Chemical Corp. был заключен параллельный контракт. По условиям контракта Atlantic Research Corp. должна была провести испытания 2 двигателей, a Thiokol Chemical Corp. - одного. К апрелю 1965 г, Atlantic Research Corp. провела испытания первого двигателя, который при весе топливного заряда 450 кГ проработал 40 сек. При осмотре двигателя после испытаний существенной эрозии сопла не было обнаружено. К марту 1965г. Thiokol Chemical Corp. на базе ВВС Эдварде успешно проведены огневые испытания РДТТ, который проработал 35 сек. Топливо содержало 12% присадки бериллия. По результатам испытаний контракт Лаборатории реактивного движения на разработку и изготовление тормозных РДТТ для аппаратов Surveyor получила Thiokol Chemical Corp.
По контракту Hughes Aircraft Corp. верньерные ЖРД разрабатывались Reaction Motors, Div. (отделением Thiokol Chemical Corp.). Проектом предусматривалось регенеративное охлаждение и регулирование тяги в диапазоне от 29 до 100%. При отработке возникли трудности с обеспечением регенеративного охлаждения и разработкой системы регулирования тяги. В связи с задержкой работ Лаборатория реактивного движения заключила в 1963 г. параллельный контракт на разработку подобного двигателя с Лабораторией космической техники на сумму 345 тыс. долл. По контракту ЖРД должны иметь тягу 63,5 кГ и допускать регулирование тяги в диапазоне от 10 до 100%, обеспечиваемое форсунками с регулируемым проходным сечением. Возможность регулирования тяги в таком большом диапазоне должно было сделать двигатель Лаборатории космической техники более экономичным, чем двигатель Reaction Motors, Div. В гидроприводах управления двигателем предусматривалось использование одного из компонентов топлива, а не специальной гидравлической жидкости. Охлаждение предполагалось обеспечить за счет уноса разрушающегося покрытия. Огневые испытания двигателя должны были быть проведены до конца 1963 г. В ходе дальнейших работ (в конце 1963 г.) контракт Лаборатории реактивного движения с Лабораторией реактивной техники был продолжен на сумму 645 тыс. долл. Предусматривалось, в частности, увеличение тяги до 82 кГ и обеспечение регулирования ее в диапазоне от 9 до 82 кГ. В течение 1963 г. Лабораторией реактивной техники проводились огневые испытания двигателя, в ходе которых он трижды включался и проработал в общей сложности 330 сек. По результатам работ Лаборатории реактивной техники NASA в 1964 г. предполагало разорвать контракт с Reaction Motors, Div., несмотря на то, что ею к 1963 г. было израсходовано на разработку двигателя около 8 млн. долл. Однако, в ходе дальнейших испытаний Reaction Motors, Div., удалось устранить недостатки, и NASA приняло решение использовать этот двигатель для установки на аппарате Surveyor А модели Block I, а для более тяжелой модели Block II использовать двигатель Reaction Motors, Div. или Лаборатории реактивной техники.
Прорабатывались варианты системы энергопитания, использующей радиоизотопные источники. Martin Co. проводила работы по созданию радиоизотопного термоэлектрического генератора весом 13 кГ и мощностью 26 вт. Установка получила название SNAP-11 (Space Nuclear Auxiliary Power - вспомогательный ядерный источник для космических аппаратов). Экспериментальный вариант SNAP-11 был передан Лаборатории реактивного движения; в нем для нагрева рабочего тела использовался не изотоп, а электрический нагреватель. Первую установку с радиоизотопом фирма должна была передать Лаборатории реактивного движения в феврале 1966 г. Общая стоимость разработки SNAP-11, по предварительным оценкам, равнялась 1,5 млн. долл. Первоначальными планами NASA предполагалось установить SNAP-11 на аппарате Surveyor А модели Block I, однако в дальнейшем было принято решение использовать в системе электропитания аппаратов Surveyor А химические батареи и солнечные элементы. Комиссией по атомной энергии (Atomic Energy Commission - АEС) были заключены параллельные контракты с General Electric Co. и RCA на сумму 64,5 тыс. долл. и 69 тыс. долл., соответственно, предусматривавшие изучение возможности создания радиоизотопной энергетической установки на Ри238 для аппарата Surveyor модели Block II. Контрактами предусматривалось создание установки весом не более 13,6 кГ, длиной 61 см, диаметром 25 см, обеспечивающей мощность 45-50 вт при напряжении 28 в и продолжительности работы 1 год. В 1965 г. в связи с отказом NASA от разработки аппарата Surveyor А модели Block II эти работы были прекращены.
Для запусков аппаратов Surveyor была разработана типовая программа полета. Ниже приводится вариант с выводом на промежуточную орбиту. После окончания работы двигателей I ступени ракеты-носителя и ее отделения включаются двигатели II ступени, которые выводят ступень с аппаратом на промежуточную круговую орбиту высотой 160 км, по которой она обращается 25 мин., затем производится повторное включение двигателей II ступени и ступень с аппаратом переходит на траекторию полета к Луне. По команде станции слежения в Крюгерсдорпе после окончания работы двигателей, аппарат отделяется от ступени, развертываются посадочная тренога и всенаправленная антенна и производится ориентация аппарата относительно Солнца и Канопуса. Солнечный датчик, по которому аппарат ориентируется на Солнце, выдает сигналы на электромотор, поворачивающий панели с солнечными элементами на Солнце. Через 15-20 час. после запуска, когда аппарат находится в поле зрения станции слежения в Голдстоуне, проводится коррекция траектории верньерными ЖРД (предусмотрено проведение нескольких коррекций), затем аппарат снова ориентируется по Солнцу и Канопусу. На 3 сутки полета (на расстоянии 1600 км от Луны) начинается цикл операций, обеспечивающий посадку аппарата.
I этап. Расстояние аппарата до Луны - от 1600 до 84 км, скорость аппарата относительно Луны - от 2500 до 2620 м/сек. Реактивными управляющими соплами аппарат ориентируется так, чтобы его продольная ось, по которой размещен тормозной РДТТ, совместилась с вектором скорости. На расстоянии 250 км от Луны по команде с Земли включается радиолокатор AMR, измеряющий расстояние до Луны. Далее все операции осуществляются автоматически. На расстоянии 95 км от Луны AMR подает команду на программно-временное устройство (ПВУ), по команде которого через определенные промежутки времени (временные уставки закладываются на борт по командам с Земли) включается ЖРД (обеспечивают ориентацию аппарата во время работы РДТТ и торможение аппарата после выключения РДТТ), РДТТ (обеспечивает гашение скорости), радиовысотометр и доплеровский датчик скорости. В случае неудачно проведенной коррекции траектории на этом этапе посадки предусмотрено включение «подлетной» телекамеры.
II этап. Расстояние аппарата от Луны - от 84 до 12 км; скорость аппарата относительно Луны - от 2620 до 119±38 м/сек. На высоте 84 км последовательно включаются ЖРД и РДТТ. AMR устанавливается перед соплом РДТТ и после включения РДТТ отбрасывается истекающей струёй газов (с этого момента работа ЖРД и РДТТ осуществляется по командам от ПВУ).
III этап. Расстояние аппарата от поверхности Луны - от 12 км до 12 м; скорость аппарата относительно Луны - от 119±38 м/сек до 1,5 м/сек. РДТТ работает 40 сек, снижая скорость падения до 15-12 м/сек, и прекращает работу на высоте 10 км. По достижении фиксированной скорости снижения на расстоянии 8 км от поверхности Луны РДТТ сбрасывается по команде ПВУ от сигнала инерционного выключателя. Дальнейшее торможение и ориентация аппарата обеспечивается непрерывно работающими ЖРД. Работа ЖРД в этот период вначале обеспечивается по командам от ПВУ, а затем, после того, как радиолокационный альтиметр и допплеровский радиолокатор (RADVS) начинают получать устойчивые отраженные сигналы от поверхности Луны, по командам от этих устройств. Расстояние до Луны в этот момент 4 км, а скорость - 0,1 км/сек.
IV этап. Расстояние аппарата от поверхности Луны - от 12 до 4 м; скорость аппарата относительно Луны постоянна - 1,5 м/сек. Спуск аппарата с постоянной скоростью обеспечивается работой ЖРД, которые на расстоянии 4,2 м до поверхности Луны выключаются.
V этап. Расстояние аппарата до поверхности Луны - от 4 до 0 м; скорость аппарата относительно Луны - от 1,5 до 5 м/сек. В течение 2 сек, аппарат совершает свободное падение. Расчетная скорость посадки аппарата в момент удара о поверхность не должна превышать 4 м/сек, а отклонение продольной оси аппарата от вертикали - не более 5°. В момент посадки перегрузки не должны быть более 20, хотя бортовое оборудование проектировалось на перегрузки до 100. Время полета аппарата от старта до момента посадки - около 66 час.
Для наземных испытаний и отработки бортовых систем Hughes Aircraft Co. создала натурный макет, модель и экспериментальный образец аппарата Surveyor А. Натурный макет предназначался для определения способности аппарата совершать посадку на горизонтальную и наклонную поверхности разной структуры. Для имитации веса аппарата к каркасу макета прикреплялись стальные пластины, а для имитации лунного тяготения использовались противовесы, компенсировавшие 5/6 веса. Падение макета на поверхность, имитирующую скалистую или пылевую структуру грунта, осуществлялось при различных значениях вертикальной и горизонтальной составляющих вектора скорости. Для имитации пылевой поверхности применялись древесные стружки и тальк, для определения устойчивости макета поверхность, имитирующая лунный грунт, устанавливалась под различными углами (до 25°) к горизонту, для имитации свободного падения после выключения верньерных двигателей макет сбрасывался с высоты 4,5 м. Поверхность, на которую сбрасывался макет, имела наклон для того, чтобы 2 опоры находились выше третьей и вся нагрузка приходилась на третью ногу. Макет при этих испытаниях не опрокидывался.
Модель аппарата предназначалась для испытания системы, обеспечивающей посадку на Луну, в том числе системы наведения и управления, и снабжалась верньерными двигателями, радиолокаторами, аппаратурой инерциальной системы и соответствующим электронным оборудованием. Испытания проводились с 1964 г. на базе ВВС Холломан (шт. Нью-Мексико), на полигоне White Sands Proving Ground (Ракетный испытательный полигон Уайт Сэндс). Программой испытаний предполагалось провести сбрасывания модели, поднятой на воздушном шаре или аэростате на высоту 300-500 м. Модель снабжалась небольшим парашютом, обеспечивающим ее стабилизацию при падении. При достижении скорости падения 24,5 к/сек предполагалось включить систему ориентации, а затем верньерные двигатели, которые должны снизить скорость падения до 1,5-3,0 м/сек. Во время падения модели до высоты 150-180 м система управления и наведения должна работать в том режиме, который необходим для обеспечения посадки аппарата на Луну. На высоте 150-180 м предполагалось раскрыть большой парашют для смягчения удара при посадке. Намечалось провести 8 таких испытаний. При дальнейших испытаниях, когда модель не оснащается парашютом и скорость составит около 6 м/сек, для смягчения удара при посадке предполагалось применить пневматические амортизаторы. Предполагалось провести дополнительно 2 испытания, при которых не будет использоваться посадочный парашют, а модель аппарата совершит посадку с помощью верньерных двигателей, работающих по командам системы наведения и управления. Модель аппарата, предназначавшаяся для испытаний системы управления верньерными двигателями, получила обозначение Т-2. В 1964 г. на полигоне Уайт Сэндс проведены 2 испытания этой системы, при которых модель аппарата сбрасывалась с аэростата. Они были неудачными из-за некачественного изготовления моделей и плохой подготовки испытаний Hughes Aircraft Co. Испытания этой системы продолжены в 1965 г. В ноябре 1965 г. проведены первые успешные летные испытания элементов системы, обеспечивающих мягкую посадку на Луну. Для этих испытаний модель аппарата подвешивалась к аэростату, который поднимался на высоту 420 м. После подъема аэростата были включены бортовой допплеровский радиолокатор, установленный на модели, и другое оборудование системы управления и 3 верньерных двигателя. Затем модель отделилась от аэростата и на высоте 150 м был раскрыт парашют, обеспечивший её посадку. После проведения этих испытаний высказывались опасения, что радиолокационные устройства, устанавливаемые на аппарате, не смогут правильно измерять расстояние до поверхности Луны потому, что по некоторым данным лунная поверхность может иметь сравнительно толстый слой радиопрозрачного материала и излучение радиолокатора будет отражаться не от поверхности Луны, а от твердых пород, залегающих на некоторой глубине. Испытания радиолокатора и допплеровского датчика скорости проводились с использованием вертолета. Радиолокатор и датчик скорости работали во время спуска вертолета с высоты 1800 м до 6 м. Первые испытания посадочной системы (без тормозного РДТТ) начались в ноябре 1965 г. Вес модели, предназначенной для этих испытаний, составлял около 100 кг. При первых испытаниях в ноябре 1965 г. и феврале 1966 г. модель сбрасывалась с высоты 420 м, на высоте 150 м выключались работавшие до этого момента верньерные двигатели и развертывался посадочный парашют. В мае 1966 г. продолжены испытания посадочной системы; модель весом 102 кГ была сброшена с высоты 300 м, при достижении скорости 16,8 м/сек были включены верньерные двигатели, которые снизили ее до 1,5 м/сек. Спуск продолжался в течение 36 сек. и впервые был осуществлен без применения парашютов. Программой проведения наземных испытаний предполагалось экспериментальный образец аппарата доставить на станцию слежения системы DSIF в Голдстоуне и провести испытания бортового оборудования, которое работает по сигналам этой станции. Дальнейшими испытаниями на базе Холломан предусматривалось изучение возможности затухания сигналов бортовых радиолокаторов при прохождении их сквозь факел верньерных двигателей. Испытание носового обтекателя, прикрывающего аппарат Surveyor А во время прохождения ракеты-носителя через плотные слои атмосферы, проводились на стенде комплекса CSTS Astronautics.
В качестве первой ступени ракеты-носителя Atlas-Centaur использовалась ранее созданная ракета Atlas, а второй ступенью должна была служить ракета Centaur, разрабатывавшаяся под руководством Научно-исследовательского центра космических полетов им. Маршалла. Все запуски ракет-носителей Atlas-Centaur по программе Surveyor осуществлялись со стартовых комплексов №№ 36А и 36В м. Кеннеди, созданных специально для этой программы. Отработка экспериментальных образцов ракеты-носителя Atlas-Centaur началась в 1962 г. Первый запуск (АС-1) экспериментальной ракеты-носителя Atlas-Centaur произведен 8 мая 1963 г. После неудачного запуска АС-1 решением NASA руководство работами по ракете Centaur было возложено на Научно-исследовательский центр им. Льюиса ввиду того, что Центр Маршалла был в основном занят разработкой ракеты-носителя Saturn. В связи с важностью программы Surveyor в 1963 г. решением правительства работы по ракете-носителю Atlas-Centaur были отнесены к категории «самых первоочередных работ». Для обнаружения возможных неисправностей систем ракеты-носителя NASA и Центром Льюиса было принято решение проводить до старта полную комплексную проверку ракеты-носителя на специальном стенде Astronautics в г. Сан-Диего. После запуска АС-1 в конструкцию ракеты-носителя были внесены существенные усовершенствования и проведены длительные, продолжительностью 14 месяцев, наземные испытания отдельных узлов и ракеты-носителя в целом. Запуски экспериментальной ракеты-носителя Atlas-Centaur AC-2 и АС-3 состоялись, соответственно, 27 ноября 1963 г. и 30 июля 1964 г. Программой запусков предусматривалось проведение испытаний стартового комплекса, бортовых систем и ракеты-носителя в целом. Запуск экспериментальной ракеты-носителя Atlas-Centaur АС-4 состоялся 11 декабря 1964 г. Программой испытаний предусматривались те же задачи, что и при запуске АС-3, а также ряд дополнительных испытаний бортовых систем, в частности, повторного включения двигательной установки II ступени и системы, с помощью которой совершается пространственный маневр II ступени. Полезной нагрузкой являлся макет аппарата Surveyor, который имитировал его весовые и вибрационные характеристики. В полете не была осуществлена ориентация и стабилизация II ступени, повторное включение двигательной установки осуществить не удалось.
Параллельно с разработкой аппарата Surveyor А в 1961- 1962 гг. проводились работы по созданию аппарата Surveyor В для вывода на селеноцентрическую орбиту и получения снимков лунной поверхности. В связи с недостатком средств разработка аппарата Surveyor В в 1963 г. была прекращена и аппараты Surveyor А моделей Block I и Block II стали называться Surveyor. Первоначально NASA планировало начиная с 1963 г. по 1966 г. осуществить запуск 17 аппаратов Surveyor: 7 экспериментальных аппаратов модели Block 1 и 10 отработанных аппаратов модели Block II. Планами NASA предусматривалось в период МГСС (1964-1965 гг.) осуществить запуск 2 аппаратов Surveyor. Расходы на разработку всех этих аппаратов, изготовление и запуски должны были составить около 620 млн. долл. В начале 1964 г. срок запуска первого экспериментального аппарата Surveyor модели Block I был перенесен на II квартал 1965 г. Этот аппарат предназначался для проведения испытания бортовых систем. Три последующих аппарата, предназначавшихся для изучения Луны, предполагалось запустить с 3-месячными интервалами. Первые телевизионные изображения лунной поверхности планировалось получить при запуске 5-го аппарата в середине 1966 г. Против этого плана возражали конструкторы, проектировавшие лунную кабину аппарата Apollo, для которых получение изображений и характеристик лунной поверхности позволило бы на ранней стадии проектирования лунной кабины учесть реальные условия при посадке. Поэтому было выдвинуто предложение о получении изображений при запусках первых четырех аппаратов. Были изменены и сроки запуска отработанных аппаратов Surveyor модели Block II (эту модель предполагали оснастить самоходным устройством, а запуски ее начать с 1967 г.). В связи с сокращением Конгрессом в середине 1964 г. бюджетных ассигнований NASA на 1965 финансовый год руководство NASA пересмотрело программу запусков аппаратов Surveyor. Новой программой предусматривалось сокращение числа запусков отработанных аппаратов модели Block I с 7 до 5. Первые 3 аппарата предназначались для испытания бортовых систем, обеспечивающих мягкую посадку. Их предполагалось оснастить телекамерой для получения изображений лунной поверхности в период посадки аппарата, научную аппаратуру устанавливать не предполагалось.
После запуска АС-4 в январе 1965 г. был вновь уточнен план дальнейших запусков: для отработки ракеты-носителя Atlas-Centaur предполагалось осуществить 4 запуска (AC-5--АС-8), отработку бортовых систем экспериментального аппарата Surveyor модели Block I - при 3 запусках (AC-9-AC-11), доставку на Луну отработанных аппаратов Surveyor модели Block II начать с запуска АС-12, но не ранее, чем в 1966 г. К началу 1965 г. ассигнования, потребные на реализацию программы Surveyor, стали оцениваться в размере 760 млн. долл., причем уже было израсходовано около 531 млн. долл.. Однако этот план был скорректирован и утверждена новая программа запусков. В марте 1965 г. предполагалось осуществить запуск АС-5 с макетом аппарата в качестве полезной нагрузки и продолжить отработку бортовых систем ракеты-носителя. В июне 1965 г. планировалось. осуществить запуск АС-6 с теми же задачами, что и при запуске АС-5, и закончить этап обработки ракеты-носителя Atlas-Centaur. В сентябре-октябре 1965 г. предусматривалось. осуществить запуск АС-7 м доставить на Луну первый экспериментальный аппарат Surveyor модели Block I для получения телевизионных изображений лунной поверхности и отработки системы, обеспечивающей мягкую посадку аппарата.
К августу 1965 г. были завершены виброиспытания экспериментального аппарата Surveyor и начались испытания в барокамере. В ходе испытаний ошибочно было использовано напряжение, превышающее допустимое, и ряд транзисторов и диодов был поврежден, что задержало окончание испытаний. Необходимость в проведения дополнительных испытаний заставила отложить запуск АС-7 на декабрь 1965 г. Запуск АС-5 произведен 2 марта 1965 г. В результате самопроизвольного прекращения работы двигателей I ступени ракета-носитель взорвалась через 2 секунды после включения двигателей и был поврежден пусковой стол стартового комплекса № 36А. Полезной нагрузкой являлся динамический макет аппарата Surveyor. После ряда неудачных запусков ракеты-носителя Atlas - Centaur Комитет Палаты Представителей по научным вопросам и астронавтике рекомендовал в 1965 г. руководству NASA рассмотреть возможность использования для запусков аппаратов Surveyor ракету-носитель Titan IIIC. В связи с отставанием отработки ракеты-носителя Atlas-Centaur Конгресс включил в бюджет NASA на 1965 ф. г. ассигнования в размере 10 млн. долл. на приспособление ракеты-носителя Titan IIIC для запусков аппаратов Surveyor. В июле 1965 г. из-за сокращений бюджетных ассигнований руководство NASA рассмотрело вопрос о создании отработанного аппарата Surveyor модели Block II, оснащенного самоходным устройством, и приняло решение прекратить эти работы. Запуск АС-6 произведен 11 августа 1965 г. со стартового комплекса № 36В. Полезной нагрузкой являлась динамическая модель аппарата Surveyor. Задачи запуска были выполнены. По результатам запусков АС-1-АС-6 руководством NASA ракета-носитель Atlas-Сеntaur признана отработанной. Однако для отработки бортовых систем впоследствии произведено еще 2 запуска (АС-8 и АС-9).
В конце 1965 г. была уточнена программа запусков аппаратов Surveyor. Предполагалось осуществить запуск 10 экспериментальных аппаратов модели Block I и отработанных аппаратов модели Block II, которые получили название Surveyor A, Surveyor В, . .., Surveyor I и Surveyor J, запускам этих аппаратов было присвоено обозначение «SC» (Surveyor-Centaur), SC-1 до SC-10. Запуск SC-1 первого экспериментального аппарата Surveyor А согласно этой программе был намечен на февраль 1966 г., но ввиду отставания проведения наземных испытаний аппарата Surveyor А запуск был перенесен на май 1966 г. Всего предполагалось провести 7 испытаний, в частности, испытания в термобарокамере, причем некоторые испытания - в течение 66 час. Экспериментальные аппараты Surveoyr А, В, С и D модели Block I должны были иметь вес не более 1020 кГ. Программой предусматривалось получить телевизионные изображения поверхности Луны и провести отработку бортовых систем аппарата. Установка научных приборов на этих аппаратах не предусматривалась. С 1967 г. уточненной программой предусматривалось начать запуск аппаратов Surveyor E, F и G модели Block II весом по 1020 кГ, в том числе научных приборов - 52 кГ. Предполагалось провести изучение Луны и получить. детальные телевизионные изображения лунной поверхности. На каждом из аппаратов предполагалось установить: 3 телевизионные камеры для получения изображений лунной поверхности, причем объектив одной из камер предполагалось, направить вертикально вниз, а две другие использовать для направленной съемки с использованием системы зеркал; блок приборов для исследования динамики посадки аппарата, включающий 9 тензометров, 3 линейных акселерометра, 3 скоростных гироскопа, 6 индикаторов соприкосновения с поверхностью, 3 индикатора положения амортизирующих опор на посадочных ногах аппарата, с их помощью предполагалось определить ускорения, скорости, смещение осей аппарата при ударе о поверхность, прочность и сопротивление грунта на сдвиг, глубину проникновения аппарата в грунт; устройство для изучения механических свойств лунного грунта. Устанавливаемый акустический детектор метеорных частиц и частиц лунного грунта, выбиваемых метеорными телами, позволяет регистрировать частицы с импульсом до 10-5 дин/сек. Предусматривалось измерить число, массу, скорость частиц и определять траекторию их полета. С помощью устройства для анализа проб лунного грунта по рассеянному α-излучению, создаваемому радиоактивным источником, входящим в него предполагалось обеспечить идентификацию химических элементов с атомным номером более 5. Устанавливаемый сейсмометр предназначен для регистрации сейсмической обстановки на Луне (определение числа, мощности и пространственного распределения естественных сейсмических колебаний). Сейсмометр регистрирует колебания поверхности с частотой от 0,05 до 10 гц и вертикальное смещение до 10-3 мк при частоте 1 гц и позволяет регистрировать падение метеорных частиц в районе радиусом 160 км от места посадки аппарата.
После завершения запусков этой серии предполагалось осуществить запуски аппаратов Surveyor Н, I и J модели Block II весом по 1110 кГ для продолжения изучения лунной поверхности. В начале 1966 г. произошло новое изменение программы Surveyor из-за сокращения бюджета NASA на 1966 ф. г. По новой программе был сокращен объем исследований, предполагавшихся осуществить с помощью аппаратов Surveyor E, F, G модели Block II, что повлекло за собой уменьшение числа приборов, устанавливаемых на этих аппаратах: вместо 3 телевизионных камер и 5 комплектов научного оборудования на каждом аппарате предполагалось установить 1 камеру и один неполный комплект научного оборудования (блок приборов для исследования динамики посадки аппарата). Такое изменение программы не позволило разрабатывать аппараты Surveyor А модели Block II весом 1020 кГ. Запуски 4 экспериментальных аппаратов Surveyor А, В, С, D модели Block I, согласно измененной программе, должны были быть закончены до конца 1967 г., а отработанных аппаратов Surveyor Н, I и J модели Block II весом 1110-1130 кГ - начаться во второй половине 1968 г. На отработанных аппаратах предполагалось установить 3 телекамеры (2 для получения панорамных изображений и одна, с объективом, направленным вниз, для получения детальных снимков) и научные приборы. Несмотря на сокращение объема исследований американские ученые предполагали с помощью экспериментальных аппаратов Surveyor получить необходимые данные о лунном грунте. Датчики напряжения, устанавливаемые на опорах шасси, могут дать некоторые сведения о прочности грунта. Панорамная телекамера может дать сведения о рельефе. Если в поле зрения камеры попадает опора шасси, то по степени ее погружения в грунт можно судить о его прочности. Разрешающая способность камеры при съемке объектов, находящихся на переднем плане, достаточна для того, чтобы отличить лавовые породы от сцементированной или несцементированной пыли, колориметрические исследования могут быть проведены с помощью сменных цветных светофильтров. Радиолокационные устройства, используемые в системе посадки, могут дать сведения об отражательной способности грунта и о глубине залегания слоя, отражающего радиолокационное излучение. При помощи температурных датчиков можно получить сведения о температурных условиях на поверхности Луны.
В дальнейшем осуществление программы Surveyor проходило по несколько измененному плану. 7 апреля 1966 г. произведен запуск седьмой экспериментальной ракеты-носителя Atlas-Centaur, получившей обозначение АС-8. По первоначальным планам седьмую ракету-носитель предполагалось использовать для доставки первого экспериментального аппарата Surveyor на Луну, но позже было принято решение использовать ее для вывода макета аппарата Surveyor на геоцентрическую орбиту.
При проведении наземных испытаний аппарата Surveyor А были обнаружены неисправности, часть из которых устранена в ходе подготовки к запуску, устранение некоторых из них повлекло за собой изменение состава бортового оборудования и программы полета. В частности, электромоторы и привод устройства ASPP (Antenna/Solar Pannel Positioner - устройство для установки антенны и панели с солнечными элементами), обеспечивающего ориентацию панели с солнечными элементами на Солнце, а направленной антенны - на Землю, не работали при температуре ниже-100° С; согласно расчетам, в полете это устройство будет охлаждаться до температуры -106° С. Было принято решение не проводить его модификацию, а изменить программу полета при запуске SC-1: не использовать направленную антенну до посадки аппарата, зафиксировать ее параллельно мачте, на которой она монтируется (это необходимо для предотвращения смещения центра тяжести аппарата, что важно в момент посадки), а устройство ASPP, пока оно не охладится, включить сразу после отделения аппарата от ракеты-носителя для установки панели с солнечными элементами перпендикулярно продольной оси аппарата; после завершения этой операции устройство выключается. Для последующих аппаратов Surveyor было разработано устройство ASPP, работавшее при температуре -143° С. Другой неисправностью было то, что при низкой температуре электродвигатель, поворачивающий зеркало «подлетной» телекамеры, срабатывал только после многократного повторения команд. Вначале было принято решение не устанавливать на аппарате Surveyor «подлетную» камеру. Это решение мотивировалось тем, что для ее нормальной работы направленная антенна должна быть обращена к Земле, а уверенности в том, что это удастся сделать не было, а также тем, что передача телевизионных изображений, полученных ею, заставит делать перерывы в передаче телеметрической информации на участке подлета и посадки. Однако, все же было решено установить на этом аппарате «подлетную» камеру, но включение ее предусматривалось только в том случае, если аппарат вследствие неудачной коррекции пройдет мимо Луны. Испытания обнаружили также, что при работе верньерных ЖРД возникает вибрация, которая может помешать нормальной работе радиолокационных устройств в системе, обеспечивающей посадку аппарата. Высказывались также опасения, что могут возникнуть трудности с получением информации от блока приборов для исследования посадки аппарата. Передача этой информации производится в момент посадки, когда шумы и вибрации могут ослабить сигнал бортового передатчика. Для преодоления этого предполагалось. принять меры по своевременному вводу в эксплуатацию антенны с отражателем диаметром 64 м на станции слежения системы DSIF в Голдстоуне.
После успешного запуска SC-1 программа Surveyor вновь была уточнена и принято решение сократить число запусков экспериментальных аппаратов, а научные приборы устанавливать такие же, как на аппарате Surveyor E (запуск SC-5), а не как на аппарате Surveyor Н (запуск SC-8). 26 октября 1966 г. произведен последний запуск (АС-9) экспериментальной ракеты-носителя Atlas-Centaur. Полезной нагрузкой был весовой макет аппарата Surveyor.
В конце 1966 г. NASA приняло решение отказаться от создания 3 отработанных аппаратов Surveyor модели Block II (Surveyor Н, I и J) для изучения потенциальных мест посадки лунной кабины аппарата Apollo, мотивированное тем, что они не могут быть созданы достаточно быстро, чтобы обеспечить получение необходимых данных, которые можно было бы использовать при проектировании лунной кабины. Кроме того, изучение потенциальных мест посадки лунной кабины возможно провести в достаточном объеме 5 экспериментальными аппаратами Surveyor С-Surveyor G. Сокращение числа запусков позволило сократить расходы на программу примерно на 100 млн. долл.
Запуск SC-3 экспериментального аппарата Surveyor С был задержан примерно на 2 месяца из-за того, что при наземных испытаниях был обнаружен ряд неполадок в бортовых системах, в результате чего аппарат был демонтирован, а неисправные системы отправлены для устранения обнаруженных дефектов фирмам-изготовителям. После успешного запуска аппарата и получения данных о характеристиках лунной поверхности американскими учеными было высказано мнение, что оставшиеся 4 аппарата Surveyor D-Surveyor G целесообразно использовать не для изучения сравнительно ровных районов Луны, с точки зрения определения возможности посадки лунной кабины, а для изучения весьма пересеченных и интересных в научном отношении районов. Аппарат Surveyor D целесообразно было бы использовать для посадки в районе Центрального залива, где аппаратами Lunar Orbiter были обнаружены пересеченные участки местности. Первоначально в этот район предполагали доставить аппарат Surveyor С, но после того, как стало ясно, что этот район весьма пересечен и для доставки лунной кабины не приемлем, его направили в восточную часть Океана Бурь.
Основная цель запуска - доставка аппарата Surveyor на Луну с осуществлением мягкой посадки, получение телевизионных изображений лунной поверхности в районе посадки и отработка систем аппарата. При этом запуске продолжалась отработка систем ракеты-носителя. При запуске решались задачи по изучению характеристик лунного грунта по погружению опор посадочного устройства; по испытаниям систем коррекции траектории, мягкой посадки, связи и отработки систем ракеты-носителя. В одну из полых трубок каркаса был помещен американский национальный флаг.
Запуск SC-1 аппарата (рис. 14) произведен 30 мая 1966 г. в 14 час. 41 мин. 09 сек. (расчетное время - 14 час. 41 мин.), со стартового комплекса № 36А м. Кеннеди ракетой-носителем Atlas-Centaur AC-10. Азимут запуска - 102,3°. «Окном» для запуска 30 мая было время с 14 час. 39 мин. до 15 час. 27 мин. Комплекс № 36А восстановлен после разрушения в результате взрыва ракеты-носителя при запуске АС-5 2 марта 1965 г., затраты на восстановление комплекса составили около 2 млн. долл. Полет ракеты-носителя и аппарата проходил по программе близкой к расчетной. Вывод аппарата на траекторию полета к Луне производился по программе, несколько отличной от штатной: не предусматривался повторный запуск двигателей II ступени, а аппарат выводился непосредственно на траекторию полета к Луне. Ниже приведена программа полета при запуске от момента выключения основных двигателей II ступени (в скобках указано расчетное время): Т-момент старта; Т+11 мин. 55 сек. - развертывание посадочного шасси аппарата; Т+12 мин. 05 сек.-подача команд на развертывание стержней, несущих всенаправленные антенны (один из стержней не развернулся), и переключение передатчиков на работу при полной мощности (10 вт вместо 0,1 вт); T +12 мин. 31,1 сек. (12 мин. 31 сек.) - отделение аппарата от II ступени. После выхода аппарата Surveyor А на траекторию полета к Луне он получил название Surveyor I, а по международной системе - обозначение 1966-45А. После того как II ступень совершила разворот на 180°, была осуществлена подача в основные двигатели II ступени компонентов топлива, которые, истекая из сопел без воспламенения создают некоторую тягу; торможение ступени обеспечивается РДТТ, установленными на ней. Через 5 час. после запуска ступень отдаляется от аппарата на расстояние не менее-300 км. После этого маневра II ступень переходит на геоцентрическую орбиту с апогеем 400 000 км, наклонением. 33,6° и периодом обращения 11 сут.
Т+ (21 мин. 30 сек.) - начало цикла операций по командам ПВУ (успокоение аппарата, поиск Солнца, ориентация продольной оси аппарата на Солнце, ориентация панели с солнечными элементами на Солнце). Развертывание панели и поиск Солнца могут осуществляться и по командам с Земли; Т+ (32 мин.) - Т+(60 мин.) - установление связи с аппаратом станцией слежения в Иоганнесбурге; Т+1 час. 21 мин. - завершение ориентации на Солнце панели с солнечными элементами; Т+4 час 29 мин (6 час) - захват датчиком звезды Канопус. Поиск Канопуса может осуществляться 2 способами; по первому способу аппарат вращается со скоростью 0,5 град/сек, при захвате какой-либо звезды на Землю поступает сигнал о ее яркости и осуществляется сверка с эталоном; другой способ предусматривает вращение аппарата на 360°, регистрацию всех звезд, яркость которых находится в диапазоне чувствительности датчика и сравнение полученной карты неба с контрольной.
Без коррекции траектории аппарат достиг бы поверхности Луны в точке, находящейся в 400 км к юго-западу от расчетной точки (3,25° ю. ш. и 43,83° з. д.). Потребная величина корректирующей скорости для компенсации промаха и обеспечения требуемой продолжительности полета составляла 6,4 м/сек, а только для компенсации промаха - 3,8 м/сек. 31 мая была проведена коррекция траектории. В период её проведения аппарат находился на расстоянии 156 000 км. от Земли и был в зоне видимости станции слежения в Голдстоуне. Двигатели были включены в 6 час. 45 мин. и проработали 20,75 сек (расчетная продолжительность 20,65 сек), обеспечив приращение скорости 20,3 м/сек. Коррекция проведена с таким расчетом, чтобы аппарат опустился в 32 км от первоначально намеченной точки. Новая расчетная точка посадки имела селенографические координаты 2,3° ю. ш. и. 43,85° з. д. 31 мая в 7 час 03 мин аппарат вновь был ориентирован по Солнцу и Канопусу. Операции, обеспечивающие посадку на Луну, начались на 34 мин. до расчетного времени включения тормозного РДТТ. Аппарат совершил разворот по крену на 89,3°, затем по рысканию на 59,92° и снова по крену на 94,2°, в результате чего продолвная ось аппарата была совмещена с вектором скорости. Маневры завершились за 29 мин. до расчетного времени включения РДТТ. При посадке аппарата РДТТ и ЖРД работали по расчетной программе. Направление вектора тяги РДТТ отличалось от расчетного на 0,3° (допустимое отклонение 1°), а вектор тяги проходил в 0,5 мм от центра масс (допустимое отклонение 4,5 мм). В момент прекращения работы РДТТ скорость аппарата относительно Луны равнялась 131,7 м/сек (расчетная скорость 119±33 м/сек. Вертикальная составляющая скорости при посадке аппарата равнялась примерно 3,3 м/сек), а горизонтальная составляющая была очень мала (расчетное значение вертикальной составляющей скорости - не более 6 м/сек, горизонтальной - не более 2,2 м/сек). При сближении аппарата с Луной угол между вектором скорости и местной вертикалью составлял 6° (предельный угол сближения для аппаратов Surveyor равен 45°). 2 июня в 6 час. 17 мин. 37 сек. аппарат совершил посадку в Океане Бурь в точке с селенографическими координатами 2°27' ю. ш. и 43°13' з. д. в 14 км от новой расчетной точки посадки.
Опоры шасси аппарата коснулись поверхности с интервалами 0,01 сек, нагрузки на опоры составили 610, 730 и 520 кг, соответственно. При первом касании аппарата нагрузка на грунт составила 0,56 кГ/см2, после успокоения аппарата - 0,035 кГ/см2. Площадка, на которую сел аппарат, почти параллельна лунному горизонту (уклон не более 1-2°). Первой коснулась поверхности Луны опора 2, затем 1 и 3. Нагрузки при посадке соответствовали тем, которые были рассчитаны по результатам сбросов макета аппарата на имитированный лунный грунт. После первого касания аппарат подскочил на 6 см и опустился через 1 сек., причем опоры погрузились в грунт на 2,5 см. Не развернувшийся в полете стержень с одной из всенаправленных антенн при ударе аппарата развернулся, и антенна в дальнейшем использовалась для связи. В полете связь с аппаратом осуществлялась через одну всенаправленную антенну, на аппарат было послано около 300 прямых команд. Полет аппарата от момента старта ракеты-носителя и до посадки продолжался 63 час. 36 мин. 28 сек.
После посадки были выключены радиолокационный альтиметр, доплеровский радиолокатор и датчики напряжения на посадочных ногах и принята телеметрическая информация, показавшая исправность бортовых систем. После проверки панорамной телекамеры началась передача на Землю изображений лунной поверхности и деталей аппарата с разверткой 200 строк. Передача изображений производилась через всенаправленную антенну (высота Солнца над горизонтом в момент начала съемки - 28°). Было получено около десятка изображений опор посадочного устройства, участка лунной поверхности около аппарата и горизонта. В непосредственной близости от аппарата видны камни высотой 1,5 м и длиной до 2 м. Перед запуском аппарата зеркало панорамной телекамеры было установлено в такое положение, чтобы получить изображение одной из опор посадочного устройства. Расстояние от камеры до опоры составляло 2,4 м. При съемке в кадре фиксируется участок поверхности размером 0,3х0,3 м. Объектив камеры перед запуском аппарата был установлен на минимальное фокусное расстояние. Съемка производилась через нейтральный светофильтр. Первые снимки были переданы в телевизионную сеть США и через связной спутник Early Bird в телевизионную сеть Западной Европы. После передачи изображений была проведена ориентация панели с солнечными элементами на Солнце (в дальнейшем положение панели относительно Солнца корректировалось один раз в сутки), а остронаправленной антенны - на Землю.
Через 3 час. 15 мин. после посадки аппарат был подготовлен для передачи изображений с разверткой 600 строк с помощью остронаправленной антенны. Скорость передачи этих снимков составляла 4400 двоичных единиц в сек. Мощность принимаемого на Земле сигнала составляла 101,7 дб/вт. Со 2 по 8 июня ежедневно, в те периоды (в течение 9-10 час. в сутки), когда аппарат находился в зоне видимости комплекса «Пионер» в Голдстоуне, проводилась передача телевизионных изображений с разверткой 600 строк, в остальное время поступала только телеметрическая информация, принимавшаяся станциями в Крюгерсдорпе и Тидбинбилле. В каждом сеансе станция в Голдстоуне в течение 45 мин. принимала изображения, затем оборудование аппарата во избежание перегрева выключалось на 20-30 мин., после чего начиналась передача телеметрической информации, затем цикл возобновлялся. 4 июня для изучения воздействия истекающих газов на грунт 7 раз включена одна из пар управляющих реактивных сопел системы ориентации, расположенная на опоре № 2. Сопла находятся на расстоянии около 20 см от поверхности и направлены вниз под углом 72° от вертикали. Сопла работали импульсами по 20 мсек с интервалами между включениями в 30 мсек, длительность одного из импульсов составила 1 сек. Общее время работы - 4,5 сек. Сопла развивали тягу 0,014 кГ. Съемка этого эксперимента производилась камерой. Снимки, сделанные до и после включения сопел, различий не имеют. Это позволило предположить, что работа сопел не привела к образованию пылевого облака. К 5 июня на Землю было передано 2503 изображения. В тот же день поворотное зеркало камеры было ориентировано на Сириус и после ряда попыток были получены его снимки, предназначенные для точного определения места посадки аппарата. 8 и 9 июня передача изображений не производилась - был период лунного полудня, и высокая температура поверхности препятствовала нормальной работе оборудования (кроме того, решено предоставить отдых персоналу, обеспечивающему прием и обработку снимков - выяснилась его неподготовленность к обработке большого количества поступающей информации). До 8 июня получено 4000 изображений, часть из них через цветные фильтры, которые реконструировались на Земле в цветные снимки. Позже получены изображения Канопуса и Юпитера, получить телевизионные изображения Земли не удалось.
12 июня отказал потенциометр, проработавший около 100 час. (расчетное время - 25 час.), входящий в систему определения угла возвышения камеры. 14 июня в 15 час. 39 мин. через место посадки прошел лунный терминатор. На телевизионных изображениях, переданных во время и после захода Солнца (съемка производилась в отраженном свете Земли) видны звезды, Солнце, его корона, тень аппарата длиной до 30 м. 14 июня в 16 час. 18 мин. передача изображений прекратилась с наступлением ночи в районе посадки аппарата. С начала съемки до этого момента получено 10 338 телевизионных изображений, с момента посадки на аппарат подано около 10 000 команд. Вероятность возобновления работы аппарата по окончании лунной ночи руководителями полета оценивалась в 25%. Перед прекращением связи панель с солнечными элементами была ориентирована так, чтобы прямые солнечные лучи на нее упали примерно 6 июля, т. е. в лунный полдень, через 7 дней, (29 июня) после восхода Солнца над местом посадки. Это было сделано, чтобы основная батарея и электрические цепи успели прогреться примерно до -23°С прежде, чем начнется подзарядка батареи, иначе вследствие нагрева могли возникнуть неисправности в электрической системе. Первоначально во избежание повреждения бортового оборудования было решено не делать попытки войти в связь с аппаратом до наступления лунного полудня, позже было принято решение войти в связь с аппаратом, не дожидаясь, пока он разогреется на Солнце, чтобы получить температурные и другие характеристики сразу же после восхода Солнца. 16 июня в 20 час. 30 мин. получены последние телеметрические данные: температура на поверхности панели с солнечными элементами (-173°С), в контейнере А (+1,7° С), в контейнере В (-17,8° С), основной батареи (+1,1° С). После этого сеанса все оборудование было выключено за исключением 2-х приемников. Оставшейся в основной батарее емкости (около 100 а-ч) было достаточно для питания приемников до 6 июля. 29 июня, после восхода Солнца над местом посадки, была сделана первая попытка войти в связь с аппаратом, но попытка оказалась неудачной. 30 июня эта попытка была повторена, но также оказалась неудачной. 6 июля в 12 час. 29 мин. в период лунного полудня с аппаратом удалось установить связь. В момент установления связи в контейнере А была температура -6,6° С, в контейнере В +15,5° С. Проверка показала, что бортовые системы работали удовлетворительно, однако мощность, обеспечиваемая солнечными элементами, была на 12% ниже номинальной. 7 июля от панорамной камеры была получена серия из 38 снимков. 9 июля температура основной батареи достигла 54°С (максимальная допустимая температура основной батареи 60°С), однако перегрев батареи удалось предотвратить. Был проведен эксперимент по включению одного из верньерных двигателей и наблюдению степени воздействия истекающих газов на состояние грунта. После проведения эксперимента следов воздействия не было обнаружено. За второй лунный день с 7 до 13 июля получено 812 телевизионных изображений, в их числе изображения Сириуса и Канопуса. Общее время работы аппарата, в течение которого принимались его сигналы до 13 июля, составило 612 час. 14 июля перед заходом Солнца сделана попытка получить изображение солнечной короны, однако при передаче девятого изображения связь с аппаратом внезапно прекратилась, вероятно из-за резкого падения напряжения основной батареи (после захода Солнца прекратилась ее подзарядка). Всего с начала съемки до этого момента от аппарата было получено 11 150 изображений: 23 имеют развертку 200 строк (14 изображений, полученных 2 июля, и неполных 9 изображений солнечной короны, полученных 14 июля), остальные имеют развертку 600 строк (14).
На одном из последних снимков видны разбитые пластинки зеркального стекла, которым облицованы контейнеры. За время полета и функционирования аппарата на Луне с Земли было подано более 100 000 управляющих команд. В конце июля все работы, связанные с аппаратом Surveyor I, были прекращены. 8 октября связь с аппаратом Surveyor I, удалось снова восстановить. Аппарат выполнил посланные команды и передал телеметрическую информацию; бортовое оборудование было исправно, за исключением основной батареи, которая не подзаряжалась солнечными элементами. Питание бортового оборудования обеспечивалось вспомогательной батареей. Сигналы, принимавшиеся на Земле, были очень слабыми. С 8 по 12 октября проведено более 5 полных и несколько неполных сеансов связи. Телевизионные изображения получить не удалось из-за высокого уровня шумов. 12 октября в районе посадки аппарата наступила ночь и связь прекратилась. В ноябре 1966 г. на короткий промежуток времени удалось установить связь с аппаратом, а 9 января 1967 г.- еще раз, последний. Связь установили станции в Тидбинбилле и Крюгерсдорпе, однако уровень принимаемого сигнала был очень низким. Сеанс связи продолжался около 12 час. Попытки включить телекамеру не делались. 15-20 февраля 1967 г. участок посадки аппарата Surveyor I был сфотографирован аппаратом Lunar Orbiter III. На снимках удалось обнаружить аппарат Surveyor I в виде белого пятна и отбрасываемую им тень.
Суммарный вес аппарата при отделении от II ступени - 995 кГ, после посадки на Луну (вес земной) - 281,2 кГ, в т. ч. каркас аппарата - около 27 кГ (ферма 10,5 кГ), крепление оборудования на каркасе - 10,4 кГ. Высота аппарата при сложенном шасси - 3,05 м, диаметр окружности, проходящей через опоры развернутого посадочного шасси, - 4,27 м.
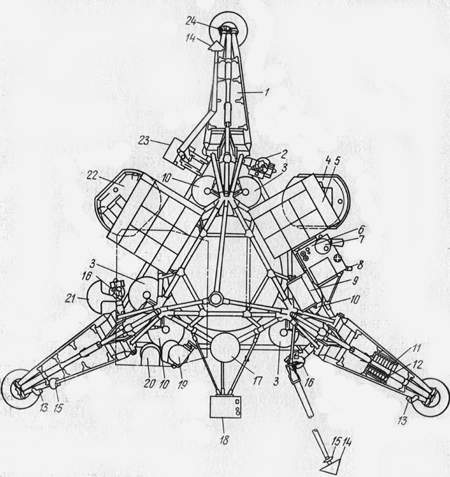
Конструктивная схема аппарата показана на рис. 15. Каркас аппарата изготовлен из алюминиевых (сплав 7075) полых трубок треугольного сечения. К каркасу крепятся 2 всенаправленные антенны, два контейнера (А и В) с электронным оборудованием, тормозной РДТТ, 3 верньерных ЖРД, посадочное шасси и другое оборудование. На верхней части каркаса смонтирована мачта, к которой крепятся остронаправленная антенна и панель с солнечными элементами. В контейнере А размещены 2 приемника, 2 передатчика, основная батарея и различное оборудование системы электропитания, в контейнере В - декодирующее устройство и другое оборудование командной системы. Оборудование в контейнерах смонтировано на панелях сотовой конструкции. Посадочное шасси имеет 3 ноги, изготовленные из алюминиевого листового сплава 7075 толщиной 1 мм с опорами диаметром 20 см сотовой конструкции из алюминиевого сплава. Посадочные опоры шарнирно соединены с корпусом в трех нижних углах основания. Ноги снабжены гидравлическими амортизаторами самолетного типа, гасящими энергию удара при посадке аппарата, и телескопическими тягами, обеспечивающими развертывание шасси после вывода аппарата на траекторию полета. К углам нижней части корпуса крепятся блоки разрушающейся сотовой конструкции из алюминиевого сплава, обеспечивающие амортизацию удара при посадке (при прогибе ног в момент удара блоки касаются поверхности). Конструкция аппарата рассчитана на посадку при вертикальной составляющей скорости до 6 м/сек и горизонтальной составляющей до 2,2 м/сек на склоны крутизной до 15° п при отклонении продольной оси аппарата от вертикали до 10°.
Электрическое соединение со II ступенью ракеты-носителя осуществляется через 51 штырьковый разъем, установленный в нижней части корпуса между двумя посадочными опорами (разъем состыковывается после установки аппарата на ракету-носитель). До момента отделения аппарата через этот разъем проходят команды от программного механизма, установленного на II ступени, а в аварийных ситуациях могут подаваться команды с наземного пульта управления. Через него проходит также цепь питания от наземных источников питания и цепь предстартового контроля. На аппарате используются 29 пиротехнических устройств, в частности, в замках посадочных опор, в силовых приводах, в системе сброса тормозного двигателя, воспламенителе тормозного двигателя. Некоторые из пиротехнических устройств срабатывают по командам от программного механизма, установленного на II ступени (до разделения аппарата), другие - по командам с Земли. На аппарате установлено 24 датчика для измерения нагрузки на элементы конструкции аппарата в момент посадки.
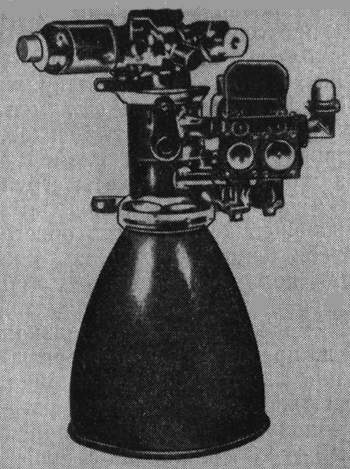
Тормозной твердотопливный двигатель предназначен для торможения аппарата при посадке на Луну (программа работы двигателя дана в типовой программе полета). На аппарате установлен двигатель марки ТЕ-364-1 (рис. 16), разработанный Reaction Motors Div. Двигатель шаровой формы установлен по оси аппарата в центре тяжести и крепится взрывными болтами к корпусу в 3 точках, расположенных около шарниров посадочных устройств. Вес снаряженного двигателя - 624,6 кГ,
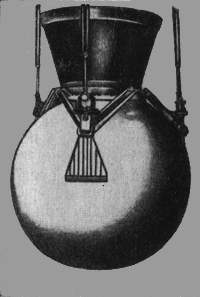 Рис. 16. РДТТ аппаратов
Рис. 16. РДТТ аппаратов
Surveyor.
неснаряженного - 65,4 кГ; тяга (при температуре 10-21° С) - 3,6-4,5 т; длина полная - 133 см, сопла - 73 см; степень расширения сопла - 50; диаметр корпуса - 94 см, критического сечения - 8,3 см, среза сопла 60,9 см; время работы - 40 сек. срабатывания воспламенительного устройства - 0,15 сек. Корпус двигателя изготовлен из стали марки D-6AC с теплоизоляцией из каучука Buna N с заполнителем из асбеста, а сопло из молибдена за исключением закритической части, изготовленной из слоистого пластика. В критическом сечении имеется графитовый вкладыш. Теплоизоляция и внешнее покрытие двигателя обеспечивают температуру топливного заряда не ниже 10° С. В состав топлива (полибутадиенкрилонитрид) входят перхлорат аммония (окислитель), сополимер полибутадиена и акриловой кислоты (горючее-связка), эпоксидная смола (отверждающий реагент) и присадки алюминия и бериллия (содержание бериллия около 12%).
Верньерные жидкостные двигатели предназначены для проведения коррекции траектории (располагаемая величина скорости при коррекции - 50 м/сек), ориентации аппарата во время работы тормозного РДТТ и после окончания работы РДТТ на участке спуска (программа работы двигателей дана в типовой программе полета). Двигатели разработаны Reaction Motors Div. На аппарате установлено 3 верньерных ЖРД «Старлайт» (TD-339) (рис. 17) - один в шарнирном подвесе, остальные - жестко. Двигатели расположены вокруг тормозного РДТТ через 120° и крепятся к каркасу аппарата. Характеристики двигателя (одиночного): тяга - 47,2 кГ; диапазон регулирования - 13,6-47,2 кГ (тяга каждого двигателя может регулироваться дифференцированно), удельная тяга - 287 сек.; давление в камере сгорания - 4,9-17,5 кГ/см2 температура в камере сгорания - 2900° С; степень расширения сопла (с насадком) - 86; вес двигателя (сухой) -2,71 кГ (камера сгорания, сопло, насадок, распылительная головка - 1,35 кГ; клапаны, трубопроводы - 1,36 кГ). Топливом служат самовоспламеняющиеся компоненты - монометилгидразингидрат и четырехокись азота,
Система энергопитания предназначена для обеспечения электроэнергией бортовых систем аппарата во время полета и в период функционирования во время лунного дня. Расчетная минимальная продолжительность работы системы - 30 земных суток (приблизительно одни лунные сутки), максимальная - 90 земных суток. Рабочее напряжение систем аппарата - 29 в. Панель с солнечными элементами площадью 0,84 м2 несет 3960 солнечных n-р элементов, покрытых тонкими листами зеркального стекла; размер элемента 1,2 Х 1,2 см, толщина - 0,45 мм. Элементы сгруппированы в 792 отдельные секции и соединены по последовательно-параллельной схеме, исключающей возможность обесточивания систем при выходе из строя одного элемента. Максимальная мощность в полете при полном освещении Солнцем - 89 вт, на Луне при температуре 60°С - не менее 77 вт, а при температуре 115° С - не менее 57 вт. Удельная мощность - 120,7 вт/кГ, к.п.д. преобразования энергии - 8,2%. Панель сотовой конструкции изготовлена из алюминиевого сплава, ориентация ее на Солнце обеспечивается устройством ASPP с точностью до нескольких градусов. Вес панели с солнечными элементами и ASPP - 4,8 кГ. Панель с солнечными элементами расположена в верхней части аппарата на специальной штанге. При старте панель сложена и раскрывается после выведения аппарата на траекторию полета. Основная химическая серебряно-цинковая батарея обеспечивает энергопитание систем аппарата до ориентации на Солнце панели с солнечными элементами, а также в те периоды, когда необходима пиковая мощность. Батарея состоит из 14 серебряно-цинковых элементов, подзаряжаемых солнечными элементами. Емкость батареи 3800 а-ч при разрядном токе 1,0 а, обеспечиваемое напряжение - 22 в в диапазоне температур от 4 до 60° С. Вспомогательная серебряно-цинковая батарея предназначена для использования в те периоды, когда необходима пиковая мощность, она не подзаряжается от солнечных элементов, размещена в герметичном контейнере, изготовленном из магния, емкость батареи 800-1000 а-ч. Регулятор зарядного тока батареи и регулятор повышения напряжения предназначены для регулирования работы системы энергопитания. Регулятор зарядного тока батареи соединяет панель с солнечными элементами с основной батареей, обеспечивая передачу энергии в количестве, необходимом для полной зарядки батареи, и поддерживая на выходе батареи постоянное напряжение. В регуляторе имеются чувствительные и логические цепи, которые автоматически включают подзарядку батареи, когда напряжение на клеммах батареи падает ниже 27 в. На вход регулятора повышения напряжения подводится постоянный ток напряжением 17-22,5 в от солнечных элементов, основной батареи или от обоих источников одновременно. На выходе регулятора поддерживается напряжение 29 в, которое подводится к трем главным силовым линиям аппарата. Эти три линии питают все оборудование аппарата, кроме нерегулируемой линии напряжением 22 в, которая обеспечивает питание нагревателей, переключателей, силовых приводов, электронных цепей, не требующих для нормальной работы регулировки напряжения или имеющих свой собственный регулятор.
Радио- и телеметрическое оборудование предназначено для связи с наземными станциями слежения, получения и преобразования телеметрической информации о работе бортовых систем и телевизионных изображений к виду, удобному для передачи, и передачи этой информации, а также для дешифровки команд, поступающих на борт. 2 приемника (один запасной) работают в диапазоне S (2200-3950 Мгц) и могут подключаться на любую из 2-х всенаправленных антенн. 2 передатчика (один запасной) могут подключаться на любую из 3 антенн, установленных на аппарате. Несущая частота передатчиков - 2295 Мгц, мощность - 0,1 или 10 вт. При мощности 0,1 вт передатчики работают до отделения аппарата от ракеты-носителя, а затем переходят на работу при мощности 10 вт. Метод модуляции КИМ-ЧМ или КИМ-ФМ-(передатчик мощностью 0,1 вт), КИМ-ЧМ или ЧМ (передатчик мощностью 10 вт); 2 всенаправленные антенны имеют низкий коэффициент усиления, через них ведется прием команд с Земли и передача на Землю телеметрической информации. При передаче телевизионных изображений с использованием всенаправленной антенны обеспечивается развертка изображений в 200 строк. Всенаправленные антенны - конические, шарнирно крепятся на стержнях длиной 1,4 м, развертываются после вывода аппарата на траекторию полета выталкивателями, работающими от пиропатрона, и выводятся в рабочее положение торсионными пружинами. Многодипольная широкополосная плоская остронаправленная антенна с большим коэффициентом усиления используется для передачи телевизионных изображений, обеспечивая развертку изображений в 600 строк. Ориентация антенны на Землю, как и панелей с солнечными элементами на Солнце, обеспечивается устройством ASPP. Декодирующее устройство командной радиолинии рассчитано на обработку 256 команд в обоих направлениях (команды типа «включено-выключено»), а также команд, управляющих временным интервалом работы системы. Любая команда проверяется в центральном блоке декодирования команд; если структура команд неправильна, то команда не проходит, а сигнал отправляется обратно на Землю. Факт приема команды подтверждается передачей соответствующего сигнала на Землю; после этого команда поступает в блок декодирующего устройства, где переводится из двоичного кода в форму, удобную для выполнения соответствующей команды. Телеметрическая система обеспечивает передачу данных о 200 различных параметрах; скорость передачи - 17,2; 137,5; 500; 1100 (при использовании всенаправленной антенны) и 4400 бит/сек (при использовании остронаправленной антенны). Получение большинства телеметрических данных (температура, напряжение, сила тока, давление и т. п.) обеспечивается блоком обработки телеметрии или вспомогательным блоком обработки сигнала. Ни один из 200 регулируемых телеметрических параметров не передается непрерывно; в блоке обработки телеметрических сигналов имеются 4 переключателя, с помощью которых можно последовательно передавать определенные сигналы. Использование переключателей определяется видом и количеством информации, которую нужно передавать на разных этапах работы сиcтемы. Каждый из переключателей может быть включен в работу в любое время. После блока обработки телеметрических параметров коммутированные сигналы аналого-цифровым преобразователем переводятся с центрального блока обработки сигналов в десятичную систему и затем поступают на вход передатчика. Телевизионные сигналы поступают на вход передатчика в том случае, если передатчик работает на полную мощность. Для получения информации о работе оборудования установлены датчики температуры, тензодатчики для оценки реакции верньерного двигателя на команды системы управления, датчики ударной нагрузки в момент посадки аппарата, акселерометры для измерения вибрации элементов конструкции. Вспомогательный блок обработки телеметрических сигналов снабжен двумя дополнительными телеметрическими коммутаторами. Процесс обработки информации происходит таким же образом, как и в блоке обработки телеметрических сигналов.
Система управления полетом и ориентации аппарата (7,20). Первоначально аппарат Surveyor после выхода на траекторию полета предполагали ориентировать относительно Солнца по командам наземных станций слежения системы DSIF. Расчеты показали, что для захвата аппарата станцией слежения может потребоваться до 60 мин., а за это время у неориентированного относительно Солнца аппарата может нарушиться тепловой режим. Поэтому было принято решение использовать автономную систему ориентации относительно Солнца, вторым опорным светилом выбрана звезда Канопус (а Киля). Преимуществом ориентации по Солнцу и Канопусу является возможность надежного определения положения аппарата при его запуске в полнолуние. Запуск в полнолуние важен для работы телекамеры, так как в этом случае будут получаться изображения хорошо освещенной поверхности. Если аппарат ориентировать по Солнцу и Земле (как аппарат Ranger), то при запуске в полнолуние угол между направлением на Солнце и направлением на Землю будет слишком мал для обеспечения надежной ориентации. Основной солнечный датчик состоит из 5 фотоэлементов на CdS, в системе используется также вспомогательный солнечный датчик. Перед захватом Канопуса производится захват Солнца. Реактивные сопла разворачивают аппарат таким образом, чтобы датчик Канопуса был направлен на звезду, при этом ось крена аппарата остается неподвижной. Блок электронного оборудования включает цифровой программный механизм, коммутационное и переключающее устройства, логический преобразователь и преобразователь вида регистрации данных для радиовысотомера и доплеровского радиолокатора. Поступающая от датчиков информация проходит через логическую цепь в блоке электронного оборудования управления полетом, где по этой информации вырабатываются сигналы, управляющие работой реактивных сопел, тормозного и верньерных двигателей. От датчиков Солнца в блок поступает информация об освещенности их чувствительных элементов, на основании этой информации в блоке вырабатываются сигналы на включение соответствующих реактивных сопел и такой разворот аппарата, чтобы датчики были направлены на Солнце. Инерциальный блок используется для управления полетом, если для выполнения коррекции и осуществления посадки не могут быть использованы оптические датчики; переключение на инерциальный блок -автоматическое, блок использует три гироскопа и акселерометр. Сигналы с гироскопов, проходя через блок электронного оборудования управления полетом, включают соответствующие реактивные сопла, изменяющие или поддерживающие требуемое положение аппарата. На этапе посадки аппарата инерциальный блок управляет работой верньерных двигателей, изменением их тяги по каналам курса и тангажа и поворотом двигателя по каналу крена. Величиной суммарной тяги двигателей управляет акселерометр. Разработчик аппаратуры инерциальной системы ориентации - Кеагfott Div. Доплеровский радиолокатор (AMR-Altitude/Marking Radar-радиолокатор, регистрирующий высоту), предназначен для измерения расстояния до Луны на подлетном участке и выдачи сигналов на бортовые устройства; программа работы радиолокатора дана в типовой программе. Разработчик радиолокатора Ryan Aeronautical Co. Радиолокационный альтиметр (радиовысотомер) предназначен для измерения расстояния до Луны после прекращения работы радиолокатора AMR. Доплеровский радиолокатор (доплеровский датчик скорости) начинает работать, как и альтиметр, после включения РДТТ. Радиолокационный альтиметр в сочетании с доплеровским радиолокатором получил обозначение RADVS (Radar Altimeter and Doppler Velosity System - система радиолокационного альтиметра и доплеровского измерителя скорости). Разработчик RADVS - Ryan Aeronautical Co.
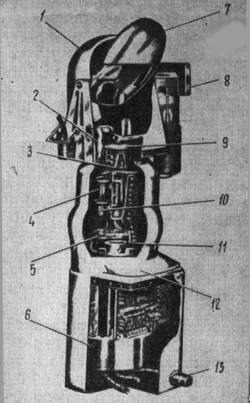
Рис. 18. Панорамная телевизионная камера.
1- кожух; 2 - электродвигатель для поворота зеркала 7 по азимуту; 3 - объектив с изменяемым фокусным расстоянием; 4 - потенциометр; 5 - затвор; 6 - преобразователь; 7 - зеркало; 8 - устройство для поворота зеркала по углу места; 9 - диск со светофильтрами; 10 - потенциометр; 11 - видикон; 12 - радиатор видикона; 13 - электрический разъем.
Параболические антенны радиолокационного альтиметра и доплеровского радиолокатора излучают по два луча каждая. Лучи 1, 2 и 3 могут излучаться по вертикали или по направлению скорости полета, луч 4 обеспечивает измерение высоты над поверхностью или наклонной дальности. Лучи 1, 2, 3 используют эффект Доплера, дают информацию о скорости снижения. Данные о высоте и скорости снижения поступают в блок гироскопов и логическую схему, где вырабатывается сигнал управления верньерными двигателями. Управляющие реактивные сопла обеспечивают управление положением аппарата с момента отделения от II ступени ракеты- носителя до включения тормозного двигателя. 3 пары сопел размещены попарно (противоположно направлены) на концах посадочных опор; тяга каждой пары сопел по 14 г. У каждой пары сопел имеется свой селеноидный клапан включения. Одна пара сопел управляет движением аппарата в горизонтальной плоскости, сообщая аппарату вращательное движение, две другие пары - по каналам тангажа и курса. Рабочим телом служит сжатый азот весом 2 кГ, размещенный в сферическом баллоне.
Телевизионное оборудование предназначено для получения телевизионных изображений лунной поверхности в районе посадки. Панорамная телевизионная камера (рис. 18) предназначена для получения изображений после посадки аппарата на поверхность Луны. Вертикальное сканирование камеры обеспечивается подвижным эллиптическим зеркалом, горизонтальное - поворотом головки камеры. Шаг поворота зеркала 3°±0,°1 - по-азимуту и 2°,48'±0°,1 - по высоте. При наклонах зеркала и поворотах его в поле зрения камеры попадает часть посадочной опоры аппарата и другие элементы конструкции. Расстояние камеры до посадочной опоры составляет 2,4 м. Наводка на резкость от 1,2 м до ∞ осуществляется по командам с Земли. Установка диафрагмы производится по командам с Земли или автоматически в зависимости от уровня освещенности. Фокусное расстояние переменное и может регулироваться, диафрагма может изменяться от 4 до 22. Разработчик объективов с изменяемым фокусным расстоянием - Bell and Howell Co. Шторка затвора расположена в фокальной плоскости. При необходимости по командам с Земли можно обеспечивать любую длительность экспозиции. При слишком большой освещенности (при изменении площади обзора камеры, угла поворота зеркала или величины диафрагмы высоты Солнца) блокирующее устройство по команде через чувствительный элемент препятствует открытию затвора. Этот же чувствительный элемент управляет автоматической установкой диафрагмы; по команде с Земли действие чувствительного элемента может быть заблокировано. В таблице 6 приведены характеристики панорамной телекамеры.
| Характе- ристики | Фокусное расстояние объектива, мм | Разрешающая способность | Угол обзора, град | Сканирование | Глубина резкости объектива,м | Длительность экспозиции, м/сек (в автоматическ. режиме) | ||
| угловая, мрад | линейная, мм | вертикальное, град | горизон- тальное, град | |||||
| Величина | 25 100 | 2 0,5 | 19 6.3 | 6,4 25,4 | (+40)-- (-60) | 360 | от 1,2 до ∞ | 150 |
Камера снабжена нейтральным и 3-цветными (красный, синий, зеленый) светофильтрами, смена которых осуществляется по командам с Земли. Камера может обеспечивать получение удовлетворительных изображений при освещенности 2 лк. Передающей трубкой является видикон с электростатической фокусировкой и магнитным отклонением.
В таблице 7 приведены режимы передачи телевизионных изображений.
Камера имеет три режима работы. При работе в первом режиме (изображения с разверткой 600 строк) камера работает с периодом 3,6 сек. В течение 1 сек. происходит считывание; 0,2 сек. используется для экспозиции (одновременно передается телеметрическая информация о положении зеркала и о температуре окружающей среды); 2,4 сек. используются для подготовки фотокатода видикона и записи следующего кадра. Во втором режиме (изображения с разверткой 200 строк) камера работает с периодом 60,8 сек.
| Передача изображений через антенну | Скорость передачи изображений, дв.ед.в сек | Время | ||||||
| остронаправленную | всенаправленную | |||||||
| раз- вёртка, строк | полоса видео- сигнала, кгц | периодичность получения изображений, сек | раз- вёртка, строк | полоса видео- сигнала, кгц | периодичность получения изображений, сек | передачи одного снимка, сек | между передачей 2 снимков, сек | |
| 600 | 220 | 3,6 | 200 | 1,2 | 60,8 | 4400 | 1,1 | 2,5 |
Система терморегулирования обеспечивает поддержание заданного температурного режима бортовых систем аппарата. Терморегулирование оборудования, установленного в контейнерах А и В и вне их, осуществляется активными и пассивными средствами. В контейнере А температура должна поддерживаться в пределах 4-52° С, система терморегулирования контейнера весит 11,3 кГ. В контейнере В температура должна поддерживаться в пределах -18- +52° С, система терморегулирования контейнера весит 8,2 кГ. Толщина внешней стенки контейнеров, изготовленных из алюминиевых сплавов, равна 0,5 мм. Между внешней и внутренней стенками обоих контейнеров проложена теплоизоляция из 75 листов майлара с алюминиевым покрытием; толщина одного слоя 6 μ, общая толщина около 25 мм. Снаружи контейнеры облицованы пластинками зеркального стекла. При падении температуры ниже указанного предела включаются установленные в контейнерах нагреватели, при повышении температуры полки, на которых смонтировано оборудование, подключаются к радиаторам, отводящим тепло. В обоих контейнерах имеются датчики температуры, показания которых по телеметрическим каналам передаются на Землю, и блоки нагревателей для поддержания температуры в заданных пределах. В контейнерах установлены термовыключатели, которые в случае повышения температуры более 52°С автоматически срабатывают и отводят часть тепловой энергии к радиатору, в контейнере А установлено 9, в контейнере В - 6 термовыключателей. Для обогрева оборудования используется около 3 вт мощности системы электропитания. Терморегулирование оборудования, не заключенного в контейнерах, обеспечивается его окраской или полировкой. Цвет аппарата - белый.
Слежение и связь с аппаратами Surveyor осуществлялась станциями системы DSIF. В сеть станций системы DSIF входили: комплекс «Пионер» в Голдстоуне, включающий 2 станции с антеннами, имеющими отражатели диаметром 64 и 26 м; станция «Марс» в Голдстоуне с диаметром отражателя антенны - 64 м, использовавшаяся как вспомогательная к комплексу «Пионер»; станция в Робледо-де-Чавела (Испания, в 46 км к северо-западу от Мадрида) с диаметром отражателя антенны 26 м; станция в Крюгерсдорпе (ЮАР, в 32 км к западу от г. Иоганнесбург) с диаметром отражателя антенны 26 м; станция в Айленд - Лагун (Австралия, полигон Вумера) с диаметром отражателя антенны 26 м; станция в Тидбинбилла (Австралия, близ г. Канберра) с диаметром отражателя антенны 26 м. Станции системы DSIF имеют передающую частоту 2110-2120 Мгц, приемную-2290-2300 Мгц. Станции образуют пары, разнесенные примерно на 120° по долготе с некоторым перекрытием углом обзора, что дает возможность непрерывной связи с аппаратом, причем он находится одновременно в пределах видимости 2 станций одной пары. Руководство работой станций, управление аппаратами и все необходимые расчеты проводились координационно-вычислительным центром SFOF (Space Flight Operations Facility-Центр по обслуживанию космических полетов) в г. Пасадене (шт. Калифорния), созданным и подчиненным Лаборатории реактивного движения. В задачи SFOF входят контроль работы бортовых систем, определение параметров траектории полета, расчет уставок для маневров и контроль их выполнения, прием научной информации, управление работой научных приборов. В соответствии с назначением SFOF персонал КВЦ был разбит на баллистическую, телеметрическую и группу управления. В отдельные моменты в слежении и управлении аппаратом участвовало до 300 человек. Телеметрические данные от аппаратов поступали на станции по 500 каналам. Центр SFOF имеет, в частности, аппаратуру для реконструкции телевизионных изображений, передаваемых построчно, и аппаратуру для их экспресс-анализа.