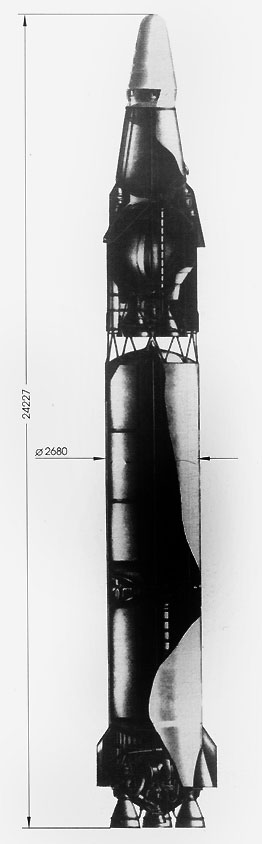
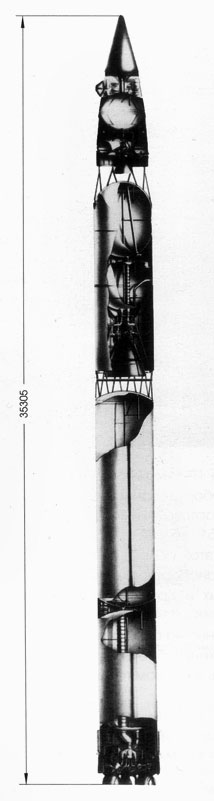
 Ракета Р-9А на кислородно-керосиновом топливе Основные характеристики ракеты Р-9
| ||
 Р-9
|
баллистической ракеты Р-9. Глобальная ракета ГР-1
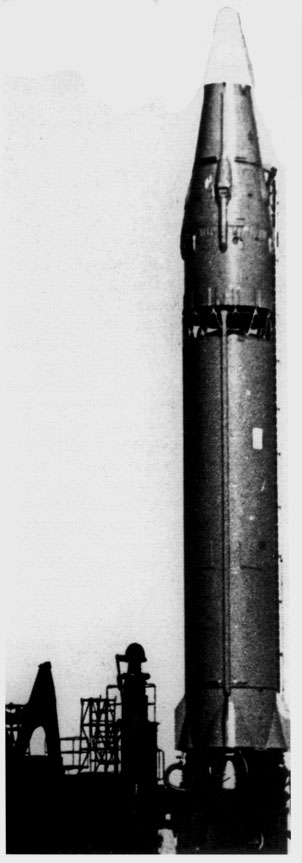
Ракета Р-9
В апреле 1958 года главные конструкторы, входящие в Совет главных конструкторов, оправили в Правительство СССР предложение о разработке новой межконтинентальной баллистической ракеты Р-9 на ракетном топливе кислород — керосин с начальной массой около 100 т. Такое предложение основывалось на достигнутом к тому времени прогрессе в создании более экономичных двигателей и головных частей с ядерным зарядом значительно меньшей массы, что позволяло уменьшить стартовую массу ракеты более чем в три раза по сравнению с ракетой предыдущей разработки Р-7. В марте 1959 года было получено согласие Министерства обороны СССР на разработку такой ракеты со сроком сдачи ее на вооружение в 1961 году.
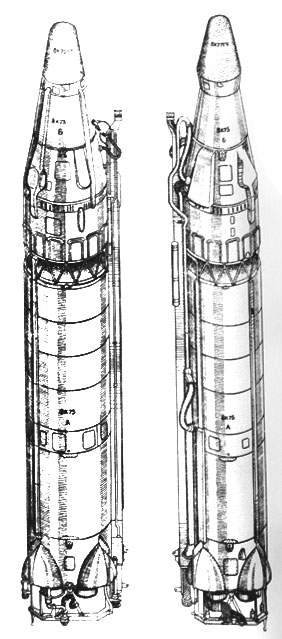
После дополнительных проработок ОКБ-1 предложило разработать два варианта ракеты: Р-9А (индекс 8К75) и Р-9В (индекс 8К76), которые отличались используемыми компонентами ракетных топлив и двигательными установками. Особенностью ракеты Р-9В было использование двигательной установки, разрабатываемой в ОКБ-2 (A.M. Исаев) из связки четырех двигателей с тягой по 40 тс каждый (на высококипящих компонентах топлива керосин — азотная кислота). При создании этого варианта предполагалась кооперация с ОКБ-586 (М.К. Янгель, г. Днепропетровск). Эти три организации (ОКБ-1, ОКБ-2 и ОКБ-586) должны были совместно разработать эскизный проект. Такую концепцию приняли в связи с тем, что на том этапе развития боевой ракетной техники было не вполне ясно, какая из пар компонентов обеспечит лучшие условия эксплуатации в воинских частях и минимальное время подготовки ракеты к пуску. Эти показатели определялись сложностью систем для поддержания компонентов топлива в готовности к заправке и их токсичностью, временем, необходимым для заправки ракеты, и временем раскрутки гироскопов перед пуском. Учитывая, что время готовности к пуску у обоих вариантов ракеты примерно одинаковое, а эксплуатационные качества, включая безопасность работ с ракетой, предпочтительнее для компонентов керосин — кислород, ОКБ-1 настояло на принятии к дальнейшей разработке ракеты Р-9А на этих компонентах. Одним из основных достоинств ракеты как боевого оружия считается максимально возможное время пребывания ракеты в готовности № 1 и минимальное время подготовки к пуску, Решение этих задач облегчалось при хранении ракеты длительное время в заправленном состоянии. Для кислородной ракеты длительное хранение в заправленном состоянии было практически исключено, поэтому требовались иные подходы. Следовало добиться, чтобы все системы и агрегаты ракеты Р-9 допускали бы ее пребывание в готовности № 1 в течение года при условии периодического проведения (без снятия со старта) регламентных работ, а также чтобы время заправки ракеты укладывалось в общее время подготовки ракеты Р-9 к пуску из готовности № 1. Таким образом исключалась необходимость длительного хранения ее в заправленном состоянии.
В Постановлении Совета Министров СССР по ракете Р-9, принятом 13 мая 1959 года, специально отмечалось, что в качестве окислителя должен применяться переохлажденный кислород. Это позволяло обеспечить хранение кислорода в наземной емкости и заправку его в ракету практически без потерь и за минимальное время, не превышающее времени подготовки приборов системы управления к пуску (главным "ограничителем" выступало время подготовки гироскопов). В ходе эскизного проектирования были рассмотрены пять принципиальных схем ракеты, в том числе с различным количеством ступеней, поперечным делением ступеней, обеспечивающих требуемые тактико-технические характеристики при максимально возможной простоте и мобильности и минимально возможной массе конструкции.
Это было достигнуто принятием целого ряда конструктивно-компоновочных решений, например, применением открытых ферменных отсеков для сочленения ступеней ракеты, сбрасываемого хвостового отсека на II ступени, использованием паров наддува бака горючего II ступени для отделения ГЧ и т.д.
Габариты ракеты выбирались исходя из возможности транспортировки ее в собранном виде в одном железнодорожном вагоне и использования сварочно-штамповочного оборудования ракеты Р-7 для производства блоков ракеты Р-9.
Необходимые аэродинамические характеристики были достигнуты благодаря применению стабилизаторов на блоке А (I ступень) и аэродинамических щитков на хвостовом отсеке блока Б (II ступень), а также установке обтекателей для защиты от воздействия воздушного потока выступающих частей сопел двигателя блока А. Каждый из стабилизаторов блока А состоял из двух частей: пилона, жестко связанного с корпусом, и консоли, крепящейся к нему. Для транспортирования консоли были сделаны съемными, впоследствии съемная часть стабилизаторов не использовалась.
Разделение ступеней происходило по "горячей" схеме, принятой и успешно используемой для III ступени ракеты Р-7. Предусматривались силовая открытая рама, отнесенная к блоку А, и переходный отсек, состоящий из трех разъемных створок, который до разделения выполнял функции хвостового отсека блока Б, а после разделения сбрасывался.
При этом силовая схема отражателя выполнена с учетом разгрузки внутренним давлением бака окислителя, Двигательная установка разрабатывалась с учетом возможности проведения скоростной заправки баков топливом (кислород — керосин), пребывания ракеты в заправленном состоянии в течение 24 ч, дистанционного управления операциями на старте, максимальной автоматизации подготовки к старту, запуска двигателя I ступени как автоматически, по сигналу окончания заправки баков компонентами, так и вручную, в нужное время, без вскрытия люков и без доступа обслуживающего персонала к агрегатам и приборам ракеты Р-9.
Для блока А разработчики ракеты проанализировали несколько вариантов схем двигателя и выбрали четырехкамерный двигатель с единым турбонасосным агрегатом, расположенным между камерами, при этом камеры сгорания, ТНА, газогенераторы и другие элементы двигателя вместе с рамой объединялись в единый технологический агрегат. Подобное построение схемы двигателя было выбрано и для блока Б.
На блоке А управление ракетой осуществлялось качанием камер маршевого двигателя, а на блоке Б — специальными поворотными соплами с использованием отработанного турбинного газа. Качание камер двигателей I ступени осуществлялось впервые разработанным центральным гидравлическим приводом, использующим в качестве рабочей жидкости керосин, отводимый после ТНА основного двигателя.
Идея подобного центрального привода, но с более совершенной цифровой системой управления в дальнейшем использовалась и для управления ракетой "Энергия". Эти работы проводились с участием ОКБ-456.
Двигатель блока А был разработан в ОКБ-456 (В.П. Глушко), а двигатель блока Б — в ОКБ-154 (С.А. Косберг).
Максимальные отклонения от цели при комбинированной CУ (автономное и радиоуправление): по дальности — до 8 км для 90% ракет и до 12 км — для оставшихся 10%, боковое отклонение — до 5 км для 90% ракет и до 8 км — для оставшихся 10%. При полностью автономной системе управления точности ухудшались: отклонение по дальности — до 20 км, боковое — до 10 км.
Конструкция ракеты предусматривала обслуживание на стартовой позиции в вертикальном положении без применения каких-либо специальных приспособлений и без открытия люков. Заправка блоков А и Б производилась на пусковом столе. На блоках А и Б трубопроводы и кабели для связи с наземным оборудованием были проложены снаружи по борту ракеты и через разъемные колодки и штекеры выводились на срез обтекателей камер двигателя блока А.
Для блока Б связь бортовых коммуникаций с наземным оборудованием осуществлялась через желоб бортовых коммуникаций — мачту облегченного типа одноразового действия, являющуюся принадлежностью ракеты. При установке ракеты Р-9 на пусковой стол нижний конец желоба бортовых коммуникаций крепился шарнирно к поворотной части стола. Через ЖБК проходили коммуникации заправки блока Б компонентами ракетных топлив и газами, а также электрические цепи. Расстыковка коммуникаций ракеты и ЖБК и его отброс происходили непосредственно перед стартом ракеты. Предстартовые проверки бортовых систем практически сводились к предпусковому включению и регулированию. Все операции максимально совмещались по времени. На ракете Р-9 с помощью внедренных технологических мероприятий впервые в практике ОКБ-1 обеспечивалась взаимозаменяемость всех стыкуемых основных отсеков и агрегатов. При общей сборке использовался оправдавший себя на предыдущих ракетах опыт горизонтальной сборки и контроль геометрических параметров по реперным точкам на специальном стенде. Таким образом, конструктивные особенности ракеты Р-9 и принятая технология изготовления позволяли без существенной переделки оборудования цехов завода 88 быстро и даже параллельно с Р-7 вести освоение и переход к серийному выпуску новой ракеты Р-9.
К моменту завершения в октябре 1959 года эскизного проекта ракеты Р-9 были выданы и согласованы задания всем смежным организациям, выпущен комплект рабочих чертежей, изготовлена технологическая оснастка и начато изготовление отдельных агрегатов ракеты. В эскизном проекте было также предусмотрено дальнейшее совершенствование характеристик ракеты Р-9. Для этой цели разрабатывались новые двигатели: двигатель НК-9 для блока А с улучшенными характеристиками за счет использования замкнутой схемы, созданный в ОКБ-276 (Н.Д. Кузнецов, г. Куйбышев), и связка из четырех двигателей для блока Б на базе создаваемого в ОКБ-1 двигателя блока Л ракеты-носителя "Молния". Ракета с усовершенствованными двигателями получила индекс Р-9М.
Анализ показал, что при применении на блоках А и Б новых двигателей, при сохранении габаритов и начальной массы ракеты, без переделки баков максимальная дальность могла быть увеличена на 2700 км. При сохранении же заданной дальности и массы головной части с новыми двигателями начальная масса ракеты уменьшалась на 13 т. Однако ОКБ-276 не удалось своевременно организовать работу по новому двигателю НК-9 для первой ступени Р-9 из-за отсутствия экспериментальной базы, а В.П. Глушко добился решения оставить для ракеты Р-9 в качестве единственного варианта для 1 ступени (блока А) разрабатываемый им двигатель, считая ненужной разработку двигателя НК-9.
Для расширения тактических возможностей ракеты Р-9, в ОКБ-1, по инициативе В.П. Мишина, прорабатывалась конструкция ракеты Р-9 с экранно-вакуумной теплоизоляцией на кислородных баках (индекс ракеты 8К77), обеспечивающей длительное ее хранение в заправленном состоянии. В качестве двигателей предлагалось использовать двигатели варианта ракеты Р-9М, рассмотренного ранее в эскизном проекте. Применение этих высокоэнергетических двигателей позволяло при сохранении рабочего запаса топлива оснастить ракету более тяжелой и соответственно более мощной по тротиловому эквиваленту головной частью, а также иметь экранно-вакуумную теплоизоляцию на баках окислителя. Но этот вариант развития не получил в связи с большими осложнениями при изготовлении защитной оболочки (сталь толщиной 0,5 мм) для экранно-вакуумной теплоизоляции (сложности со сваркой и креплением). Проектная разработка ракеты Р-9 и ее вариантов проводились в отделе 3, который возглавлял О.С. Крюков, в секторах П.И. Ермолаева, П.А. Ершова, А.Ф. Кулябина, Л.С. Плосконоса. Непосредственно в разработке принимали участие сотрудники этого отдела И.П. Фирсов, А.П. Фролов, А.И. Нечаев, П.М. Воробьев, Б.П. Сотсков, Е.Л. Горбенко, Л.Г. Садовая, А.Д. Поляков, И.Л. Минюк, В.А. Борисов, В.Г. Михеев, Ю.В. Бирюков, Е.П. Фролова, С.Ф. Пармузин, Н.А. Задумин, В.М. Протопопов, Г.Я. Александров, А.А. Ржанов. Баллистические расчеты проводили С.О. Лавров и Р.Ф. Аппазов.
Проектирование и разработка системы управления Р-9 проводились под руководством главного конструктора Н.А. Пилюгина. В создании системы управления от ОКБ-1 непосредственное участие принимали Б.Е. Черток, В.А. Калашников, О.Н. Воропаев, Л.И. Алексеев, Е.И. Копоть, Л.Б. Вильницкий, В.И, Шутенко и др.
Тактико-техническими требованиями на ракету Р-9 предусматривалось создание двух типов наземных комплексов: "Десна-Н" — при наземном пуске и "Десна-В" — при шахтном, Главным конструктором по наземному комплексу был назначен В.П. Бармин (ГСКБ "Спецмаш").
Для проведения летно-конструкторских испытаний ракеты было решено в максимальной степени использовать сооружения и наземное оборудование ракетного комплекса Р-7 и существенно сэкономить средства и время на подготовку летных испытаний ракеты Р-9. Одновременно проводились поисковые проектные работы в ОКБ-1 по различным вариантам боевого базирования ракеты Р-9 (наземный, траншейный, шахтный, морской, контейнерный и др.). Особое внимание уделялось экономичности комплексов. Вначале в целях удешевления исходили из многоразового использования стартов и лишь после глубокого анализа пришли к выводу об оптимальности одноразового использования одиночно расположенного старта с высокой боевой готовностью, хотя это было гораздо дороже.
 Подготовка ракеты Р-9 к пуску в монтажно-испытательном корпусе 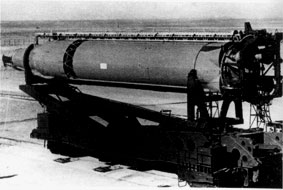 Транспортирование ракеты Р-9 на транспортно-установочном агрегате на старт 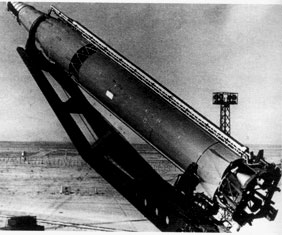 Установка ракеты Р-9 на пусковое устройство
Установка ракеты Р-9 на пусковое устройство |
 Ракета Р-9 установлена на пусковое устройство |
Другой особенностью комплекса ракеты Р-9 явилось системное решение проблем, связанных с длительным хранением жидкого кислорода. Этому предшествовал комплекс научно-исследовательских, проектно-конструкторских и опытных работ, направленных на существенное сокращение потерь кислорода от испарения при хранении в наземных емкостях, при транспортировке и после заправки в баки ракеты.
В отделе 13 (начальник Б.А. Соколов) ОКБ-1 была создана система переохлаждения, длительного хранения и скоростной заправки ракеты переохлажденным жидким кислородом и решена проблема его длительного хранения без потерь. За счет применения принципиально новых видов изоляции емкостей с жидким кислородом (порошковая, экранно-вакуумная теплоизоляция — ЭВТИ) в сочетании с вакуумом в теплоизолирующем пространстве емкости и выбора оптимальной формы наземных и транспортных емкостей хранения кислорода и баков ракеты, разработки специальных конструкций подвесок и опор емкостей хранения кислорода, новых конструкционных материалов, выбора оптимального способа термостатирования криогенных жидкостей, внедрения переохлаждения удалось сократить суточные потери кислорода от испарения с 15% на начальном этапе до 0,05-0,2% на этапе выхода ракеты Р-9 на летные испытания.
Замена существовавших видов изоляции (мипоры, шлаковаты) на порошки (аэрозоль, перлит и др.), которыми заполнялось пространство между емкостью и наружным кожухом, и вакуумирование этого пространства превращали емкость для хранения кислорода в большой термос и резко сокращали теплоприток к емкости кислорода, а следовательно, и его потери от нагревания и испарения. Этот эффект еще более усиливался при использовании ЭВТИ, которая представляла собой маты из листов блестящей тонкой фольги (около 100 слоев), отделенных друг от друга редкой стеклотканью. Блестящая поверхность фольги резко уменьшала передачу тепла к емкости с кислородом, а вакуум в теплоизолирующем пространстве емкости значительно увеличивал эффективность этого решения.
Для создания системы вакуумирования на многочисленных объектах хранения кислорода был спроектирован и создан специальный форвакуумный насос в сочетании с двумя адсорбционными насосами с применением нового синтетического материала — цеолита, предварительно охлаждаемого жидким кислородом или азотом. Такая конструкция позволила довести вакуум с уровня 5x10-2 до 1x10-3 -1x10-4 мм рт, ст. Это также потребовало освоения новой технологии сварки для получения полной герметичности многометровых сварных швов емкостей хранения, создания методики и аппаратуры контроля их качества. Все описанные выше мероприятия сводили к минимуму испарения жидкого кислорода.
Для полного решения проблемы была создана специальная газовая холодильная машина на кислородном уровне температур, которая, будучи установлена на емкости с жидким кислородом, конденсировала испарившийся из емкости газообразный кислород и возвращала его обратно в емкость уже в жидком состоянии. Так впервые в отечественной практике была решена проблема длительного хранения жидкого кислорода практически без потерь.
Однако исследования показали, что есть еще возможность повысить эффективность применения жидкого кислорода: если его температуру понизить ниже точки кипения при нормальных условиях (переохладить до температуры минус 203-210°С), то он приобретает новые качества, среди которых главное для заправки — высокая текучесть. Это позволяло резко сократить время заправки (с 25-30 до 3-8 минут), при этом вместо насосов можно было использовать сжатый воздух, который выдавливал жидкий переохлажденный кислород из емкости хранения (стационарной или транспортируемой) в баки.
В ОКБ-1 для переохлаждения жидкого кислорода спроектировали и изготовили передвижную установку, в которой использовался принцип эжекции и уноса паров с поверхности жидкого кислорода в емкости за счет перепада давления в эжекторе. Позже переохлаждение криогенных жидкостей (кислорода, водорода, азота, гелия) нашло широкое применение в ракетно-космических комплексах Н1 и "Энергия — Буран" на тысячах тонн криогенных компонентов.
Переохлаждение криогенных жидкостей методом эжектирования подкупает своей простотой — не требуется специального сложного оборудования, достаточно подобрать мощный компрессор. Но за простоту надо платить — в процессе эжектирования до 10% криогенной жидкости выбрасывается в атмосферу, а получение 1 кг жидкого кислорода требует примерно 1,2 кВтч электроэнергии. Переохлажденный жидкий кислород может заправляться в баки ракеты с расходом до 700 т/ч, жидкий водород — 110 т/ч. Будучи переохлажденным, жидкий кислород обеспечивал стоянку заправленной ракеты Р-9, готовой к пуску, в течение десяти часов при высоком уровне безопасности работ при заправке.
В докладных записках на имя министра Д.Ф. Устинова и заместителя Председателя Госплана СССР В.М. Рябикова в мае 1961 года С.П. Королев изложил основные итоги работ по кислородной проблеме и подчеркнул фундаментальное значение полученных результатов для развития ракетной техники, в том числе для создания боевых ракетных комплексов высокой готовности, способных длительное время нести боевое дежурство практически без потерь кислорода.
А ведь всего несколько лет до этого крупные специалисты ракетчики и военные считали жидкий кислород непригодным компонентом для боевых ракет. Между тем внедрение новых систем хранения и заправки жидкого кислорода только для ракеты Р-9 дало экономию свыше 50 млн. руб. (это была очень большая сумма по тем временам). В работах по кислородной проблеме активное участие от ОКБ-1 принимали В.П. Мишин, А.П. Абрамов, Б.А. Соколов, В.Н. Корваль, B.C. Овчинников, А.В. Пучинин, Н.Д. Подколзин, К.И. Баранов, А.Ф. Токовцев, М.Б. Гендлер, М.А. Зимин, А.И. Никонов, В.Д. Новиков, А.Г. Казенов, А.В. Шибанов, Ю.Н. Васильев, Г.А. Андреев, А.Ал. Морозов, А.С. Федотов, В.В. Огурцов и др.
В процессе подготовки ракеты Р-9 к летным испытаниям была проведена замена головной части на более тяжелую, разрабатываемую для варианта ракеты Р-9 с индексом 8К77, за счет выявленных по завершении конструкторских работ резервов. В такой комплектации ракета в ряде документов вновь получила обозначение Р-9А при сохранении индекса 8К75.
Летные испытания ракеты Р-9 начались 9 апреля 1961 года (первый успешный пуск -21 апреля 1961 года) на приспособленном стартовом комплексе, продолжались на экспериментальном боевом комплексе "Десна-Н" до 14 февраля 1963 года и завершились на боевых комплексах "Долина" и "Десна-В" в феврале 1964 года. Вначале было много аварийных пусков (из первых 32 пусков 15 аварийных), ракета иногда падала прямо на стартовую площадку, разрушая пусковое оборудование. При этом выявились недостатки компоновки и конструкции отдельных узлов пускового стола и особенно переходной рамы. Переходная рама оказалась очень громоздкой и тяжелой, ее масса достигала 4,5 т и составляла 50% массы сухой ракеты. Было слишком много ручных операций, что удлиняло процесс подготовки к пуску, требовало квалифицированного боевого расчета. Сложным и длительным оказался процесс установки ракеты на пусковой стол, недостаточно быстрой оказалась заправка компонентами топлива, низкой была степень автоматизации всего технологического цикла подготовки пуска, который составлял по времени почти 2 ч. Стало ясно, что надо радикально решать проблему длительного хранения жидкого кислорода с минимальными потерями, сокращать время заправки ракеты.
Все это привело к тому, что стартовый комплекс "Десна-Н" был признан не соответствующим тактико-техническим требованиям и его не рекомендовали для принятия на вооружение Ракетными войсками стратегического назначения. Следует отметить, что комплекс "Десна-Н" был отвергнут не из-за грубых конструктивных просчетов. Причина была в том, что проектирование шло несистемно, без учета опыта эксплуатации и повышенных требований заказчика. Высокие боевые и эксплуатационные качества ракеты Р-9А, подтвержденные при ЛКИ, требовали создания совершенного стартового комплекса с высокой боевой готовностью. Высоких результатов можно достичь только при условии подхода к ракете и стартовому комплексу как к единому целому, отрешившись от ведомственного эгоизма. Необходимо было менять психологию разработчиков.
С.П. Королев принялся за выполнение этой задачи со всей присущей ему страстностью и энергией. ОКБ-1 стало головной организацией, главным идеологом нового комплекса наземного оборудования для ракеты Р-9. Была создана комплексная бригада по модернизации комплекса "Десна-Н" под руководством ведущего конструктора М.С. Хомякова, которая выполнила проектные проработки, подтвердившие реальность создания нового наземного комплекса "Долина" с высокой степенью автоматизации процессов подготовки и пуска ракеты Р-9. Была разработана и изготовлена новая переходная рама, втрое легче прежней, что позволило транспортировать ракету Р-9А в вагоне с пристыкованной рамой.
В ГСКБ "Спецмаш" разработали систему скоростной заправки ракеты горючим — керосином Т-1. К сожалению, не удалось убедить разработчиков использовать для заправки ракеты Р-9А керосином вытеснительную подачу с применением сжатого воздуха, и в принятой схеме заправки для перекачки керосина в баки ракеты Р-9А использовали насос.
В ЦКБ транспортного машиностроения (В.П. Петров) было создано эффективное устройство для установки ракеты Р-9А на пусковой стол за 30 секунд одним оператором. Впервые в ОКБ-1 создана и изготовлена на заводе "Красная заря" в Ленинграде автоматизированная система подготовки ракеты к старту, причем принятые в ней классические решения использовались в дальнейшем для ряда новых ракет-носителей разработки ОКБ-1. В ракетной отрасли был сделан качественно новый шаг по пути автоматизации комплекса работ при подготовке ракеты к пуску. АСПС представляла собой единую автоматическую систему, охватывающую весь комплекс автоматических систем управления отдельными агрегатами и системами CK, которые участвуют в установке ракеты с ГЧ на пусковое устройство, пристыковке к ним наземных коммуникаций, заправке компонентами топлив, их термостатировании и подготовке бортовой аппаратуры к пуску ракеты.
Автоматизированная система подготовки ракеты к пуску также управляла операциями по полуавтоматическому сливу компонентов топлив из баков ракеты при несостоявшемся пуске, а также съемом ракеты с пускового устройства. Агрегаты и системы АСПС управлялись с центрального пульта подготовки автоматически или вручную. Большой вклад в создание, отработку и внедрение АСПС в наземный комплекс ракеты Р-9А внесли В.М. Караштин, И.В. Земцов, А.Г. Жоров, В.Д. Голуб, М.А. Комиссаров, М.М. Басина и др.
 Шахтное пусковое устройство ракеты Р-9А 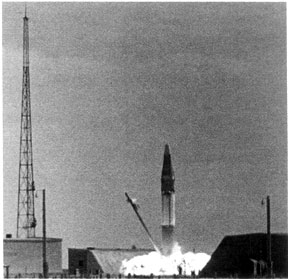 Старт ракеты Р-9А с комплекса "Долина" |
С.П. Королев вскоре решил провести специальную демонстрацию автоматизированного комплекса "Долина" ракеты Р-9А для главных конструкторов, разрабатывающих другие ракетные комплексы. Она прошла успешно, а присутствовавший при этом Президент Академии наук СССР М.В. Келдыш, подводя итог, заявил, что это яркий пример комплексного, системного подхода к решению больших задач, обеспечивающий положительные результаты.
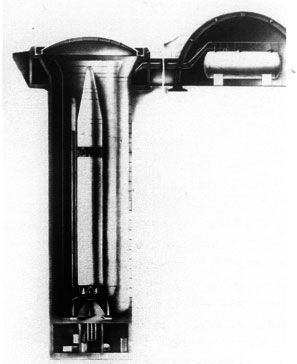
Для ракеты Р-9А необходимо было создать также шахтный вариант стартового комплекса. Никакого опыта по созданию такого комплекса ни в стране, ни за рубежом не имелось. В США для ракеты "Атлас" аналогичного класса предусматривалось только хранение ракеты в шахте, а для пуска ее поднимали на поверхность земли. Из шахты пускать боялись, так как подготовка и запуск двигателей были связаны с испарением жидкого кислорода и, следовательно, загазованностью шахты кислородом, что могло привести к взрыву. Нужно было время для исследований и экспериментов. Однако обстановка требовала ускоренного строительства защищенных стартовых комплексов Р-9А для обеспечения защиты стратегических ракет от возможного ядерного удара противника. Поэтому решили исследования и эксперименты проводить одновременно с проектированием и строительством экспериментального шахтного стартового комплекса на полигоне Байконур. Его головным разработчиком стало ГСКБ "Спецмаш" (главный конструктор В.П. Бармин).
Комплекс состоял из трех шахт, расположенных в одну линию, недалеко друг от друга, командного пункта, хранилищ компонентов топлив и сжатых газов. Все сооружения были заглублены и соединены между собой ходами сообщения. Автономное электропитание обеспечивалось дизель-электростанциями. Под пусковым столом, размещенным на глубине 25 м, располагались три этажа для заправочного оборудования. Внутри бетонного сооружения шахты размещался стальной стакан диаметром около 8 м. Зазор между шахтой и стаканом служил газоходом для струй двигателя ракеты при пуске. Ракета Р-9А, предназначенная для пуска из шахты, не имела переходной рамы из-за ненадобности, а желоб бортовых коммуникаций был доработан в связи с тем, что он не отбрасывался, как при наземном варианте, а после отстыковки от ракеты отводился к стенке стакана и фиксировался.
Шахтный стартовый комплекс для ракеты Р-9А, созданный на полигоне Байконур, получивший название "Десна-В", стал головным, на нем проверялись все расчетные данные и сама возможность пуска ракеты, заправленной кислородом и керосином из шахты. При пуске из шахты отрабатывались монтажная и эксплуатационная документации, технология строительства шахтных пусковых установок и т.д. Результатов пуска, подтверждающих в том числе и полученный опыт строительства, с нетерпением ждали на серийных объектах в ракетных войсках.
27 сентября 1963 года был проведен первый пуск ракеты Р-9А из шахты. Он прошел с положительными результатами: все системы сработали нормально. Это послужило отправной точкой для развертывания строительства серийных шахтных стартовых комплексов в различных районах страны, где работники ОКБ-1 принимали участие во введении их в строй. В разработке и испытаниях шахтного варианта ракеты Р-9А и ее наземного комплекса приняли участие работники ОКБ-1 М.С. Хомяков, А.П. Абрамов, Б.А. Дорофеев, К.И. Маркс, В.М. Караштин, B.C. Павлов, И.В. Попков, B.C. Овчинников, В.Н. Бодунков, Б.В. Фалеев, К.П. Симагин и др.
 | Март 1965 года. Группа сотрудников ОКБ-1, смежных организаций и полигона после пуска ракеты Р-9А со старта "Долина": А.Л. Морозов, И.А. Тимошенко, А.П. Июдин, А.А. Голубев, Б.А. Дорофеев, С.С. Крюков, А.С. Маслаков, А.С. Кириллов, В.С. Патрушев, Г.А. Тюлин, Ю.Л. Львов, В.А. Сахаров, С.П. Королев, М.И. Кузнецкий, А.Г. Захаров, М.С. Настенко, Я.И. Трегуб, М.С. Хомяков, К.Д. Бушуев, К.П. Феоктистов, В.П. Финогеев, В.И. Тексин, Б.И. Кузнеченков |
 | Группа сотрудников — разработчиков ракеты Р-9А около постамента ракеты у Музея Вооруженных Сил: В.М. Караштин, П.А.Ершов, В.В. Машков, Г.М. Марков, Ю.П.Ильин, А.И. Осташов, М.С. Хомяков, Г.А. Фадеев, Б.Е. Гуцков |
После проведения летно-конструкторских испытаний, закончившихся 2 февраля 1964 года 54-м пуском, ракета Р-9А с шахтным и наземным ("Долина") комплексами была принята на вооружение 21 июля 1965 года с индексом 8К75, а ее серийное производство в 1963 году передано на Куйбышевский завод "Прогресс".
Широким фронтом развернулись работы по изготовлению, монтажу, испытаниям и сдаче в эксплуатацию ракетным войскам серийных боевых стартовых комплексов с ракетой 8К75. И здесь ОКБ-1 играло ведущую роль. С.П. Королев придавал исключительное значение этой работе. На объекты для осуществления авторского надзора за монтажом направлялись бригады специалистов ОКБ-1 и завода, а заместителем главного конструктора по сдаче серийных боевых комплексов в эксплуатацию и постановке их на боевое дежурство был назначен Б.А. Дорофеев, имевший большой опыт испытаний на экспериментальном комплексе "Долина".
Пятнадцать лет на боевом дежурстве находились боевые ракетные комплексы с ракетой 8К75, получив высокую оценку в воинских частях. Таков итог работы ОКБ-1 и смежных организаций по этой теме. Это была победа технической мысли в борьбе за возможность применения в боевом ракетном комплексе жидкого кислорода, который К.Э. Циолковский и С.П. Королев считали ракетным компонентом с большим будущим.
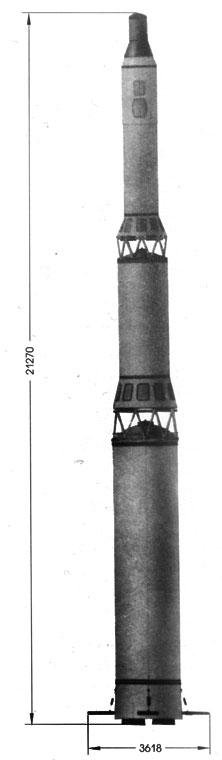
Глобальная ракета ГР-1
Работы по созданию ракеты нового типа — глобальной межконтинентальной баллистической ракеты ГР-1 — были начаты в ОКБ-1 в соответствии с Постановлением Правительства от 24 сентября 1962 года. Кроме обычных возможностей поражения целей при полете по баллистическим траекториям глобальная ракета позволяла поражать цель путем торможения головной части в заданный момент времени полета ракеты по круговой орбите ИСЗ. Теоретической базой боевого применения глобальной ракеты ГР-1 послужили следующие соображения.
Головные части БРДД длительное время считались неуязвимыми для средств противоракетной обороны противника. Однако вскоре были разработаны системы, которые, используя сам принцип баллистического полета ракеты (известный закон движения, максимальная высота траектории более 1000 км), давали возможность раннего обнаружения и точного прогнозирования траектории полета ГЧ, указывали координаты намеченной цели, обеспечивали достаточное время для обнаружения ГЧ и позволяли вести эффективную борьбу с ними.
 Трехступенчатая глобальная ракета ГР-1, способная поразить цель в любой точке Земли с любого направления |
Недостатком поражения конкретных целей с помощью глобальных ракет является меньшая точность выведения головной части на цель. Этот недостаток удалось в значительной мере преодолеть путем введения в состав головной части устройства, названного РДГЧ (регулятор движения головной части). Это устройство, увеличивающее аэродинамическое сопротивление ГЧ, позволяло повысить точность по дальности при перелете за счет отстрела РДГЧ в определенный момент после торможения при полете ГН по нисходящей траектории, рассчитываемый автоматической системой управления, и реализовать выполнение требований ТТТ.
Возможность стрельбы глобальными ракетами в прямом и противоположном направленных по отношению к цели требовала от противника создания круговых средств ПРО. Проведенные в ОКБ-1 в 1961-1964 гг. проектно-исследовательские работы показали возможность создания трехступенчатой глобальной ракеты на базе двигательных установок разрабатывавшейся ракеты 8К77 для I и II ступеней и двигателя 8Д726 (разработки ОКБ-1) с тягой 6,8 тс на III ступени ракеты.
Двигатель 8Д726 был выполнен по схеме с дожиганием газогенераторного газа в камере сгорания. Основной особенностью двигателя являлась возможность его запуска в космических условиях. При этом поджиг топлива в газогенераторе осуществлялся с помощью двух запальников, а в камере сгорания использовался эффект воспламенения керосина в горячем (≈350°С) газогенераторном газе. При разработке двигателя были использованы: пневмоклапаны запуска и выключения двигателя; бустерный ТНА окислителя, обеспечивающий ускоренное захолаживание магистрали кислорода и запуск основного ТНА при малом давлении в баке. Впервые в двигателе была использована камера сгорания с щелевой смесительной головкой, имеющей высокую расходонапряженность и устойчивость к высокочастотным колебаниям, что существенно повысило надежность двигателя.
Для повышения боевой готовности ракеты и сокращения времени подготовки двигателя к старту исключили все ручные операции, для чего в двигателе была обеспечена полная герметичность стыковых соединений, исключающая операцию "опрессовка", и использованы специальные сбрасываемые герметизирующие заглушки, исключающие операции "снятие заглушек",
Отработка двигателя 8Д726 была начата в 1963 году. После пройденного этапа экспериментальных и конструкторско-доводочных испытаний завод 88 изготовил 230 двигателей, на которых проведено около 500 испытаний.
Большой творческий вклад в разработку двигателя 8Д726 внесли Б.А. Соколов, Г.А. Бирюков, В.Г. Борздыко, М.М. Викторов, В.П. Житников, В.И. Ипатов, А.Ал. Морозов, А.Ан. Морозов, Э.В. Овечко-Филиппов, С.В. Романов, Ю.К. Семенов, Н.М. Синицин, С.Г. Ударов, А.С. Шелемин.
Ракета ГР-1 при стартовой массе 117 т и тяге ДУ на земле 147 тс могла нести заряд с тротиловым эквивалентом 2,2 Мт на неограниченную дальность и обеспечивать точность до ±5 км по дальности и до ±3 км по боковому отклонению, Эксплуатационные особенности трехступенчатой ракеты ГР-1 аналогичны таковым для ракеты Р-9А.
К 1962 году были созданы стендовые ракеты ГР-1, началась их наземная экспериментальная отработка, велось изготовление образцов для летных испытаний, два из которых неоднократно провозились по Красной площади во время военных парадов. Однако из-за трудностей с отработкой двигателя НК-9 в ОКБ-276 для I ступени ГР-1 в серию не пошли, хотя подобная ракета, правда, значительно позже была создана в КБ "Южное" (М.К. Янгель). Исполнителями проектно-исследовательских работ по глобальной ракете ГР-1, получившей войсковой индекс 8К713, были те же сотрудники ОКБ-1, что и по ракете Р-9.
 | Ракета ГР-1 на транспортировочной тележке |
Для ракеты ГР-1 можно было в принципе использовать те же стартовые позиции и наземное оборудование, что создавались для ракеты Р-9. Однако специально для ГР-1 создали стартовый комплекс с полной автоматизацией предстартовых операций на площадке 51, вблизи от стартовой площадки ракеты Р-7. Особенностью стартовой подготовки этой ракеты было то, что она комплектовалась контейнером, выполняющим функции транспортного контейнера, стартового стакана и служащим для прокладки заправочных и других коммуникаций связи верхних ступеней с наземным оборудованием.
Одновременно на базе ракеты ГР-1 велась разработка ракеты 8К513, предназначенной для уничтожения боевых спутников противника на их рабочих орбитах. Эта работа закончилась выпуском технического предложения, до производства таких ракет дело не дошло.
В 1964 году работы по ГР-1 и 8К513 были прекращены, исходя из принятых СССР международных обязательств по неиспользованию космического пространства для размещения в нем оружия.
 Первая твердотопливная ракета РТ-1 в полете Основные характеристики двигателей ракеты РТ-1
|
Постановлением от 27 июня 1959 года, принятым по предложению ГКОТ (К.Н. Руднев), предписывалось организовать филиал ОКБ-1 на базе ЦНИИ-58 для немедленного развертывания работ по разработке баллистических ракет на твердом топливе с дальностью полета 2500 км. Руководство филиалом ОКБ-1 возлагалось на С.П. Королева и К.Д. Бушуева.
Постановлением от 20 ноября 1959 года, принятым по предложению К.Н. Руднева, Р.Я. Малиновского, В.Д. Калмыкова, Е.П. Славского, Б.Е. Бутомы, B.C. Федорова, П.В. Дементьева, предусматривалось создание баллистической ракеты на твердом топливе РТ-1 с дальностью полета головной части 2500 км и разбросом по дальности ±5 км и по боковому направлению ±4 км. Ракета должна была иметь стартовую массу до 35 т и нести головную часть с массой боевого заряда 500 кг. Летные испытания ракеты РТ-1 должны были начаться с комбинированной системой управления в IV квартале 1960 года.
Одновременно ставилась задача по выполнению работ по теме РТ-2, которой предусматривалась разработка баллистической ракеты с дальностью полета головной части 10 000-12 000 км с разбросом по дальности и боковому направлению ±10 км. Головная часть ракеты должна была нести боевой заряд массой до 500 кг. Этим же постановлением на ОКБ-1 возлагалась работа в целом по комплексам РТ-1 и РТ-2, а в качестве соисполнителей по направлениям работ привлекались: КБ-11 (Е.А. Негин, С.Г.Качарянц), НИИ-125 (Б.П. Жуков, Ю.А. Победоносцев), НИИ-885 (М.С. Рязанский, Н.А. Пилюгин), НИИ-944 (В.И. Кузнецов), НИИ-627 (А.Г. Иосифьян, Н.С. Лидоренко), ОКБ-686 (A.M. Гольцман), НИИ-13 (Ф.И. Куприянов), НИИ-130 (A.M. Секалин), НИИ-137 (В.А. Костров) и ГСКБ (В.П. Бармин).
При проектировании ракеты РТ-1 выбрали РДТТ "пакетного" типа, состоящие из двигателей с диаметром пороховых шашек 800 мм (большие размеры шашек еще не освоили), с корпусами двигателей из стеклопластика. Сопла двигателей основных ДУ были неподвижными. Рулевые двигатели I и III ступеней были твердотопливными с вращающимися при помощи рулевых машин корпусами, отклоняющими сопла на угол до 45°. Управление II ступенью в полете осуществлялось с помощью складных воздушных рулей, которые устанавливались в рабочее положение после старта ракеты. Ракета получила индекс 8К95. Двигатели первых двух ступеней работали до полного выгорания топлива.
Управление дальностью полета ракеты осуществлялось системой управления путем выдачи команды на обнуление тяги двигателя последней ступени, для чего вскрывались с помощью пирозарядов узлы отсечки на верхнем днище РДТТ III ступени, которые создавали необходимую противотягу
Для уменьшения разброса импульса последействия выключение двигателя III ступени проводилось в два этапа: сначала вскрывались два узла отсечки из четырех, после чего двигатель переходил на пониженную тягу, а затем, с некоторой временной задержкой, два оставшихся узла отсечки выключали двигатель (обнуляли тягу) окончательно. После этого происходило отделение головной части, и она продолжала самостоятельный полет к цели по баллистической траектории. Такая схема обнуления РДТТ последней ступени оказалась очень удачной и используется с тех пор на всех отечественных твердотопливных ракетах средней и межконтинентальной дальности. Разделение ступеней было "горячим", т.е. последующая ступень ракеты запускалась при еще работающей предыдущей. Ступени соединялись ферменными конструкциями, команда на разделение ступеней выдавалась от датчика перегрузок. Для снижения массы III ступени предусматривался сброс ее хвостового отсека после отделения от II ступени, что обеспечивало некоторое увеличение дальности полета ГЧ массой 800 кг.
Результаты работ по созданию межконтинентальной баллистической ракеты с двигателями на твердом топливе нуждались в экспериментальной проверке и отработке ее агрегатов и систем. Для этих целей в порядке экспериментальной отработки ракеты РТ-1 были проведены: огневые испытания двигателей I, II и III ступеней (РДТТ блоков А, Б и В по 30-40 прожигов каждый), отработка отделения головной части на специальной установке, отработка отсеков двигательных установок, огневые испытания рулевых двигателей блоков А и В, прочностные испытания и макетирование ракеты, а также ее примерочные испытания на СК.
Кроме того, прошли огневые стендовые испытания всех трех ступеней ракеты РТ-1 на испытательном полигоне в районе г. Красноармейска Московской области. Для каждой ступени при их горизонтальном положении было проведено по три испытания. Дополнительно проводилась отработка системы обогрева зарядов РДТТ с проверкой ее работы на крайних режимах, отработка теплозащитных покрытий и графитовых вкладышей камер сгорания, уточнение аэродинамических характеристик ракет, а также системы управления полетом и эксплуатационных характеристик твердотопливных зарядов на стендах организаций-разработчиков.
Летные испытания ракеты РТ-1 начались с опозданием на один год и проводились с апреля 1962 по июнь 1963 года на ГЦП с падением головной части в районе озера Балхаш. Из первых девяти ракет только три выполнили свою задачу. Первый успешный пуск состоялся 18 марта 1963 года. Испытаниями ракеты РТ-1 на ГЦП руководила Государственная комиссия, председателем которой был начальник ГЦП генерал-полковник В.И. Вознюк, а техническое руководство от ОКБ-1 осуществляли И.Н. Садовский, Е.В. Шабаров и П.И. Дребезгов.
Учитывая новизну ракеты РТ-1, необходимость обеспечения безопасности боевых расчетов при ее подготовке к пуску, сохранности материальной части, было принято решение готовить ракету к пуску в два этапа. На первом этапе проводился весь объем работ на технической и стартовой позициях до снаряжения двигателя пороховыми зарядами (в случае каких-либо "нестыковок" или недоработок при отсутствии пороховых зарядов имелась возможность безопасного устранения замечаний), что позволяло боевым расчетам приобрести практический опыт работ с ракетой без какого-либо риска и страха. На втором этапе вторично проводился весь цикл проверок ракеты по штатной технологии, но уже со снаряженными двигателями и установленными пиропатронами.
Летные испытания ракеты РТ-1 позволили накопить опыт по натурной отработке ракет с двигателями на твердом топливе и дали возможность уточнить ряд технических характеристик перспективных ракет с РДТТ. В то же время стало ясно, что в силу своего конструктивного несовершенства ракета РТ-1 не будет рекомендована для принятия на вооружение Советской Армии. Однако с точки зрения накопления опыта по проектированию, разработке технологических процессов и летной отработке отечественных ракет с РДТТ это был очень важный этап.
Основные недостатки ракеты РТ-1 были связаны с отсутствием зарядов твердых топлив с требуемыми конструктивными и технологическими характеристиками (габаритами, пластичностью, высокой энергетической эффективностью), с необходимостью размещения готового топливного заряда в корпусе двигателя, а не с его заливкой в корпус и др. Поэтому наряду с работами по ракете РТ-1 велись поиски вариантов ракеты РТ-2. Постановлением от 4 апреля 1961 года вносятся уточнения в требования к ракете РТ-2, в том числе по головной части. Постановлением от 29 июня 1962 года вновь уточняются тактико-технические требования к ракете РТ-2 и сроки работ. При согласовании тактико-технических требований Министерства обороны на эту ракету проводились уточнения и дополнения, связанные с возможностью применения на ней двух типов ГЧ с более легкими боевыми зарядами и различными тротиловыми эквивалентами, с ужесточением требований к кучности стрельбы и времени боевой готовности, с разработкой автоматизированного старта и т.п. Постановление от 16 июля 1963 года эти требования узаконило.
Эскизный проект на ракету РТ-2 был разработан в 1963 году, В целях экспериментальной отработки отдельных элементов и систем перспективной межконтинентальной баллистической ракеты с РДТТ типа РТ-2 спроектировали и испытали с использованием наземного старта вариант ракеты РТ-1-1963 (8К95-1963), в котором на III ступени устанавливался разработанный к тому времени моноблочный четырехсопловый двигатель — прототип двигателя III ступени межконтинентальной ракеты РТ-2 с улучшенными летно-техническими и эксплуатационными характеристиками. Были изготовлены три ракеты РТ-1-1963. Подготовка их к пуску и пуски проводились на ГЦП, на технической и стартовой позициях ракет РТ-1 с соответствующими доработками.
 Первая стратегическая межконтинентальная твердотопливная ракета РТ-2 Основные характеристики ракеты РТ-2П
|
На ракете РТ-2 предусматривалось применение головной части массой 500 кг на дальность 10 000-12 000 км и головной части массой 1400 кг на дальность 4000-5000 км. Старт ракеты должен был проводиться из защищенной шахты, готовность к пуску составлять 3-5 мин.
Ракета РТ-2 получила индекс 8К98. Предусматривалась возможность путем комбинации ступеней ракеты РТ-2 создать ракеты на промежуточные дальности (II и III ступени ракеты образовали ракету 8К96, I и III ступени — ракету 8К97). Ведущими конструкторами по ракете РТ-2 в разное время были С.Е. Барденштейн, Ф.А. Титов. Ракета 8К96 была в последующем доведена до сдачи заказчику Ленинградским КБ завода "Арсенал" (П.А. Тюрин).
Все параметры ракеты РТ-2 (распределение топлива между ступенями, диаметр двигателей, время их работы, давление в камерах сгорания и на срезе сопел и др.) были выбраны близкими к оптимальным (допускались отклонения на 1-2% от оптимальных, исходя из условий эксплуатации ступеней, простоты конструкций и удобства эксплуатации). И все же ракета РТ-2 требовала дальнейшего совершенствования. Так, смесевое топливо формовалось в отдельных пресс-формах, затем заряд вкладывался в корпус, а зазор между зарядом и корпусом заливался связующим веществом. Это создавало определенные трудности при изготовлении РДТТ ракеты и требовало новых конструкторских и технологических решений, которые исключили бы сложности при разработке последующих модификаций ракеты РТ-2.
Одна из них — ракета РТ-2П — имела твердое топливо ПАЛ-17/7 на основе бутилкаучука, обладающего высокой пластичностью, не имеющего заметного старения и растрескивания в процессе хранения, при этом топливо заливалось прямо в корпус двигателя, затем производились его полимеризация и формование необходимых поверхностей горения заряда. Корпус III ступени ракеты РТ-2П изготавливался двухслойным: высокопрочная стальная рубашка упрочнялась стеклопластиковыми нитями, наматываемыми снаружи.
Были разработаны специальные средства, исключающие несанкционированный запуск двигателей на старте, и увеличены гарантийные сроки хранения РДТТ, что существенно повысило качество ракеты РТ-2 и продлило сроки ее эксплуатации. Для управления использовались поворотные сопла основных двигателей ступеней.
Параллельно велась разработка комплекса наземного оборудования. На первом этапе для обеспечения летно-конструкторских испытаний ракеты РТ-1 был создан комплекс средств наземного оборудования, в котором, в основном, использовались существующие сооружения ГЦП и агрегаты и системы, разработанные ранее для ракет Р-5М, Р-7, Р-9.
Для обеспечения ЛКИ ракеты РТ-1-1963 с моноблочным РДТТ на III ступени был спроектирован, впервые изготовлен и испытан при пусках транспортно-пусковой контейнер СМ-162. Его разработка была вызвана тем, что для ракеты следующего поколения 8К98 выбрали стартовое сооружение шахтного типа с пуском ракеты из глухого стакана (так называемый "минометный" старт), при котором выход ракеты РТ-2 из шахты обеспечивался за счет тяги собственных двигателей и поршневого эффекта, создаваемого в подракетном пространстве стакана с помощью поддона, крепящегося к нижнему шпангоуту хвостового отсека I ступени, и бандажа на переднем фланце ДУ I ступени. Для уменьшения температурного воздействия на корпус ракеты на дно пускового стакана наливалось некоторое количество воды, а поддон и состоящий из нескольких частей бандаж обеспечивали замкнутость пространства между ракетой и стаканом при движении ракеты по стакану, одновременно исключая воздействие ракетных струй двигателя I ступени на корпус ракеты.
При выходе ракеты из стакана бандаж сбрасывался, разделяясь пружинными толкателями на несколько частей. Поддон отделялся по команде от CУ примерно на 2-й секунде полета. Усилия пружинных толкателей и время отделения исключали возможность падения поддона на оборудование пусковой установки.
С помощью установленной на внутренней стенке стакана шпонки и соответствующих пазов в поддоне и бандаже исключалась также "закрутка" ракеты при движении ее по пусковому стакану. Минометный старт существенно сокращал размеры шахтных пусковых установок, значительно удешевлял строительство и снижал их уязвимость. Выбор шахтного пускового устройства обусловливался также тем, что по сравнению с наземными открытыми стартами шахтные пусковые установки давали возможность обеспечить любую заранее заданную степень защиты ракеты в шахте от ядерного воздействия вероятного противника.
Для доставки блоков твердотопливных ракет с завода на техническую позицию были разработаны и изготовлены специальные изотермические железнодорожные вагоны. Блоки ракеты доставлялись с технической позиции до ШПУ и затем загружались в шахту с помощью полуприцепной транспортно-загрузочной машины, специально разработанной для этих целей, а активный привод на колесах полуприцепа (так называемое "мотор — колесо") позволял ему передвигаться по дорогам любых категорий.
Для транспортировки и работ с головной частью была разработана изотермическая стыковочная машина с манипулятором для пристыковки — отстыковки головной части к ракете. Конструкция всех транспортных агрегатов и агрегатов технической позиции позволяла проводить все погрузочно-разгрузочные работы и работы по установке ракеты РТ-2 в ШПУ без применения кранового оборудования, что значительно упрощало весь цикл работ с ракетой.
Для разработки агрегатов наземного комплекса ракеты 8К98 были привлечены КБ "Мотор" (В.А. Рождов), ЦКБ-34 (В.В. Чернецкий) и Ленинградский филиал ЦПИ-20 (Г.П. Ливенков). Работами по созданию наземного комплекса ракеты 8К98 в ОКБ-1 руководил А.П. Абрамов.
Программой ЛКИ ракеты РТ-2 предусматривалось проведение 32 пусков ракет: семь пусков планировались с ГЦП в Капустином Яре и 25 пусков — с полигона в районе Плесецка Архангельской области.
Пуски ракет РТ-2 с ГЦП проводились в феврале-июле 1966 года в район озера Балхаш из приспособленной шахты, ранее созданной для одной из ракет главного конструктора М.К. Янгеля. Из семи ракет шесть свою задачу выполнили. Первый успешный пуск ракеты РТ-2 состоялся 26 февраля 1966 года.
Для отработки и проверки динамики выхода ракеты РТ-2 из шахты был разработан имитатор ракетного снаряда, выбрасывавший макет I ступени ракеты РТ-2 из шахты. Поскольку ракета РТ-2 доставлялась на ГЦП уже в снаряженном состоянии, то для отработки испытательного и пускового оборудования, отработки эксплуатационной документации был спроектирован и изготовлен электрический эквивалент борта ракеты, что в значительной степени повысило безопасность работ и позволило боевым расчетам приобрести необходимую практику работы со снаряженной ракетой.
Пуски ракет РТ-2 с полигона Плесецк проводились с 4 ноября 1966 года по 3 октября 1968 года из ШПУ. Из 25 ракет 21 была запущена на промежуточную дальность (район падения головных частей "Кура" — пос. Ключи, полуостров Камчатка), четыре — в акваторию Тихого океана, на максимальную дальность. Последние три ракеты запускались залпом. Из 25 пусков 16 прошли успешно.
18 декабря 1968 года ракета РТ-2 была принята на вооружение Советской Армии под индексом 8К98. Тогда же началось развертывание позиционных районов с ШПУ, оснащенных ракетами 8К98, в одном из центральных районов России. Отдельный боевой ракетный комплекс, вооруженный ракетами 8К98, занимал позиционный район и состоял из 10 ШПУ и одного командного пункта.
На пусковых установках в процессе боевого дежурства персонал не находился. Управление пуском ракет из каждой ШПУ осуществлялось с КП с помощью системы дистанционного управления и контроля по кабельным линиям, причем для надежности передачи команд на пуск кабельными линиями соединялись также отдельные ШПУ между собой, образуя кольцо (радиально-кольцевая схема СДУК). Такая организация боевых ракетных комплексов позволяла поддерживать их высокую боевую готовность и обеспечивала надежное прохождение команд на пуск ракет даже при повреждении отдельных каналов СДУК.
Как вариант боевого использования ракет 8К98 был разработан эскизный проект подвижного железнодорожного БРК. Он представлял собой железнодорожный состав, в который входили четыре стартовых вагона ракет 8К98, вагон с дизель-электростанцией, два вагона с аппаратурой подготовки и пуска ракет, вагон — командный пункт, а также вагон — столовая и вагоны для размещения личного состава БРК. Старт ракеты предполагался из нерасцепляемого железнодорожного состава с любого участка пути, хотя многое определялось качеством грунта на выбранном участке старта. Крыша стартового вагона сдвигалась, ракета в вагоне размещалась на стреле установщика, которым перед стартом она и приводилась в вертикальное положение. Однако работы по железнодорожному варианту в то время не получили дальнейшего развития и были продолжены вновь применительно к подвижному ракетному комплексу на базе новых мощных ракет с РДТТ.
Необходимо отметить, что отработка режима боевого дежурства ракетного комплекса РТ-2 (10 ШПУ и один КП) началась в 1967 году на полигоне Плесецк первоначально по схеме "один КП и три ШПУ" (остальные семь ШПУ были введены в строй позднее). Отработка режима боевого дежурства проходила с большими трудностями: практически каждый день, а иногда и несколько раз в сутки комплекс снимался с боевого дежурства из-за неспособности СДУК работать при тех параметрах электропитания, которые обеспечивала государственная сеть электроснабжения (особенно мешали динамические режимы при скачках напряжения). Причем режим перехода электропитания с линии электропередачи на аккумуляторы шахтной пусковой установки, а затем на дизель-электростанцию не обеспечивал бесперебойности электропитания оборудования пусковой установки (перерыв составлял 0,1-0,6 с). В результате этого многие системы, расположенные в ШПУ (система прицеливания, СДУК, блок местной автоматики, обеспечивающий сопряжение СДУК с бортовыми системами ракеты РТ-2 и системами ШПУ), переходили на резервный канал, а их последующий возврат на основной канал дистанционно с КП в то время был невозможен. В этих случаях приходилось направлять к ШПУ (за 10-12 км) несколько автомобилей-"кунгов" со специальным оборудованием для приведения всех систем шахтной пусковой установки в исходное состояние. Для исключения этих недостатков и отработки режима боевого дежурства в 1967 году на полигон Плесецк была командирована специальная бригада специалистов ЦКБЭМ и смежников под техническим руководством В.М, Караштина и ведущего конструктора В.К. Ходича.
Проведенный анализ недостатков работы систем в режиме боевого дежурства позволил разработать технические мероприятия и провести доработку ряда систем ШПУ и КП. После этого режим боевого дежурства стал устойчивым, и последующее подключение семи шахтных пусковых установок к КП подтвердило правильность принятых технических решений.
В эти работы большой вклад внесли также В.П. Хорунов, Л.Б. Шульман, Т.М. Фадеев, Л.Г.Струля, Е.С. Марамзин, Б.И.Карманов и М.П. Гераскина, а также представители заказчика С.М. Кравченко, А.Г. Чернов и Д.И. Крюков.
С октября 1968 года с полигона Плесецк стали проводиться отстрелы от партий ракет РТ-2 (установочная партия, контрольные пуски от партии ракет, пуски ракет после длительного хранения, после истечения гарантийного срока эксплуатации и снятия с боевого дежурства, по плану боевой подготовки). В 1979 году был проведен сотый пуск ракеты РТ-2 и ее модификации — ракеты РТ-2П.
Испытания на сохранность и работоспособность систем и агрегатов ракеты РТ-2 и наземного оборудования после длительного нахождения на боевом дежурстве проводились на полигоне Плесецк в процессе экспериментально-боевого дежурства БРК из семи пусковых установок в штатном исполнении в условиях, максимально приближенных к реальным условиям эксплуатации (ежегодных регламентов), боевого дежурства и пусков. По результатам этих испытаний принимались решения о возможности продления гарантийных сроков работы оборудования стартовой позиции и самой ракеты, оценивалась стабильность основных параметров БРК, расход ресурса приборов и агрегатов и его достаточность для проведения пусков.
Техническими руководителями работ по пускам ракет РТ-2 от ЦКБЭМ были И.Н.Садовский, Я.И. Трегуб, а председателями Государственных комиссий по ЛКИ ракеты РТ-2 на полигоне в Плесецке — генерал-полковник П.В.Родинов, затем генерал-лейтенанты А.А. Васильев и Г.Е. Алпаидзе.
С января 1970 года по март 1971 года на полигоне Плесецк были проведены летные испытания модернизированной ракеты РТ-2П. Ракета имела комплекс средств радиотехнической защиты ГЧ от средств противоракетной обороны противника, более мощную ГЧ, на III ступени был применен новый двигатель и улучшенное по энергетике топливо. Серьезной модификации подверглась СДУК, был увеличен диапазон азимута прицеливания с ±45 до ±120°, введены дистанционное перенацеливание и закладка в память СУ двух полетных заданий. Всего провели 15 пусков РТ-2П, из которых два оказались неудачными. 12 пусков были проведены в район падения "Кура" (полуостров Камчатка) и три — в акваторию Тихого океана.
После устранения выявленных при пусках ракеты РТ-2П недостатков в 1972 году она была принята на вооружение Советской Армии с индексом 8К98П вместе с комплексом наземного оборудования, боевой эксплуатационной и эксплуатационно-технической документацией.
С декабря 1974 года по декабрь 1975 года было проведено пять пусков установочной партии ракет РТ-2П, все пуски прошли успешно. Ракетный комплекс в составе трех пусковых установок с ракетами РТ-2П и командный пункт были испытаны на длительное хранение в течение 7 лет (1976-1983 гг.) на полигоне Плесецк. При этом регламентные работы с ракетой РТ-2П, системами ПУ и КП проводились сначала через год, а с 1977 года — через два года. Результаты комплексных испытаний подтвердили, что все системы пусковых установок и командного пункта сохранили свою работоспособность после семи лет экспериментального дежурства (после 15 лет эксплуатации с момента ввода в строй).
В разработке технической документации, экспериментальной отработке и проведении натурных испытаний ракет РТ-1, РТ-1-1963, РТ-2 и РТ-2П принимало участие большое количество специалистов из различных подразделений ОКБ-1 (с 1966 года — ЦКБЭМ), в том числе И.Н. Садовский, П.Ф. Красовский, Е.А. Дубинский, П.П. Ермолаев, В.С. Павлов, Л.А. Музуров, Н.И. Чуканов, П.В. Жуков, И.С. Грибань, Б.Б. Голышев, А.Г. Рапп, О.Н. Воропаев, А.А. Заруденский, А.И. Кантер, Л.П. Перов и др., а также коллективы отделов 4 (Э.И. Корженевский), 23 (А.Г. Донской) и 24 (А.А. Смердов).
В ходе работ по ракетам с РДТТ специалистами ОКБ-1 совместно со специалистами предприятий-смежников было решено много теоретических и технических проблем по баллистике, аэрогазодинамике, теплообмену, термодинамике и теплофизике, гидравлике и гидродинамике, статическим и динамическим нагрузкам, условиям эксплуатации и полета, прочностям, материаловедению и технологии производства, созданию принципиально новых образцов рулевых машин и др.
Это была одна из самых удачных разработок ОКБ-1, существенно повлиявшая на поддержание паритета в ракетно-ядерном "соревновании" с нашими вероятными противниками и укрепившая безопасность нашей страны на одном из драматичных этапов ее истории.
После окончания летно-конструкторских испытаний ракеты РТ-2 и принятия ее на вооружение были развернуты боевые ракетные комплексы с ШПУ 15П098 и организовано их боевое дежурство.
Комплекс 15П098П сняли с вооружения в связи с окончанием гарантийного срока на ракеты 8К98П (15 лет) и наземное оборудование (20 лет). Он был одним из самых совершенных ракетных комплексов, когда-либо стоявших на вооружении Ракетных войск стратегического назначения.
 Разработчики ракет на твердом топливе из отдела А.А. Смердова: сидят Н.И. Басманов, П.П. Ермолаев, Г.Р.Доний, Г.А. Горбачев, А.А. Смердов, Г.Д. Суховой, Д.П. Крутов, А.Г. Донской, Е.И. Воронин, В.В. Калиновский, А.Н. Борисов; стоят А.О. Кантер, Ю.В. Сунгуров, И.П. Солдатов, А.Г. Рапп, H.C. Черноусова, В.И. Гуров, В.Н. Миронов, Н.И. Федоров, И.Д. Коротаев, И.В. Романов, А.А. Линьков, Г.П. Минашин, А.Е. Селенин, В.А. Солодилов, Г.В. Буданов, В.Б. Студитская, В.И. Проскурина, Т.И. Евсеева, В.И. Елисеева, Е.К. Глыбовский, А.И. Васильева, Н.К. Минаева, Г.П. Никифорова, С.Н. Шнякин, З.Н. Марушкина, В.Д. Попков, Е.А. Дубинский  Группа разработчиков сопловых блоков ракетных двигателей твердого топлива и двигателей отделения ступеней ракет-носителей: З.B. Егорова, В.А. Мироедов, А.Г. Рапп, Е.И. Опалева, Г.К. Залетаева, Г.Б.Абрамович, Е.И. Ерашова |
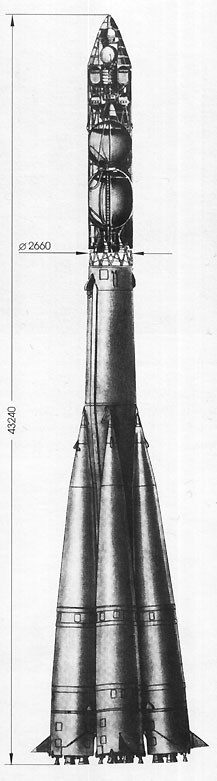 Четырехступенчатая ракета-носитель 8К78 "Молния" (ракета Р-7+блок И+блок Л с полезным грузом) |
С.П. Королев, являясь продолжателем учения К.Э. Циолковского, стремился претворить в жизнь его идеи об освоении человеком космического пространства, начиная с Луны и ближайших планет Солнечной системы. Исследование космического пространства с помощью автоматических аппаратов позволило бы получить более точные физические характеристики межпланетного пространства, а также планет Марс и Венера. Более достоверное и точное знание этих характеристик было необходимо для разработки межпланетных пилотируемых кораблей. Кроме того, конструкция и системы автоматических аппаратов должны были стать прототипами для будущих пилотируемых кораблей.
Перспектива создания на базе ракеты Р-7 многоступенчатого носителя космических аппаратов открывала новые возможности для исследования Луны и ближайших планет Солнечной системы — Венеры и Марса.
На основании проектных проработок С.П. Королев совместно с М.В. Келдышем после обсуждения этих проблем на Совете главных конструкторов внесли в Правительство соответствующие предложения. Предложения были поддержаны, и Постановлением от 10 декабря 1959 года "О развитии исследования космического пространства" положено начало созданию космической ракеты для полета к другим планетам (Марсу, Венере), определены головные организации, утвержден межведомственный научно-технический совет в составе М.В. Келдыша (председатель), С.П. Королева, А.А. Благонравова, К.Д. Бушуева (заместители), В.П. Глушко, М.С. Рязанского, Н.А. Пилюгина, М.К. Янгеля, Г.А. Тюлина, В.П. Бармина и других и назначен срок выпуска эскизного проекта по аппаратам для полета на Марс и Венеру — февраль 1960 года. В дальнейшем эти космические аппараты получили название автоматических межпланетных станций (АМС).
Постановление от 4 июня 1960 года "О плане освоения космического пространства" предписывало создать четырехступенчатую ракету-носитель для полета на Марс и Венеру, в августе — сентябре 1960 года запустить ее к Марсу и осуществить подготовку РН для полета к Венере в оптимальные астрономические сроки.
Работы по созданию автоматических аппаратов начались в отделе 9 (сектор Г.Ю. Максимова) с расчетов траекторий полетов к Марсу и Венере. В течение декабря 1959 и января 1960 года были проведены предварительные компоновочные работы, расчеты и завязки основных систем станций: систем терморегулирования и ориентации, радиосистемы, систем управления, телеметрии, фототелевизионной установки, научной аппаратуры для исследований межпланетного пространства, космического излучения, магнитных полей, корпускулярных частиц, тяжелых ядер, исследование атмосферы и поверхности планет и характерных признаков жизни на планетах.
28 февраля 1960 года С.П. Королев утвердил график разработки, выпуска рабочих чертежей, изготовления, экспериментальной отработки, комплексных электрических испытаний на заводе, подготовки на технической позиции и осуществления пуска автоматических межпланетных станций для исследования планеты Марс. Первой автоматической межпланетной станции был присвоен индекс 1М.
По этому графику предусматривалось в середине марта выпустить проектную документацию, выдать технические задания смежным организациям, все исходные данные — конструкторским отделам; в апреле подготовить рабочие чертежи на штатные и экспериментальные образцы станций и на приборы собственного изготовления; в конце июня изготовить первые объекты для отработки разделения, статических и тепловых испытаний; в середине июня поставить на контрольно-испытательную станцию первый аппарат для комплексных электрических испытаний, а в середине августа — отправить испытанные аппараты (станции) на полигон НИИП-5 для подготовки их запуска в конце сентября — начале октября 1960 года (в соответствии с оптимальной астрономической датой пуска).
Специально для запуска этих станций на базе ракеты Р-7 была разработана, изготовлена и испытана в стендовых условиях новая четырехступенчатая ракета-носитель 8К78. В качестве III ступени (блока И) использовали (с доработкой) II ступень ракеты Р-9 с двигателем КБХА (главный конструктор С.А. Косберг), а IV ступени — блок Л, разработанный ОКБ-1, на котором был впервые применен ЖРД замкнутой схемы С1.5400, также разработанный ОКБ-1. Первый отечественный ЖРД с дожиганием газогенераторного газа в камере сгорания позволил при применении освоенных компонентов топлива получить более высокий (340 кгс·с/кг) удельный импульс тяги в пустоте, чем у всех существовавших в то время двигателей.
При создании ЖРД с дожиганием впервые были разработаны: пневмогидравлическая схема двигателя, обеспечивающая его надежное включение в условиях космического пространства после длительного пребывания в состоянии невесомости; газогенератор, который при минимальных массе и габаритах обеспечивает переход жидкого кислорода в газообразный с температурой 350-400°С при равномерном поле температур путем сжигания в кислороде небольшого количества керосина; турбонасосный агрегат с центростремительной турбиной, работающей на окислительном газогенераторном газе с высоким противодавлением; надежно охлаждаемая камера сгорания с высокой степенью расширения газа в сопле, устойчиво работающая на окислительном газогенераторном газе с температурой 300-350°С и керосине; специальная пиротехническая арматура; пороховой стартер, обеспечивающий первоначальную раскрутку вала ТНА при запуске двигателя, и поворотные рулевые сопла для управления по крену, работающие на восстановительном газогенераторном газе и имеющие малый момент трения. При создании турбонасосного агрегата приняты меры, исключающие возгорание турбины и газового тракта в газообразном кислороде с высокой температурой ≈700°С.
 | Главный конструктор С.П. Королев и президент Академии наук СССР М.В. Келдыш |
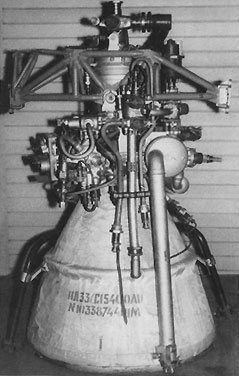 Первый в мире жидкостный ракетный двигатель замкнутой схемы с тягой около 7 тс, разработанный в ОКБ-1 |
При разработке блока Л исходили из того, что запуск его ДУ должен обеспечиваться в условиях невесомости через 1,5 ч полета по орбите вокруг Земли, а не непосредственно после окончания работы III ступени. Поэтому на блоке Л требовалось установить систему стабилизации и ориентации на время паузы и блок обеспечения запуска двигателя в невесомости, Таким образом, в состав IV ступени входили блок Л, СОИС, БОЗ, отделяемый космический аппарат, головной обтекатель, по форме аналогичный обтекателю корабля "Восток", а также два пороховых ускорителя для создания осевой перегрузки. На блоке Л устанавливалась система управления блоками И и Л, разрабатываемая НИИ-885 (Н.А. Пилюгин).
Блок Л состоял из топливного отсека, однокамерного двигателя в карданном подвесе и ферменного отсека. В связи с тем, что блок Л подвергался в полете длительному воздействию солнечной радиации, топливные баки имели специальную теплоизоляцию. Специальные сильфоны позволяли двигателю отклоняться до 3° для управления по тангажу и рысканию. Для управления по крену имелись два сопла тягой по 10 кгс, способные отклоняться на угол до 45°, работающие от дополнительного газогенератора, газ из которого одновременно подается для наддува баков окислителя и горючего. Задержки при изготовлении, трудности при подготовке блока к стендовым испытаниям привели к тому, что заключение по результатам огневых испытаний было получено лишь в начале октября 1960 года. Положительные результаты стендовых испытаний блока Л позволили перейти к конкретной подготовке ракетно-космического комплекса для осуществления старта автоматической межпланетной станции 1М в сторону Марса.
Разработка блоков И и Л осуществлялась под руководством С.С. Крюкова, П.И. Ермолаева и Я.П. Коляко. В ней принимали участие: А.А. Аксенцов, И.Н. Белянин, Б.П. Болгов, Э.Н. Бутузов, О.Н. Воропаев, В.Г. Высоцкий, Е.Л. Горбенко, П.А. Ершов, В.Ф. Ефремов, В.П. Кураев, В.Н. Лакеев, И.Л. Минюк, Ю.А. Михеев, А.И. Нечаев, В.Д. Осипов, С.Ф. Пармузин, В.С. Патрушев, В.И. Решетов, А.А. Ржанов, Б.А. Родионов, А.А. Рябов, Н.А. Сиулин, Б.П. Сотсков, В.М. Удоденко, И.П. Фирсов, А.П. Фролов, Е.П. Фролов, В.С. Фоняев, В.Г. Хаспеков, П.Ф. Шульгин, А.С. Кашо (ведущий конструктор). Разработка двигательной установки и ЖРД проводилась под руководством М.В. Мельникова. В работе участвовали В.М. Протопопов, Н.Н. Тупицин, Н.А. Задумин, И.И. Райков, Б.А. Соколов, В.Г. Борздыко, Г.Г. Подобедов и др.
Особенности условий межпланетных полетов автоматических станций к Марсу и Венере и проведение исследований при пролете на близком расстоянии от планет и особенно обеспечение посадки спускаемых аппаратов на поверхность планет потребовали от разработчиков создания новых сложных систем и специальных элементов конструкции. Впервые были разработаны радиосистемы дальней космической связи (до 300 млн. километров), система управления с солнечно-звездной прецизионной ориентацией и система посадки на поверхности Марса и Венеры. Для обеспечения необходимых точностей ориентации (до нескольких угловых минут) было принято решение установить оптические датчики, гироскопы и двигательную установку на единой жесткой плите, вваренной в гермокорпус орбитального отсека.
 | С.С. Крюков и Я.П. Коляко — непосредственные руководители проектных работ по первым ракетам-носителям |
Учитывая сложность систем и конструкции, а также длительные сроки полета (1-2 года), был запланирован большой объем экспериментальной отработки. Программа экспериментальной отработки предусматривала проверку теплового режима станции и испытания системы терморегулирования, прочностные испытания на статические и динамические нагрузки, комплексные электрические испытания систем, проверку механизмов раскрытия антенн и солнечных батарей.
 Транспортировка четырехступенчатой ракеты-носителя с автоматической межпланетной станцией  Установка четырехступенчатой ракеты-носителя с автоматической межпланетной станцией на стартовое устройство  АМС для исследования планеты Венера (1ВА) "Венера-1" |
Атмосфера Марса и Венеры резко отличается от земной, и отработка парашютов для спуска в ней должна была проводиться на недоступных для самолетов высотах и режимах. С этой целью в ОКБ-1 создается экспериментальный ракетный комплекс Р11А-МВ, выводивший макет СА на высоту около 50 км. В серии пусков ракет Р11А-МВ были отработаны трехкаскадная (два тормозных купола) парашютная система для спуска в плотной атмосфере Венеры и двухкаскадная система — для разреженной атмосферы Марса.
Активное участие в организации и проведении этих работ принимали В.Ф. Рощин, А.Г. Решетин, В.А. Тимченко, Л.А. Волгин, Е.М. Коськин.
Для подготовки АМС и ракет-носителей к пуску использовались технические и стартовые комплексы ракеты Р-7. В монтажно-испытательном корпусе технического комплекса было развернуто испытательное место для проверок и испытаний станций, а на стартовом комплексе установлено проверочное оборудование для их окончательной проверки.
Наземные комплексные электрические испытания АМС продвигались очень тяжело, так как не удавалось пройти всю программу работы станции в условиях полигона, начиная с отделения от РН до фотографирования и передачи изображения планеты на Землю. Радиоблок в комплексе со всеми системами (на тот период весьма сложный) не обеспечивал работу АМС: выходили из строя передатчики, приемники, счетно-решающая часть и т.д. К концу сентября 1960 года все-таки удалось пройти участок до планеты, однако первая же работа с фототелевизионным устройством привела к серьезной аварии внутри станции, на устранение которой потребовалось два дня. Оптимальная астрономическая дата (20-25 сентября 1960 года) давно уже прошла, приближалась дата критического резерва, после которой необходимо было уменьшать полезную массу для обеспечения вывода станции в заданную точку пространства. Поэтому приняли решение снять ФТУ. Из-за недостатка времени проверку герметичности в барокамере решили не проводить. Была выделена группа специалистов, отвечавших за окончательную сборку станции.
8 октября 1960 года полностью собранный ракетно-космический комплекс установили в стартовую систему. Старт первой ракетно-космической системы с АМС на борту для исследования Марса был осуществлен 10 октября 1960 года. I и II ступени проработали нормально, при работе III ступени из-за повреждения движка потенциометра в командной цепи гирогоризонта прошло аварийное выключение ДУ. Второй запуск АМС в сторону Марса был проведен 14 октября 1960 года. Эта станция так же, как и первая, не достигла планеты из-за незапуска ДУ III ступени (негерметичность разделительного клапана и, как следствие, замерзание горючего в трубопроводе подачи его в ТНА).
В сентябре 1960 года С.П. Королев вместе с присутствовавшими на полигоне специалистами приступил к анализу разработанной станции 1М и проработкам автоматической станции для полета к планете Венера. Астрономический срок старта находился между 15 января и 15 февраля 1961 года. Разработка АМС для полета к Венере проводилась в течение второй половины 1960 года в соответствии с графиком, утвержденным С.П. Королевым 8 мая 1960 года.
К сентябрю 1960 года выпустили рабочие чертежи по станции 1В. Однако было ясно, что станцию с доставкой спускаемого аппарата в виде "телевизионной трубки" на поверхность Венеры в оставшиеся сроки создать невозможно.
Поэтому на полигоне приняли решение об изготовлении АМС для полета к Венере на основе проектных параметров станции 1М. Основной объем отработки заимствовался со станции 1М. 1 января 1961 года станцию, которая получила индекс 1ВА, в отличие от ранее разрабатываемой станции 1В с посадкой на поверхность Венеры, отправили на полигон. Первый в мире старт к планете Венера был осуществлен 4 февраля 1961 года, III ступень отработала нормально, однако блок Л не запустился.
Следующий пуск АМС 1ВА состоялся 12 февраля 1961 года. Все системы ракеты-носителя сработали нормально. На орбиту вышла АМС с разгонным блоком Л, обогнула Землю и над Экваториальной Африкой впервые в мире стартовала в сторону Венеры. Эта станция получила название "Венера-1".
В самом начале полета (после отделения) на станции в связи с нарушениями в работе системы терморегулирования возникли отклонения в работе системы ориентации, поэтому все сеансы связи проводились через всенаправленную антенну. Станция отвечала на команды до 22 февраля 1961 года, после чего получить сигналы не удалось. Станция перестала существовать как объект исследования, однако положительным в этом эксперименте было то, что впервые в мире была осуществлена двусторонняя связь с АМС, удаленной от Земли на 1 400 000 км.
После этой неудачи приняли решение совместно с Академией наук СССР провести подробный и тщательный анализ основных параметров станции и ее систем и приступить к разработке станции с более надежными системами. Было решено приступить к разработке унифицированной межпланетной станции для полета к Марсу и Венере в целях исследования межпланетного пространства, планет в пролетном варианте с помощью фотографирования и радиозондирования с небольших расстояний, а также с помощью доставки на поверхность планет спускаемых аппаратов с радиосистемой и научными приборами.
Решение о разработке унифицированной станции принято С.П. Королевым в начале февраля 1961 года на полигоне при подготовке к пуску станций 1В и 1ВА.
К 30 июля 1961 года были подготовлены исходные данные для разработки станции типа 2МВ, а к началу 1962 года разработаны рабочие чертежи станций 2МВ-1 (для посадки на Венеру), 2МВ-2 (для пролета около Венеры), 2МВ-3 (для посадки на Марс), 2МВ-4 (для пролета около Марса) и направлены на завод. Кроме изучения Марса и Венеры эти станции предназначались и для использования их в качестве зондов.
Предполагалось разрабатывать все модификации с максимальной унификацией бортовых систем станций, их узлов и деталей. Каждая из станций состояла из основного (орбитального) отсека (в нем располагались основные системы, обеспечивающие терморегулирование, ориентацию и коррекцию, радиосвязь, энергопитание, приборы для научных исследований по траектории полета к планете и т. д.) и специального отсека, выполнявшегося по двум схемам в зависимости от основной задачи полета. Если основной задачей был только пролет около планеты, то специальный отсек представлял собой металлическую герметичную конструкцию с установленными внутри фототелевизионным устройством, с помощью которого проводилось фотографирование, и приборами специальной аппаратуры (например, аппаратурой радиозондирования поверхности планет для исследования температуры, влажности, характера поверхности и т.д.). При непосредственном исследовании планеты роль специального отсека выполнял спускаемый аппарат, имеющий теплозащитное покрытие, внутри которого находились парашюты для мягкой посадки на поверхность планеты, радиокомплекс и системы, обеспечивающие нормальное функционирование научных приборов, предназначенных для исследования планеты. Так как параметры атмосферы Марса и Венеры различны, то и конструкция спускаемых аппаратов для исследования этих планет отличалась толщиной теплозащитного покрытия и конструкцией оболочки спускаемого аппарата.
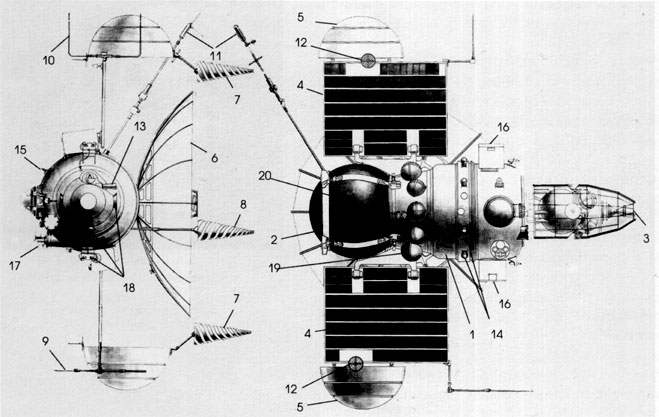 | Автоматическая межпланетная станция 2МВ-1 для посадки на поверхность планеты Венера 1. Герметичный орбитальный отсек 2. Спускаемый аппарат 3. Корректирующая двигательная установка 4. Солнечные батареи 5. Радиаторы системы терморегулирования 6. Остронаправленная параболическая антенна 7. Малонаправленные антенны 8. Антенна проверки спускаемого аппарата 9. Передающая антенна метрового диапазона 10. Приемная антенна метрового диапазона 11. Всенаправленная антенна аварийной радиолинии 12. Антенны для приземного участка 13. Датчик ориентации на Землю 14. Датчики научной аппаратуры 15. Датчик точной солнечной и звездной ориентации с защитной крышкой 16. Блоки аварийной радиолинии 17. Датчик постоянной солнечной ориентации 18. Сопловые аппараты 19. Баллоны со сжатым азотом для системы ориентации 20. Датчики контроля солнечной ориентации |
Для отработки систем и их взаимовлияния было предусмотрено изготовление технологических объектов, укомплектованных электрически действующими приборами, а также экспериментальных макетов для отработки теплового режима АМС, процессов ее отделения от РН и разделения спускаемого аппарата и орбитального отсека.
В августе 1962 года на техническую позицию полигона доставили три автоматические межпланетные станции: две в варианте для посадки и одна в пролетном варианте. По требованию Академии наук СССР предусматривалась стерилизация АМС в варианте посадки (2МВ-1 и 2МВ-3).
 "Марс-1" (2МВ-4№4) |
24 октября, 1 и 4 ноября 1962 года были запущены три АМС в сторону Марса. Первый и третий пуски оказались аварийными, и опять из-за отказа блока Л. Второй пуск прошел удачно: в сторону Марса была выведена АМС "Марс-1" (2МВ-4 № 4), хотя из-за негерметичности клапана произошла утечка рабочего тела (азота) из баллонов системы ориентации, и через несколько суток станция стала неуправляемой. Однако до этого на остатках газа системы ориентации станция была раскручена вокруг оси, перпендикулярной плоскости солнечных батарей, а ось направлена на Солнце, что обеспечило станции режим гироскопической стабилизации и подзарядку бортовых батарей. Благодаря этому связь со станцией продолжалась еще четыре месяца, за которые удалось провести ряд научных исследований межпланетного пространства и проверить функционирование центра дальней космической связи на расстояние до 10 000 000 км.
Для выяснения причин возникшей аварийной ситуации на станции создали комиссию, которая обнаружила во многих клапанах, поставляемых одним из заводов Министерства авиационной промышленности, следы канифоли, которые препятствовали полному закрытию клапанов. По результатам пусков АМС 2МВ и накопленного опыта были проведены доработки станции и ее систем. Доработанной станции был присвоен индекс 3МВ.
Следующие запуски АМС в сторону Марса 11 ноября 1963 года (3МВ-1) и 19 февраля 1964 года (3МВ-4) снова закончились неудачей: в ноябре 1963 года запуск IV ступени произошел при нерасчетной ориентации автоматической межпланетной станции в пространстве, что привело к входу станции в атмосферу Земли, а при запуске в феврале 1964 года произошел взрыв блока И из-за замерзания в трубопроводе горючего.
Запуск АМС 3МВ-1 № 5 27 марта 1964 года в сторону Венеры опять был аварийным. Анализ аварии позволил выявить причину предыдущих неудач. Причина заключалась в том, что была допущена проектно-конструкторская ошибка, в результате которой двигатель IV ступени (блок Л) не запускался.
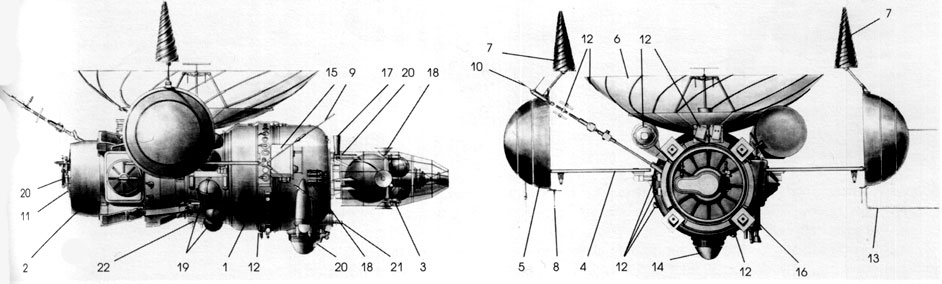 Автоматическая межпланетная станция 2МВ-4 для фотографирования планеты Марс
|
IV ступень имела отдельный блок обеспечения запуска, на ферменной конструкции которого располагалась система ориентации и стабилизации, а также автоматика двигателя с аккумуляторными батареями электропитания. Система управления должна была за 70 с до включения двигателя IV ступени переключить электропитание системы ориентации и стабилизации с батарей блока обеспечения запуска на батареи блока Л. Однако переключения электропитания не произошло, и IV ступень с АМС в течение 70 с находилась в неуправляемом режиме. Работа блока Л могла быть успешной (1ВА, 2МВ-4), если угловые возмущения IV ступени не изменяли ее положения больше допустимого, электропитание в этот момент включалось от системы управления IV ступени. При возмущениях, больше допустимых, гироскопы становились на упоры и двигатель блока Л не включался.
Ошибку, принесшую столько бед, устранили в течение 15 мин. Но самое трудное было еще впереди. Запуск АМС 3МВ-1 № 4 произведен 24 апреля 1964 года в сторону Венеры, прошел без замечаний по ракете-носителю, но в орбитальном отсеке АМС обнаружилась негерметичность, давление в течение недели снизилось до 1 мм рт. ст., и станция свою задачу не выполнила. До 25 мая 1964 года проводилась систематическая связь со станцией на батареях и передатчиках, находящихся в герметичном спускаемом аппарате. Станцию перевели в режим гироскопической стабилизации, но, несмотря на это, за месяц до достижения планеты Венера связь с ней была потеряна. Станция пролетела на расстоянии 110 000 км от Венеры и получила наименование "Зонд-1".
По результатам этого запуска каждый герметичный отсек по технологии изготовления должен был проверяться вибрацией на низких частотах с обязательной проверкой рентгеном всех сварных швов.
Недостаточная отработанность станции 3МВ дала о себе знать: на станции 3МВ-4 № 2, запущенной в сторону Марса 30 ноября 1964 года, не раскрылись солнечные батареи и нарушился режим работы системы энергопитания. Хотя 15 декабря 1964 года батареи раскрылись после проведения ряда динамических операций со станцией, станция вновь не выполнила свои задачи. Она получила наименование "Зонд-2". К этому времени был накоплен значительный опыт по отработке методики управления такого рода станциями. 18 июля 1965 года в сторону Марса вывели АМС 3МВ-4 № 3, получившую название "Зонд-3" и полностью выполнившую всю намеченную программу (фотографирование обратной стороны Луны, качественно не выполненное в 1959 году, исследование межпланетного пространства и решение ряда технических проблем).
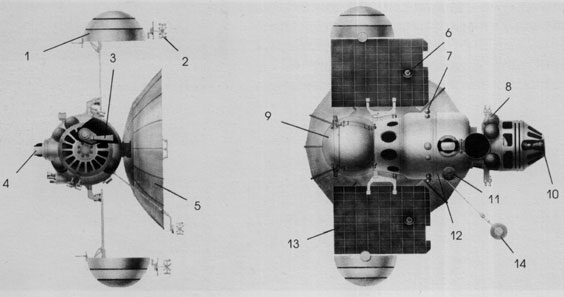 | Станция "Зонд-1" (3МВ-1 № 4) 1. Радиаторы системы терморегулирования 2. Малонаправленные антенны 3. Датчик ориентации на Землю (29К) 4. Датчик точной ориентации на Солнце и звезду (25К) 5. Параболическая антенна 6. Датчики контроля ориентации 7. Датчики научной аппаратуры 8. Пневмосистема ориентации 9. Спускаемый аппарат 10. Корректирующая двигательная установка 11. Датчик постоянной ориентации на Солнце (21К) 12. Орбитальный отсек 13. Солнечные батареи 14. Штырь магнитометра с антенной проверки спускаемого аппарата |
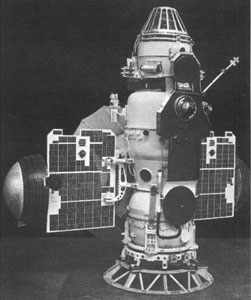 "Венера-2" (3МВ-4 № 4) 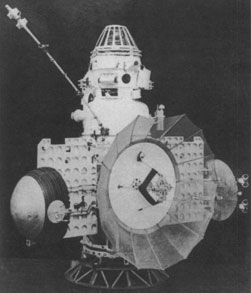 "Венера-3" (3МВ-3 № 1)  Г.Н. Бабакин |
16 ноября 1965 года в сторону Венеры была запущена АМС 3МВ-3 № 1, получившая название "Венера-3". Программа полета была выполнена, станция достигла поверхности планеты, доставив 1 марта 1966 года вымпел СССР. Это был первый в мире перелет космического аппарата с Земли на другую планету.
При пусках АМС "Венера-2" и "Венера-3" использовался "марсианский" задел по АМС с соответствующими доработками, чем и объясняются их индексы.
При пуске 23 ноября 1965 года на промежуточную орбиту АМС вывели в нестабилизированном положении вследствие аварии III ступени (блока И — ненормальная работа ДУ на конечной ступени — 528 с). В средствах массовой информации этот аппарат объявлен как "Космос-96".
Из 19 проведенных запусков автоматических межпланетных станций только два можно назвать удачными. Это объясняется несколькими причинами.
■ Запуск ракетного блока Л на промежуточной орбите в условиях невесомости проводился впервые. Условия его полета, характер среды, влияющие факторы были неизвестны. Этим объясняется большое количество отказов блока Л, запуск которого проходил над Атлантикой, в районе Гвинейского залива. Получить телеметрическую информацию с борта IV ступени в темпе ее полета в то время не представлялось возможным, информация приходила с кораблей командно-измерительного комплекса только в записи на ЗУ и очень поздно. Поэтому некоторые технические решения были не слишком корректными и запоздалыми.
■ Задачи, которые предполагалось решить с помощью АМС (например, попасть точно на Марс или Венеру, расположенные от Земли на огромных расстояниях), обусловили сложность ее конструкции, что сказалось на надежности.
■ Время полета к планетам исчислялось не сутками, а многими месяцами. Естественно, что общее время работы бортовых систем АМС во много раз превышало время работы бортовых систем ракеты-носителя. Отсюда возникали повышенные требования к надежности и ресурсу бортовых систем АМС, которые были недостаточно учтены разработчиками аппаратуры, несмотря на значительный объем экспериментальной отработки.
■ Было очень много неизвестного, впервые встречающегося, а учиться было негде и не у кого. Учил только собственный опыт. В конце 1965 года работы по АМС были переданы в ОКБ им. С.А. Лавочкина (главный конструктор Г.Н. Бабакин), т. е. тогда, когда разработчики уже подходили к намеченной цели, пройдя тернистый путь ошибок, обучения и накопления опыта.
Проектные работы по автоматическим аппаратам велись в секторе, возглавляемом Г.Ю. Максимовым, который являлся одним из основных энтузиастов автоматических исследовательских аппаратов.
В разработках проектов АМС участвовали Л.И. Дульнев, Г.С. Суссер, С.Н. Ивушкина, Н.Г. Цывинская, А.Н. Матвеев, Т.И. Близнецова, М.И. Герасимова, А.А. Дашков, ?.П. Калмыков, А.И. Шуруй, А.И. Пациора, Н.Н. Рукавишников, А.А. Шустов, С.А. Савченко, М.В. Краюшкин, Ю.А. Богданович, Г.В. Носкин, Е.А. Башкин, О.И. Бабков, В.А. Расторгуев, Е.М. Райхер, А.А. Федюшин, Н.Д. Родителев, В.Н. Кондрашев, К.С. Карагезян, В.И. Староверов, Б.М. Антонов, О.В. Сургучев, Е.И. Клименко, Е.И. Козлов, В.И. Суровых, Т.М Прудников, А.Д. Сверчков, Б.П. Скотников, В.А. Смирнов, В.И. Нечаев, Б.М. Попов. В работах по пускам АМС принимали участие А.И. Осташев, К.П. Симагин, Б.М. Музычук, Н.П. Самохин и др. Ведущим конструктором этой темы был В.И. Петров.
 Вымпелы автоматических станций "Венера-1" и "Венера-3" |
Прилунение. Продолжение изучения Луны
В 1960 году ОКБ-1 возвращается к вопросу создания автоматической станции для получения изображения лунной поверхности с осуществлением ее мягкой посадки на поверхность Луны.
В январе того же 1960 года было принято Решение о развитии исследования космического пространства, в котором предусматривалось создание автоматической станции на Луне и в ее районе. Устанавливался срок запуска (АС Е6) -1961 год. Решению предшествовало завершение работ по станциям Е1, Е1А, Е2, Е2А, Е3 и начало отработки четырехступенчатой РН 8К78. Это создавало предпосылки ускоренной разработки и наземной отработки автоматической станции Е6 для осуществления мягкой посадки на Луну с обеспечением прямой телевизионной передачи на Землю изображения лунной поверхности.
26 марта 1961 года С.П. Королев писал Д.Ф. Устинову о том, что в ОКБ-1 подтверждена принципиальная возможность с помощью четырехступенчатого носителя осуществить мягкую посадку аппарата Е6 на поверхность Луны и создать искусственный спутник Луны.
Для станции, способной совершить посадку на Луну, необходимо было создать: двигательную установку, выполняющую коррекцию траектории полета аппарата и торможение его при посадке на Луну; автоматическую автономную лунную станцию с радиокомплексом, командными и телеметрическими каналами для работы с нею на Луне, с малогабаритной телевизионной камерой, собственной системой терморегулирования, автоматикой и химическими источниками тока, системой амортизации; объединенную компактную систему управления движением III и IV ступеней РН и собственно АС при коррекции траектории и подлете к Луне.
Многие вопросы обеспечения совместной надежной работы этих систем могли быть решены только в реальных полетных условиях.
В процессе модернизации РН стартовую массу АС увеличили до 1580 кг, а массу АЛС — до 100 кг.
Автоматическая станция Е6 состояла из трех частей:
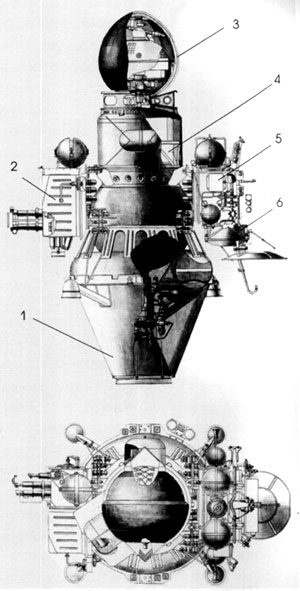 Общий вид автоматической станции "Луна-9" 1. Двигательная установка 2. Отделяемый отсек № 1 с системой астронавигации 3. Автоматическая лунная станция (АЛС) 4. Отсек системы управления (И-100) 5. Отделяемый отсек № 2 с радиоаппаратурой 6. Радиовысотомер Основные характеристики АС Е6
|
■ двух сбрасываемых перед торможением у Луны отсеков с аппаратурой;
■ автоматической автономной лунной станции.
АС Е6 была снабжена специальной оптической системой астронавигации, работающей с помощью пяти групп датчиков: двух земных, двух лунных и одного солнечного. С помощью этой системы обеспечивались операции, позволяющие осуществить прилунение АЛС в заданном районе.
Конструктивно АС Е6 выполнялась в виде блочной схемы, позволяющей при приближении к Луне сбрасывать выполнившие свои функции отсеки для того, чтобы на последнем этапе (торможение перед посадкой на Луну) аппарат имел минимальную массу. При этом был применен ряд оригинальных конструктивных решений. Каркас ДУ — разработка ОКБ-2 — использовался как конструктивно-силовая основа автоматической станции. На верхнюю, точно обработанную плату бака окислителя устанавливался основной блок (гироплатформа) объединенной системы управления, которую разработало НИИ-885. Блок закрывался герметичным сварным алюминиевым корпусом, на котором устанавливался ложемент для АЛС. На каркасе ДУ устанавливались также штыревой датчик касания поверхности Луны и баллон системы наддува амортизаторов АЛС. Снаружи устанавливались оптическая аппаратура системы астронавигации и баллоны со сжатым азотом — рабочим телом микродвигателей системы ориентации.
Первая автоматическая автономная лунная станция выполнялась как автономно действующий на поверхности Луны аппарат. Станция была оснащена амортизаторами, обеспечивающими рассеивание основной части кинетической энергии при соударении АЛС с поверхностью Луны. Корпус станции был выполнен из алюминиевого сплава и вместе с четырьмя раскрывающимися лепестками имел овально-сужающуюся форму, лепестки закрывали иллюминатор телевизионного устройства и образовывали приемопередающую антенну радиокомплекса автоматической станции на траектории полета к Луне.
Полет автоматической станции Е6 осуществлялся по следующей схеме. После выведения АС на околоземную орбиту в заданный момент времени выдавалась команда на включение ДУ IV ступени (блок Л) РН. Станция разгонялась до второй космической скорости по заданной траектории движения к Луне и отделялась от РН. Затем проводилась ориентация АС на Солнце и выдавалась команда на ее закрутку с целью обеспечения теплового режима. В заданное время, перед включением ДУ, система астронавигации выполняла измерения параметров траектории, которые передавались по радиоканалу на Землю и использовались для вычисления уставок, которые необходимо было ввести по радиоканалу в систему автоматического наведения и систему управления, на коррекцию траектории движения. После выполнения заданной ориентации выдавалась команда через систему управления на включение КТДУ автоматической станции для коррекции траектории. На расстоянии 8300 км от Луны с помощью системы астронавигации выполнялось построение лунной вертикали, т.е. ось корректирующей тормозной двигательной установки выставлялась по направлению на центр Луны и гироскопы "запоминали" это положение осей. Программно-временное устройство включало радиовысотомер на "прогрев", на расстоянии 75 км от Луны он выдавал команду на включение КТДУ на выбранный тормозной режим.
При этом происходило отделение сбрасываемых отсеков, термоукупорки и осуществлялся наддув амортизаторов АЛС до 1 атм. На расстоянии 250-265 м от поверхности Луны прекращалась работа двигателя в режиме торможения, и дальнейшее снижение происходило в режиме парашютирования на управляющих соплах КТДУ. На этом участке высвобождался ленточный датчик-щуп, который при соприкосновении с лунной поверхностью выдавал команду на срабатывание пирозамка отделения АЛС от ложемента АС. Станция отделялась от ложемента под действием истекающего газа из амортизационных оболочек в направлении, обратном движению к Луне, что позволяло снизить скорость прилунения до 15 м/с.
Через 4 мин после выключения КТДУ программно-временное устройство АЛС выдавало команду на сброс амортизационных баллонов, и еще через 1 мин проходила команда на срабатывание пирозамка открытия лепестковых антенн. Антенны под действием пружин раскрывались, выравнивая станцию на лунной поверхности. При этом открывались четыре ленточные антенны с подвешенными на них элементами для оценки контрастности освещения и штанга магнитометра. Происходило переключение радиоканалов: телевизионного — на лепестки, а командного и телеметрического — на ленточные антенны. На верхней полуоболочке АЛС на пружинных основаниях были расположены двугранные зеркала-призмы для получения стереоскопического изображения рельефа лунного грунта. По команде с Земли включалась телевизионная камера обзора лунной поверхности через цилиндрический иллюминатор из кварцевого стекла. Тепловой режим АЛС обеспечивался применением испарительной системы. Корпус АЛС снаружи был закрыт экранно-вакуумной изоляцией.
Летным испытаниям предшествовали многоплановые работы по отработке конструкций.
■ Отработана конструкция штыря с контактным датчиком, с помощью которого вырабатывался сигнал на отделение АЛС. Отработка проводилась на специальной установке.
■ Отработана конструкция надувных баллонов, обеспечивающая мягкую посадку АЛС на поверхность Луны. Отработка проводилась в барокамере. Полностью собранная станция устанавливалась в барокамеру, надувные баллоны после откачки барокамеры надувались, сбрасывая при этом термоукупорку.
■ Отработано отделение боковых отсеков КА при температуре минус 50°С. Отработка проводилась на технологическом макете КА. Пирозамки замораживались жидким азотом, а затем подрывались.
 Аналог автоматической лунной станции в музее РКК "Энергия" |
■ Отработана система мягкой посадки и проверена работа АЛС после прилунения: сброс АЛС с высоты 20 м, ее приземление, отделение надувных баллонов, раскрытие лепестковых и штыревых антенн. Работа теле— и радиоаппаратуры осуществлялась на территории НИИ-229 (Г.М. Табаков). Проверка на так называемое "бликование", т.е. проверка на отсутствие воздействия бликов Солнца на чувствительные системы, проводилась в Крыму с зеркальным подсветом объекта Солнцем.
■ Отработана испарительная система терморегулирования АЛС.
■ Отработан режим поиска реперных светил системой астронавигации. Отработка проводилась на специальном стенде, имевшем три степени свободы перемещения.
■ Отработаны микродвигатели системы ориентации.
■ Отработана КТДУ при имитации подлета к лунной поверхности.
■ Проведены сбросовые испытания объекта с остатками топлива в баках с целью проверки возможности возникновения взрыва или воспламенения этих остатков при разрушении каркаса АС при падении на поверхность Луны.
■ Проведены тепловые испытания в барокамере.
Экспериментальная отработка проводилась в 1962 году.
Летные испытания АС Е6 начались в январе 1963 года, С 1963 по 1966 год провели 12 пусков (4.01.63 г., 3.02.63 г., 2.04.63 г., 21.03.64 г., 20.04.64 г., 12.03.65 г., 10.04.65 г., 9.05.65 г., 8.06.65 г., 4.10.65 г., 3.12.65 г., 31.01.66 г.). Из них пять были аварийными, причем в четырех случаях — из-за неисправности системы управления носителя. Отличительной особенностью системы управления было то, что система управления блоков И, Л и станции Е6 была единой. После того как систему управления станции Е6 сделали автономной, задача выведения станции Е6 к Луне выполнялась.
Полностью программа пуска выполнена в одном случае. Это произошло 31 января 1966 года (старт в 14 ч 41 мин 37,0 с) при запуске станции, получившей название "Луна-9".
3 февраля 1966 года в 21 ч 45 мин 4,25 с АС прилунилась. За время полета было проведено 13 сеансов связи общей продолжительностью 4 ч 40 мин, выдано 182 команды по КРЛ, заложено шесть уставок для автономного управления объектом. 3 февраля 1966 года в 21 ч 49 мин 4,0 с зафиксирован прием телеметрической информации АЛС. В период с 3 по 7 февраля 1966 года телевизионная установка АЛС включалась шесть раз, что позволило впервые получить круговой обзор лунной поверхности в районе прилунения АС.
С конца 1965 года работа по теме Е6 проводилась совместно с ОКБ им. С.А. Лавочкина, куда была передана вся документация по этой теме, при сохранении за ОКБ-1 ответственности за решение проблемы мягкой посадки. Подготовка и запуск АС "Луна-9" проводились совместно с заводом им. С.А. Лавочкина и КБ главного конструктора Г.Н. Бабакина.
В работах по темам Е1, Е2, Е3, Е6 принимали участие М.С. Хомяков, В.И. Петров, А.В. Палло, А.Т. Луговой, О.Г. Ивановский, Г.Ю. Максимов, Л.И. Дульнев, Н.П. Береснев, В.С. Трошин, С.Н. Панфилова, В.С. Мурашов, Д.А. Князев, А.А. Кочкин, Н.Б. Захарова, В.Е. Козлов, В.Ф. Сибирцев, О.В. Сургучев, Ю.В. Капинос, В.И. Староверов, К.С. Карагезян, Е.С. Макаров, ГА. Мерсов, А.А. Дашков, В.В. Ивашкин, Н.А. Карбонов, Е.А. Нареманов, В.А. Петросян, Г.Н. Дегтяренко, Л.И. Алексеев, А.И. Нечаев, В.Д. Сорокалетов, Б.М. Попов, В.Г. Меняйлов, А.И. Яцушко, Б.П. Скотников, Ю.А. Богданович, О.Н. Воропаев, П.И. Ермолаев, О.Д. Жеребин, В.С. Патрушев, В.В. Калантаев, М.В. Брусков, В.А. Котович, В.П. Легостаев, В.Г. Кравец, Н.С. Некипелов, В.А. Николаев, Ю.М. Фрумкин, И.Ф. Столетний, М.М. Тюлькин, С.Н. Шустиков, Е.В. Шабаров, Л.И. Щедрина, В.В. Эстрович.
Разработчиками фототелевизионной системы и бортового радиокомплекса был НИИ-885 (М.С. Рязанский, Е.Я. Богуславский), системы астронавигации — филиал НИИ-1 (В.П. Морачевский), системы управления посадкой — НИИ АП (Н.А. Пилюгин).
 Панорама Луны, полученная с борта АЛС |
Первый спутник связи "Молния-1"
В соответствии с Постановлением Правительства от 30 октября 1961 года начались проектные работы по созданию первого советского ИСЗ — активного ретранслятора "Молния-1" — и построение с его помощью экспериментальной линии дальней радиосвязи между Москвой и Владивостоком. Как и почти все в то время в космической технике, такая разработка проводилась впервые, подобная система не имела прототипа. Поэтому замыслы ученых и специалистов в области радиотехники не шли дальше проведения натурных экспериментов по исследованию распространения радиоволн, создания экспериментального космического аппарата. А затем накопленный в этой работе опыт предполагалось использовать для проектирования будущих спутников связи.
Осторожные предложения специалистов в области радиотехники казались разумными, тем более что и американские планы предусматривали именно такой постепенный путь экспериментов и накопления данных (вспомним "Эхо", "Реле", "Тельстар"). Директивные документы по созданию экспериментальной космической линии связи были подготовлены под влиянием этих превалирующих настроений. Предусматривалось изготовить всего два спутника и провести лишь исследования и эксперименты в области радиосвязи и телевидения.
В конце 1961 года проектный отдел 29 (Е.Ф. Рязанов) подготовил проспект по спутнику связи и направил С.П. Королеву на утверждение. В этом проспекте рекламировался экспериментальный спутник связи, при использовании которого могли быть выполнены необходимые эксперименты и исследования.
С.П. Королев проспект не утвердил, а вернул его на доработку, сделав ряд существенных замечаний:
■ разрабатывать надо не спутник для экспериментов, а сразу такой спутник, на основе которого можно было бы строить систему связи по всей территории Советского Союза;
■ ресурс такого спутника на первых порах должен быть не менее 6-9 месяцев;
■ для отработки в реальных условиях космического полета необходимо изготовить не 2, а 5-7 спутников, чтобы всесторонне их испытать и провести даже опытную эксплуатацию системы связи.
Заслуга С.П. Королева в том и состояла, что он, реально оценивая уровень достижений космической техники к тому времени, сумел своевременно поставить задачу о разработке спутника для системы связи, хотя решение этой задачи было весьма сложным. Возвращенный С.П. Королевым проспект был переработан в документ не столько рекламный, сколько носящий характер предложений о том, что делать, как делать, в какие сроки, с какими характеристиками, после чего удалось доказать в Правительстве правильность и своевременность этого предложения. Оно было одобрено и начало претворяться в жизнь.
Задача в такой постановке стимулировала разработчиков на использование новейших достижений космической техники, дальнейшее ее развитие, способствовала воспитанию высококвалифицированных кадров. Она нацелила разработчиков на проектирование спутниковой системы связи для территории Советского Союза. Были рассмотрены различные варианты такой системы: и наземных средств, и спутника. Американские специалисты шли по пути создания спутника связи с малой мощностью излучаемого сигнала, строительства наземных станций с большими размерами антенны и высокочувствительной приемной аппаратурой. Этот путь был оправдан тем, что им требовалось построить по существу межконтинентальную связь между Северной Америкой и Европой. Страны обоих континентов имели уже в то время широко разветвленную связную сеть, поэтому на каждом из континентов достаточно было иметь по одной приемопередающей наземной станции для работы через спутник-ретранслятор, подключив их к имеющейся внутриконтинентальной связной сети.
В нашей стране в начале 60-х годов происходило интенсивное возникновение и развитие региональных территориально-производственных комплексов, удаленных друг от друга и от центральных обжитых районов. Строительство линий связи центра с региональными районами и последних между собой с использованием только традиционных наземных линий (кабельных и радиорелейных) требовало больших затрат средств и времени. Быстрее и экономичнее эта задача могла быть решена только с использованием связи через спутники-ретрансляторы. Для этих целей необходимо было создание широкой сети наземных станций для работы через спутник-ретранслятор, охватывающей все регионы нашей страны. Экономически выгодно оказывалось строить большое количество сравнительно простых и дешевых наземных пунктов, а спутник-ретранслятор — с большой мощностью излучаемого сигнала.
Таким образом, работа по созданию первого советского спутника связи получила конкретную направленность, а требования к нему стали определяться логикой достижения конечной цели. Спутник должен был иметь мощный ретранслятор, мощную систему энергопитания, эффективную систему терморегулирования. Для лучшего использования излучаемой энергии необходимо было иметь бортовую антенну с высокой направленностью излучения, но способную передать сигнал на все наземные пункты, находящиеся одновременно в зоне радиовидимости, антенну, способную работать в широком диапазоне радиоволн. Для одновременного приема и передачи сигналов в сеансах связи необходимо было ориентировать антенну на Землю. Как спутник для системы связи он должен был обладать высоким ресурсом, совершать полет по такой орбите, которая позволила бы построить систему из возможно меньшего количества спутников. Для сопряжения спутников в системе, т.е. обеспечения согласованности их движения, необходимо было спутник оснастить корректирующей двигательной установкой.
Спутник для системы связи должен был изготавливаться серийно. Поэтому конструкция его должна была обладать высокой технологичностью, а время подготовки к запуску должно было быть как можно меньшим. Ко времени разработки спутника связи уже создали бортовой и наземный комплексы управления космическими аппаратами, включающие аппаратуру командной радиолинии, радиотелеметрии, траекторных измерений. Чтобы сократить сроки разработки и материальные затраты, решено было воспользоваться готовой аппаратурой, управление системами спутника организовать с учетом имеющегося количества команд и телеметрических параметров. Одной из первых задач при разработке спутника связи являлось определение его массы и орбиты, на которую его можно было бы вывести. Предварительные оценки показали, что масса спутника получается достаточно большой и вывести его можно на невысокую орбиту. Потребовались более углубленные проработки. С этой целью впервые в практике проектных работ проводилась статистическая обработка относительных весовых характеристик уже разработанных к тому времени космических аппаратов, в результате которой были получены массовые коэффициенты служебных бортовых систем и конструкции аппарата. Стал ощутим, таким образом, достигнутый уровень развития космической техники, который и был принят в качестве отправной точки. Массу спутника уточнили, можно было уточнить вслед за этим и его орбиту.
Что касается выбора орбиты, то необходимо заметить, что наиболее просто проблемы ориентации спутника и бортовой антенны на Землю решаются в том случае, если спутник совершает полет по круговой орбите. Однако с самого начала разработок стало очевидным, что имеющиеся возможности созданных ракет недостаточны для выведения спутника связи на необходимую для этих целей высокую круговую орбиту. Оставалось одно — использовать эллиптические орбиты. Параллельно шли расчеты по определению параметров орбиты, на которую можно было бы вывести спутник, и, по мере углубления проработок, — уточнение его массы. В результате удалось добиться возможности выведения спутника на высокоэллиптическую орбиту с периодом обращения 12 ч, высотой апогея 40 000 км над Северным полушарием. Совершая по такой орбите два оборота в сутки, спутник на одном из них пролетает над Северной Америкой, на другом — над Советским Союзом, обозревая при этом всю территорию нашей страны непрерывно в течение не менее 9 ч. Эта орбита подходила для спутника связи. Из трех спутников, движущихся друг за другом над нашей страной, можно было построить систему круглосуточной связи по территории СССР.
Одной из самых сложных проблем при проектировании спутника связи была разработка системы ориентации. Требовалось обеспечить одновременную ориентацию солнечных батарей на Солнце и антенны на Землю в течение длительных сеансов связи. Использовать только систему реактивных микродвигателей для этих целей невозможно, так как потребный запас топлива для них существенно превышал массу самого спутника, Поэтому был предложен маховик-гироскоп в упруговязком подвесе, с помощью которого можно удерживать постоянную ориентацию одной оси — на Солнце и путем изменения угловой скорости маховика осуществлять развороты спутника вокруг этой оси.
Теперь проблема постоянной ориентации солнечных батарей на Солнце и одновременной ориентации антенны на Землю в сеансах связи при малых затратах топлива для микродвигателей могла быть и была решена следующим образом. Плоскость солнечных батарей расположили перпендикулярно оси вращения маховика-гироскопа, а антенну стали поворачивать в тангажной плоскости. Маховик-гироскоп, сохраняя постоянным направление оси вращения, удерживал ориентацию солнечных батарей на Солнце. По мере отклонения Солнца от оси маховика-гироскопа по сигналам от датчика солнечной ориентации периодически включались микродвигатели и восстанавливали ориентацию оси вращения маховика-гироскопа на Солнце.
Перед каждым сеансом связи осуществлялось вращение всего аппарата вокруг направления на Солнце до тех пор, пока Земля не оказывалась в плоскости размещения бортовой антенны, которая затем, отклоняясь от исходного положения, наводилась на освещенный край Земли с помощью расположенного на антенне оптического датчика. Такая ориентация удерживалась в течение всего сеанса.
Система энергопитания состояла из солнечной батареи площадью, приблизительно равной 20 м2, и специально разработанной для спутника "Молния-1" аккумуляторной батареи, рассчитанной на большое количество зарядно-разрядных циклов. В солнечной батарее для обеспечения защиты фотоэлектрических преобразователей от воздействия радиации использовалась наклейка защитных стекол, что позволило значительно увеличить срок ее службы.
Перед разработчиками системы терморегулирования тоже стояли сложные задачи. Впервые в космической технике необходимо было осуществить непосредственное жидкостное охлаждение высокотемпературных элементов — ламп бегущей волны блока усиления ретранслятора. ЛБВ были выделены в отдельный агрегат, к которому подключили жидкостный контур системы терморегулирования. Спутник "Молния-1" -первый объект, на котором в течение продолжительных сеансов связи выделялось большое количество тепла. Обеспечение требуемого температурного режима внутри гермоотсека удалось успешно решить, используя постоянную ориентацию одной из осей спутника на Солнце. В плоскости солнечных батарей к гермоотсеку был прикреплен радиатор-нагреватель, постоянно освещенный Солнцем. Поверхность радиатора, обращенная к Солнцу, была оклеена фотоэлектрическими преобразователями и, таким образом, использована для увеличения площади солнечных батарей. В тени, за радиатором-нагревателем, вокруг цилиндрической обечайки гермоотсека был установлен радиатор-холодильник. Такая схема устройства системы терморегулирования позволяла при повышении температуры в отсеке переключать жидкостный контур на радиатор-холодильник, при понижении температуры — на радиатор-нагреватель. Увеличение интенсивности теплообмена достигалось тем, что с помощью вентилятора осуществлялась обдувка аппаратуры газом, для организации движения которого в отсеке был установлен воздуховод, разделяющий встречные потоки газа.
Для проведения коррекции орбиты спутника использовался однокамерный двигатель на компонентах топлива АК+НДМГ с тягой в пустоте 200 ±30 кгс, суммарным удельным импульсом тяги 8000 кгс·с/кг, удельным импульсом тяги 290 кгс·с/кг, допускающий многократное включение. Коррекция выполнялась в перигее орбиты. В системе управления помимо использования традиционных радиолиний — командной и траекторных измерений — пришлось применить программно-временное устройство, по командам которого, "зашитым" в память или закладываемым на борт в виде уставок, происходило управление работой бортовых систем автоматически, без вмешательства с Земли. Так, по командам от ПВУ можно проводить в автоматическом режиме подряд до шести сеансов связи, осуществлять управление работой бортовых систем при проведении коррекции орбиты, в процессе которой спутник вообще не был виден с наземных пунктов управления, расположенных на территории СССР. Сложная задача стояла перед разработчиками антенно-фидерных устройств спутника, которые разрабатывались двух видов: слабонаправленные, с полусферической диаграммой направленности, — для радиолиний командной, телеметрической, траекторных измерений; узконаправленные — для тех же радиолиний и одновременно для ретранслятора.
В начале сеанса связи управление работой спутника осуществлялось через слабонаправленные антенны, а после ориентации на Землю антенны ретранслятора через нее шла передача служебной информации. При разработке антенны ретранслятора надо было реализовать одновременно противоречащие друг другу требования. С одной стороны, требовалась достаточно широкая диаграмма направленности (20°) для обеспечения связи с наземными пунктами во всей зоне радиовидимости; с другой стороны — как можно большее усиление антенны, чтобы наземные приемные устройства были более простыми.
Трудности усугублялись тем, что через антенну ретранслятора передавалась еще информация служебных бортовых радиосредств. Это усложняло устройство облучателя. Кроме того, частоты ретранслятора и служебных радиосистем были очень близки друг другу, что затрудняло их фильтрацию, И, наконец, на облучателе стоял оптический прибор ориентации антенны на освещенный край Земли, что также влияло на диаграмму направленности антенны. Спроектировать такую антенну на основании только расчетов не представлялось возможным, Пришлось провести огромный объем экспериментальных исследований для выбора ее наилучшего конструктивного устройства.
Непростая задача стояла также перед разработчиками привода узконаправленной антенны. В процессе сеанса связи зеркало антенны должно было периодически поворачиваться по командам от установленного на нем оптического прибора. В момент включения и выключения привода могли возникать автоколебания штанги, на которой установлено зеркало, что приводило бы к флуктуациям сигнала. Во избежание этого явления в привод был встроен компенсирующий маховичок, вращающийся в направлении, обратном направлению поворота зеркала. Маховичок начинал вращаться одновременно с включением привода и останавливался при его выключении. При разработке компоновочной схемы спутника необходимо было учесть следующие требования:
■ центр тяжести должен лежать на продольной оси аппарата, чтобы свести к минимуму возмущения на работу маховика-гироскопа, вектор кинетического момента которого совпадал бы с продольной осью;
■ момент инерции массы относительно продольной оси должен быть больше, чем относительно двух других осей, чтобы обеспечить устойчивость ориентации продольной оси на Солнце;
■ должны обеспечиваться доступ к любому блоку аппаратуры и агрегату, снятие и установка любого блока без снятия других, чтобы процесс сборки и испытаний был удобным и требовал как можно меньше времени;
■ поля зрения оптических приборов и диаграмм направленности бортовых антенн не должны затеняться элементами конструкции.
Эта сложная задача была решена успешно. Причем впервые на космическом аппарате удалось применить принцип агрегатирования отдельных систем. Так, корректирующая двигательная установка, пневмосистема системы ориентации и коррекции, система терморегулирования представляли собой отдельные агрегаты. Каждый из этих агрегатов мог собираться и испытываться автономно. При разборке объекта они оставались едиными, не разбирались.
Интересное решение нашли при компоновке аппаратуры внутри гермокорпуса аппарата. Аппаратуру разместили в ячейках крестообразной рамы, причем блоки установили таким образом, чтобы центровка рамы относительно продольной оси приближалась к нулевой. По раме был проложен кабельный ствол с разъемами, к которым подключалась устанавливаемая аппаратура. Обеспечивался свободный доступ к любому из приборов.
Конструктивная схема спутника выглядела следующим образом. Гермокорпус имел цилиндрическую обечайку с двумя стыковочными шпангоутами и два конических днища. В верхнем коническом днище был размещен блок ламп бегущей волны ретранслятора, требующий жидкостного охлаждения. На цилиндрической обечайке установили радиатор-нагреватель, плоскость которого перпендикулярна продольной оси, радиатор-холодильник, солнечные батареи (6 панелей) и две направленные антенны, размещенные в диаметрально противоположных точках. На верхнем коническом днище крепилась корректирующая двигательная установка, а на стыке верхнего днища с цилиндрической обечайкой крепилась рама пневмосистемы.
В верхнем днище имелся люк для доступа к гидро— и электроразъемам, которые состыковывались при сборке верхнего днища с цилиндрической обечайкой. После стыковки, заправки и проверки жидкостного контура верхнее днище и цилиндрическая обечайка больше не расстыковывались. Внутри цилиндрической обечайки к ней крепился концентрический цилиндрический воздуховод. Внутри нижнего днища был установлен маховик-гироскоп. Таким образом, чтобы получить доступ ко всем приборам и агрегатам спутника, достаточно было разъединить гермокорпус по нижнему стыковочному шпангоуту, снять верхний корпус с цилиндрической обечайкой с закрепленными на них приборами и агрегатами, а затем отстыковать приборную раму от нижнего днища.
Панели солнечных батарей в транспортном положении складывались вдвое и укладывались в виде шестигранной пирамиды, а затем, после выведения спутника на орбиту, раскрывались и оказывались в поперечной плоскости в районе стыковочного шпангоута цилиндрической обечайки с нижним конусом. Большой размах солнечной батареи (около 8 м) обеспечивал необходимое соотношение моментов инерции, а симметричность конструктивно-компоновочной схемы спутника в целом относительно продольной оси обеспечивали необходимое размещение центра тяжести аппарата. Благодаря удачной конструктивно-компоновочной схеме, органично объединившей конструкцию, системы и агрегаты спутника, а также агрегатированию систем было достигнуто высокое совершенство технологии работ со спутником. Продолжительность цикла испытаний спутника и подготовки его к запуску на технической позиции составила около семи суток — самый короткий срок в то время для космических аппаратов. Большое внимание при проектировании спутника и разработке его аппаратуры уделялось обеспечению длительного ресурса активной работы спутника. Для этих целей применялось дублирование и резервирование аппаратуры, а также проводились ее ресурсные испытания в наземных условиях в реальном масштабе времени. Так, например, ретранслятор имел три комплекта мощных (мощность на выходе 40 Вт) и два комплекта маломощных (20 Вт) передатчиков. Полностью дублировались направленные антенны и, соответственно, приборы ориентации их на Землю. В маховике-гироскопе дублировалась аппаратурная часть. Кроме того, в наземных условиях он наработал многие тысячи часов. На протяжении всего времени эксплуатации этого спутника не было ни единого отказа маховика-гироскопа в полете. Также в наземных условиях проходили ресурсную отработку в реальном масштабе времени приводы поворота узконаправленных антенн и лампы бегущей волны ретранслятора.
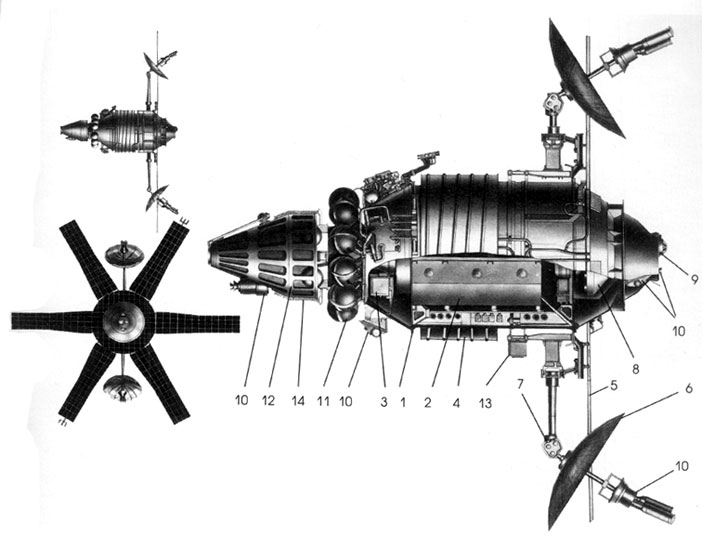 | Первый спутник связи "Молния", выводимый на высокоэллиптическую орбиту с целью обеспечения связи центральных районов страны с Дальним Востоком 1. Корпус 2. Рама с аппаратурой 3. Рама системы терморегулирования (СТР) 4. Радиаторы СТР 5. Солнечные батареи 6. Антенна ретранслятора 7. Привод антенны 8. Маховик-гироскоп 9. Оптические датчики ориентации на Солнце 10. Оптические датчики ориентации на Землю 11. Шар-баллоны системы ориентации 12. Корректирующая двигательная установка 13. Радиометр 14. Экранно-вакуумная изоляция |
Система связи на базе спутника "Молния-1" первоначально должна была состоять из спутника и двух наземных пунктов: Москвы (НИП-14) и Владивостока (НИП-15). Управление бортовыми системами спутника осуществлялось специально созданной оперативной группой, располагавшейся на территории НИП-14 (вблизи г. Щелково).
Вначале предполагалось в ОКБ-1 изготовить четыре спутника "Молния-1" — спутники первого этапа. Они должны были быть готовы к отправке на техническую позицию уже в первой половине 1963 года, практически через полтора года после начала работ. Однако неординарность задачи и задержки с поставкой аппаратуры привели к сдвигу сроков готовности спутников на целый год.
Первый запуск спутника "Молния-1" состоялся 4 июня 1964 года, но потерпел неудачу из-за аварии носителя. Вторая попытка проведена 22 августа того же 1964 года. Спутник на орбиту был выведен, но антенны не раскрылись из-за неучета жесткости проложенного по ней кабеля. Со спутником проводили испытания в нештатном режиме. Он был объявлен как спутник "Космос-41" и проработал на орбите до 26 мая 1965 года. Необходимо отметить, что С.П. Королев уже в начале 1964 года обратился в вышестоящие инстанции с просьбой о передаче работ по спутнику "Молния-1" в ОКБ-10 (г. Красноярск) "в целях развития работ по космической тематике и разгрузки ОКБ-1 и опытного завода". Его просьба была удовлетворена, и в марте 1964 года вышел по этому поводу соответствующий приказ Председателя Госкомитета по оборонной технике. Однако после двух неудачных запусков спутника к этому вопросу пришлось вернуться вновь. По указаниям Д.Ф. Устинова и заместителя Председателя ГКОТ Г.А. Тюлина на ОКБ-1 и опытный завод возлагалась задача изготовить еще четыре спутника (в том числе один запасной) со сроками изготовления в апреле-июне 1965 года. Таким образом, всего в ОКБ-1 изготовили восемь спутников "Молния-1", состоялось семь их запусков, из которых четыре были полностью успешными.
Третий запуск произведен 23 апреля 1965 года, после доработок и дополнительных наземных испытаний систем, агрегатов и узлов спутника. Он оказался успешным (спутник проработал на орбите до 26 ноября 1965 года) и явился официальным началом полетов спутников серии "Молния", тридцатилетие которого исполнилось в 1995 году
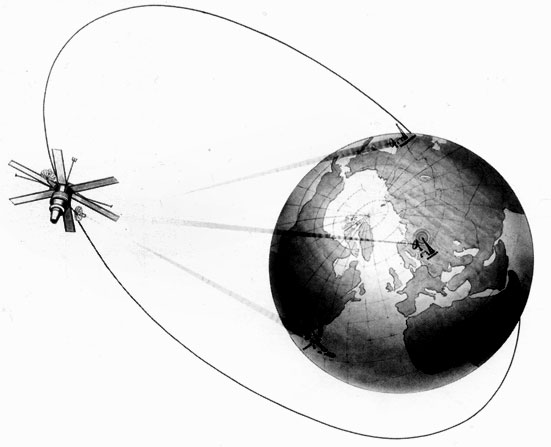 | Схема организации связи через спутник "Молния-1". Круглосуточная система дальней связи |
В центральной печати этому событию было посвящено сообщение ТАСС.
В соответствии с программой отработки системы дальней радиосвязи и телевидения с использованием искусственных спутников Земли — активных ретрансляторов 23 апреля 1965 года в Советском Союзе осуществлен запуск на высокую эллиптическую орбиту спутника связи "Молния-1". По данным вычислительного центра, спутник выведен на орбиту с апогеем 39 380 километров в северном полушарии и перигеем 497 километров в южном полушарии. Период обращения спутника 11 часов 48 минут. Наклонение орбиты 65 градусов. На борту спутника установлена ретрансляционная аппаратура для передачи программ телевидения и дальней радиосвязи, а также аппаратура командно-измерительного комплекса, системы ориентации спутника и коррекции его орбиты. Электропитание бортовой аппаратуры производится от солнечных батарей и химических источников тока. Основной задачей запуска спутника связи "Молния-1" является осуществление передач программ телевидения и дальней двусторонней многоканальной телефонной, фототелеграфной и телеграфной связи. Вся аппаратура, установленная на борту спутника связи, а также наземный радиокомплекс работают нормально. Проведенные первые передачи телевизионных программ между Владивостоком и Москвой прошли успешно. "Правда", 24 апреля 1965 г. |
 М.Ф. Решетнев |
В том же 1965 году 14 октября был успешно запущен еще один спутник (проработал до 18 февраля 1966 года). В следующем 1966 году осуществлено три запуска спутника Молния-1": один, состоявшийся 27 марта, завершился неудачей вследствие отказа носителя, а два последующих, 25 апреля и 20 октября, были успешными. Первый из спутников проработал на орбите до 2 сентября 1966 года, второй — до 29 января 1968 года.
С 1967 года изготовление и пуски спутников "Молния-1" осуществлялись другой организацией. Дело в том, что СП. Королев, несмотря на возражения ряда ведущих разработчиков, все же настоял на передаче в конце 1965 года всех работ по серийному производству КА "Молния-1" и на продолжении дальнейших работ по связным спутникам ОКБ-10 в г. Красноярске. Это ОКБ создавалось в 1961 году на базе филиала 2 ОКБ-1, которое возглавлял М.Ф. Решетнев будучи заместителем главного конструктора С.П. Королева. Впоследствии, в 1977 году, это ОКБ было преобразовано в Научно-производственное объединение прикладной механики, являющееся основным разработчиком космических систем связи и навигации в стране, которое до 1996 года бессменно возглавлял М.Ф. Решетнев, академик РАН РФ, Герой Социалистического труда, лауреат Ленинской и Государственной премий.
 Аналог спутника связи "Молния" в музее РКК "Энергия" |
Ведущими конструкторами по спутнику "Молния-1" были Д.А. Слесарев и И.И. Морозов, техническое руководство разработкой и изготовлением осуществляли заместители главного конструктора: до мая 1964 года — П.В. Цыбин, а с мая этого же года, включая летно-конструкторские испытания, — Б.Е. Черток.
В разработке, изготовлении, испытаниях и ЛКИ спутника "Молния-1" принимали участие В.Н. Дудников, В.Г. Осипов, А.И. Ходяков, А.И. Буянов, М.С. Красавина, И.П. Скрипник, Б.В. Королев, Г.Г. Воробьева, В.А. Дивин, З.И. Фролова, О.В. Сургучев, Е.П. Белявский, В.А. Алексеев, Л.Б. Простов, B.C. Ильин, Л.И. Гусев, Г.М. Гречко, Е.С. Макаров, В.П. Кураев, В.П. Гаврилов, Л.Б. Вильницкий, B.C. Сыромятников, Р.Л. Максимова, В.К. Корчинский, И.В. Козьмин, Ф.Ф. Овчинников, В.Ф. Кульчак, Б.М. Попов, К.К. Соловьева, В.И. Нечаев, Н.А. Варфоломеева, В.В. Чернов, Б.Г. Шумаков, Е.И. Смирнова, Г.Г. Тихонова, И.В. Ермаков, З.А. Аксенова, Н.Э. Корженевский, Н.П. Голунский, Г.Д. Николаенко, И.А. Сосновик, Н.А. Квятковская, Н.М. Лебедева, Л.И. Анфилатова, А.В. Максимов, Л.К. Анисимова, Т.В. Антонова, B.C. Поляков, Г.П. Иванова, А.И. Шуруй, А.А. Федюшин, В.Н. Беликов, Е.Н. Токарь, В.Н. Бранец, B.C. Семячкин, Ю.М. Захаров, Ю.П. Прокудин, М.Г. Чинаев, Л.Ф. Копачев, С.М. Хрипунов, Л.С Душутин, В.А. Николаев, А.И. Вовк, Е.И. Салапов, Е.И. Старостин, М.П. Иванов, А.И. Окунев, И.Г. Кириллов, Н.И. Галкин, Н.В. Пименов, Ф.Г. Кузьмин, И.С. Пустовалов, С.В. Тюнин, Н.А. Баранов, Р.Ф. Черкасов, Б.Н. Павельев, А.Н. Андриканис, А.В. Бачурин, М.П. Василенков, А.А. Шустов, П.Н. Куприянчик, A.M. Термосесов и др.
Велика роль в создании первого отечественного спутника связи "Молния-1" и смежных предприятий — разработчиков систем и агрегатов: НИИ-695 (Ю.С Быков, М.Р. Капланов) — ретранслятор "Альфа", НИИ-885 (М.С. Рязанский) — командная радиолиния, радиотелеметрия, траекторные измерения, НИИ-627 (А.Г. Иосифьян, Н.Н. Шереметьевский) — силовой маховик-гироскоп в упруговязком подвесе, ВНИИИТ (Н.С Лидоренко) — солнечные батареи, НИАИ (В.М. Федоров, В.В. Теньковцев) — аккумуляторная батарея, ОКБ-2 (A.M. Исаев) — корректирующая двигательная установка, ЦКБ-589 (Н.П. Виноградов) — оптические приборы системы ориентации, ВНИИ-380 (И.А. Росселевич) — бортовые телекамеры.
далее
назад