СХЕМА ЭКСПЕДИЦИИ
Что такое гравитация? Сколько ученых работали, чтобы познать ее сущность. Многие говорят, что видели НЛО, верят в мир разума не только в облике человека, но и в другом, неведомом для нас состоянии. Можно только полагать, что, наверное, мир природы будет вечно познаваться. Но если верить наблюдателям НЛО, то пришельцы способны делать такие летающие объекты, которые могут мгновенно достигать громадных скоростей и при этом перегрузка, если ее высчитать, в десятки раз превосходит ускорение свободного падения тел на Землю. Вывод напрашивается сам собой, что пришельцы, если они есть, научились владеть или управлять гравитационным или электромагнитным полями. Мы познали общие законы гравитации, электричества, создали множество машин, есть оригинальные находки и решения конструкторов, однако, на вопросы: что такое магнетизм, электричество, гравитация, еще никто не ответил.
С незапамятных времен таинственное ночное светило — Луна притягивало людей. В своих мечтах, легендах, фантастических рассказах человек не раз побывал на Луне. Уже в древнеиндийской поэме «Махабхарата» содержатся наставления для полета на Луну. Полет к Луне на крыльях описал Лукиан Самосатский (2 в.н.э.). Жюль Верн предлагал добраться до Луны с использованием громадной пушки. Но только в конце XIX века скромный учитель из Калуги К. Э. Циолковский разработал теоретическое обоснование возможности полета в космическом пространстве. В своем труде «Исследование мировых пространств реактивными приборами» (1903 г.) и в дальнейших работах Циолковский показал реальность технического осуществления космических полетов. Достигнутый к шестидесятым годам XX века уровень ракетной техники предопределил создание систем, способных доставить на Луну и вернуть на Землю людей. Схемы полета строились по-разному, но одно безусловно было ясно, что реализовываться они будут многоступенчатыми, делимыми носителями.
В США, начиная с 1958 г., были развернуты работы по лунной программе, которая включала в себя разработку многоступенчатой ракеты-носителя «Сатурн-5» и лунного комплекса «Аполлон». В мае 1961 г. эта программа была утверждена президентом Кеннеди как общенациональная для ликвидации отставания США от СССР в области развития космической техники с выделением достаточно больших ресурсов (ассигнования — около 25 млрд. долларов, разработкой занято около полмиллиона человек).
27 октября 1961 г. с мыса Канаверал был произведен первый успешный пуск ракеты-носителя «Сатурн-1», предназначавшийся для отработки узлов ракеты, доставившей на орбиту Земли рекордную по тем временам массу 10,2 т. Особый интерес представляла вторая ступень, которая использовала криогенные высокоэнергетические компоненты топлива — жидкий водород и кислород. Применение таких пар стало возможным благодаря созданию двигателя RL-10A-3, разработанного фирмой «Рокетдайн» (Rocketdyne) (контракт на разработку был заключен в сентябре 1958 г.). Наращивая мощность ракеты-носителя, последовательно создавая вслед за «Сатурном-1» (первый пуск 27.10.61), «Сатурн-1 В» (первый пуск 26.02.66) и «Сатурн-5» (первый пуск 9.10.67), американские коллеги на последнем носителе обеспечили вывод на низкую орбиту ИСЗ 128 т (включая третью ступень), что позволило обеспечить выведение к Луне массы в 47 т. Это была уже реальная возможность осуществления пилотируемой экспедиции с посадкой человека на Луну.
Применение двигателей, работающих на кислородно-водородном топливе с высокими энергетическими характеристиками, определило схему выведения и траекторию полета экспедиции на Луну. Оптимальной для таких компонентов топлива является схема носителя, использующая для довыведения груза на ОИСЗ часть топлива разгонного блока. Это и было реализовано в программе «Сатурн-5». На третью ступень (разгонный блок) они дополнительно возложили задачу разгона комплекса к Луне. После перестроения комплекса, а именно отделения корабля «Аполлон», разворота его на 180° и перестыковки с Лунным модулем, происходило отделение третьей ступени. Дальнейшие динамические функции, такие как коррекции на орбите, торможение у Луны, отлет обратно к Земле, выполнял сам корабль «Аполлон». По достижении орбиты Луны и перехода экипажа в Лунный модуль, последний самостоятельно осуществлял посадку на поверхность Луны, взлет и стыковку с кораблем «Аполлон». Выполнив свои функции, Лунный модуль отделялся, а корабль «Аполлон» обеспечивал возвращение на Землю спускаемого аппарата с экипажем и «подарками» Луны. Вся схема экспедиции приведена на рисунке 1.
Про «Сатурн-5-Аполлон» много написано. Эта космическая система, безусловно, укрепила национальный престиж США в космосе.
Носитель Н-1 использовал традиционные для ракет ОКБ-1 компоненты: жидкий кислород и керосин. Это требовало трехступенчатой схемы выведения.
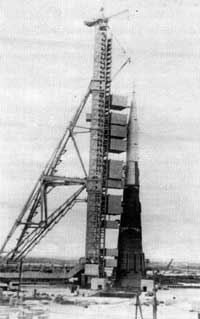 Рис.2. Ракета-носитель Н1 на пусковом устройстве | 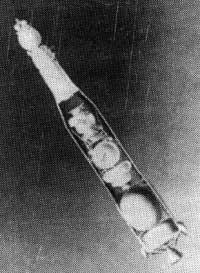 Рис.3. Головной блок Л3 ракеты-носителя Н1 |
Носитель (рис. 2) содержал в себе блоки А, Б и В, а для разгона к Луне использовался специальный ракетный блок Г (рис. 3), который после выдачи разгонного импульса отделялся от комплекса. Ракетный блок Д обеспечивал дальнейший полет к Луне и выход на орбиту искусственного спутника Луны (ОИСЛ). На орбите Луны один из двух членов экипажа переходил через открытый космос из лунного орбитального корабля (ЛОК) в Лунный корабль. После этого Лунный корабль с пристыкованным к нему все тем же ракетным блоком Д отделялся и начинал свое движение к поверхности Луны. Основной тормозной импульс для достижения поверхности отрабатывался блоком Д, после чего блок отделялся и уводился. На высоте около 3 км от точки посадки по команде посадочного радиолокатора ЛК включался ракетный блок Е самого корабля. Обеспечивалось гашение остатков скорости, и после этого начинался посадочный маневр Лунного корабля уже по команде космонавта. Маневр осуществлялся на работающем в режиме глубокого дросселирования (уменьшения) тяги блока Е. По сути дела ракетный блок обеспечивал зависание ЛК над поверхностью и движение его в наиболее благоприятный район при прилунении. Схема с использованием специального блока торможения при посадке более экономична, чем схема с преобразованием этого блока в посадочную ступень, как это было сделано на американском Лунном корабле LEM. Однако ее реализация принесла в дальнейшем много дополнительных проблем, о чем на первом этапе мы и не догадывались. Ракетный двигатель ЛК на заключительном участке посадки, как было сказано, должен был включаться по команде от посадочного радиолокатора «Планета». Радиолокатор имел четыре антенны, лучи которых образовывали в пространстве ассиметричную пирамиду. Три боковых луча допплеровской части системы определяли вектора скорости, а центральный луч давал информацию о расстоянии до поверхности. Схема простая и надежная (в дальнейшем без всяких доработок этот радиолокатор был установлен на беспилотных объектах, доставивших на Луну советские автоматические станции для забора бесценных крупинок лунного грунта), но не обладавшая необходимой защищенностью от мешающих сигналов, отраженных от падающей на небольшом расстоянии первой отработанной ступени.
В авиации и ПВО специалистам хорошо известен термин «эффективная площадь обратного отражения луча» — параметр, характеризующий какой процент энергии облучающего сигнала отражается поверхностью летательного аппарата и возвращается к источнику излучения. На этот параметр существенно влияет конфигурация облучаемого объекта. Для уменьшения отраженного сигнала необходимо применять специальные меры, включающие специальные покрытия поверхности, плавные обводы, исключающие эффект «уголкового» отражателя и т.д. В общем, все то, что связано сегодня с понятием «технологии «Стеллс»».
Мы тогда с этими проблемами столкнулись впервые. Проектанты на первых порах, не особенно задумываясь и опираясь на справочные данные по авиационным летательным аппаратам того времени, заложили этот показатель равным 10 м2. Это типичная «эффективная площадь обратного отражения луча» для небольшого самолета типа «МИГ-17». Габариты первой ступени нашего лунного посадочного комплекса были сопоставимы с самолетом такого класса, и этого на стадии проектирования показалось достаточно. Когда же дело дошло до экспериментальной проверки, оказалось, что фактическое значение этого параметра в нашем случае может достигать 10—100 тыс.м2. Об этом можно было догадаться и раньше, так как сопло двигателя является почти идеальным уголковым отражателем, и, если луч радиолокатора попадает на него, то почти весь сигнал без потерь будет отражен назад. Но сказалась разобщенность специалистов разного профиля. Проблема всплыла, что называется, под занавес, когда конструктивно все элементы комплекса были уже изготовлены. И доработку радиолокатора его разработчики делать отказались. Пришлось поработать баллистикам, чтобы найти решение почти неразрешимой задачи.
И решение было найдено — надо было перераспределить тормозные импульсы первой и второй ступеней Лунного корабля. Но, если с первой ступенью было все ясно — нужно было всего лишь недозаправить баки топливом, не внося изменений в конструкцию, то со второй ступенью было сложнее: нужно было в баки дополнительно влить около 250 кг компонентов, а свободных объемов там не было. Главный конструктор проекта академик В. П. Мишин такую доработку не хотел принимать, так как могут существенно измениться сроки. Спас положение М.К.Янгель, конструкторскому бюро которого было поручено создание ракетного блока Лунной кабины. Изучив наши проблемы, глубоко разобравшись в технической сути предложения, он выступил на Совете главных конструкторов с предложением провести необходимые доработки ракетного блока (речь шла о вставках в топливные баки), по сути не меняя согласованных сроков поставки готовой материальной части. Но это касалось только пилотируемой экспедиции, а что делать на двух ближайших пусках комплекса, которые планировались в 1971 г.? И ракеты и головные блоки лежали в сборочном корпусе практически собранными. Положение складывалось драматическое.
Совещание у заместителя главного конструктора системы управления Лунного комплекса М.С.Хитрика. Жаркий летний день. Около двадцати самых опытных специалистов методом «мозговой атаки» пытаются нащупать выход из, казалось, абсолютно тупиковой ситуации. Уже прошел короткий обеденный перерыв, заканчивается день, все предложения высказаны, обсуждены, а решения нет, как и не было. И тут слово просит молодой инженер-баллистик и робко с мелом у доски излагает, на первый взгляд, совершенно абсурдную идею. Он предлагает не только недотормаживаться на первой ступени, как уже принято для штатного пилотируемого варианта, а наоборот — перетормозиться первой ступенью на 30—40 м/сек. Траектория лунного посадочного комплекса — связка первой, второй ступеней и самой лунной кабины — при этом совершает, образно говоря, «мертвую петлю» (и такой цирковой номер почти у самой лунной поверхности на высоте 3—4 км!). Что это дает? А очень просто — при гашении остаточной скорости на участке прецизионного торможения лунная кабина, а следовательно, и лучи посадочного радиолокатора будут отворачиваться от отделившейся первой ступени дополнительно почти на тридцать градусов, и локатор не схватит отраженный от первой ступени сигнал, в результате нормальное функционирование системы будет обеспечено. То есть вообще не требуется никаких доработок материальной части, а лишь перезакладка в полете «у ставок» на участке торможения. При первом беспилотном пуске запас энергетики на борту для этого имелся. Как все просто! Надо было там присутствовать в эти минуты, чтобы оценить реакцию всех присутствующих и, в первую очередь, хозяина кабинета: удивлялись, что раньше не додумались до этого, шутили на тему, что о нас подумают наши американские коллеги, которые наверняка зафиксируют наш цирк, совершенно непонятный для непосвященного человека — петля Нестерова при посадке на Луну!.. Минуты разрядки прошли, и тут же было подписано решение: делать именно так. Правда, в реальном полете дело до этого не дошло — уже на первых секундах после старта носителя с Земли в очередной раз нас ждало разочарование.
В 1968 году была полностью пересмотрена вся схема полета комплекса Л-3 к Луне. В результате проведенных исследований стала очевидна большая выгода, с точки зрения энергетических затрат, отказа от формирования экваториальной орбиты ожидания и перехода на «плоские» схемы торможения при выходе на ОИСЛ и отлета к Земле после завершения экспедиции. Однако надо было преодолеть одну трудность. Дело в том, что предлагаемая схема могла обеспечить лишь кратковременное пребывание ЛК на поверхности: нельзя было допускать значительного ухода точки посадки из плоскости орбиты лунного орбитального корабля. Была возможность так выбрать точку прилунения, что и спустя заданное время, скажем двое-трое суток, орбита ЛОК подворачивалась и снова проходила через точку посадки, обеспечивая минимальную энергетику на участке взлета и сближения ЛК с ЛОК. Но при этом не было возможности экстренного старта ЛК в случае какой-либо аварийной ситуации — угол между плоскостями орбит ЛК и ЛОК превышал возможности заложенной энергетики на сближение.
Выход был найден. Было решено доработать систему управления ЛК так, чтобы она позволяла производить спуск с орбиты на поверхность Луны и взлет по пространственным траекториям — на техническом жаргоне «стрельба из кривого ружья». Исследования позволили найти приемлемый способ технической реализации этой идеи. Рассматривалось три способа:
— разворот гироплатформы системы управления по углу рыскания по заданной программе на активном участке траектории (боковой маневр);
— наклон гироплатформы системы управления (СУ) после установки ее вертикальной оси и предварительной ориентации по крену (закрутка ЛК);
— отработка программы по углу рыскания, рассчитываемой непосредственно перед стартом.
Остановились, как на самом эффективном, на втором способе. При тех параметрах посадочной и взлетной орбит, которые были выбраны как номинальные, легко достигалось боковое смещение конечной точки этих активных участков на 25—30 км, что было достаточно для обеспечения заданной длительности пребывания ЛК на поверхности Луны и выхода из возможных аварийных ситуаций.
Трудной задачей являлось нахождение способа расчета параметров программы изменения угла тангажа и функционала выключения двигательной установки (ДУ) ЛК при выходе из нештатных ситуаций на участке спуска на поверхность Луны. Известные нам методы терминального управления, как наиболее пригодные для таких задач, не могли быть реализованы на бортовых вычислительных машинах тех лет — слишком мало было для этого их быстродействие. Пришлось пойти по пути аппроксимации предварительно насчитанных наборов изменения параметров систем в зависимости от момента аварии. Метод оказался очень эффективным и был принят к реализации головным разработчиком системы управления ЛК.
Сейчас многие пишут о влиянии политических решений на нашу космическую программу, о приурочивании дат пуска наших космических систем к юбилеям и т.п. И пишут об этом весьма осведомленные люди (см., например, интервью В. П. Мишина в журнале «Огонек» № 34 за 1990 г.). Что ж, вероятно, эти моменты тоже имели место. Но не надо забывать, что события не существуют сами по себе, они ведь всегда окрашены эмоциями конкретных людей и всегда многоплановы. И трудно сказать, где эта история на самом деле «делается» — наверху, в тиши ведомственных кабинетов, или за кульманом конструктора и в заводских цехах. А мы, молодые инженеры, мало зная о проблемах главных конструкторов, понимая всю грандиозность задуманного, чувствовали себя первооткрывателями и страшно гордились своей работой, оказанным доверием и искренне хотели быть первыми. Жаркие споры велись о том, кому сколько машинного времени выделят на ближайшую ночь — тогда электронные вычислительные машины были еще у нас в диковинку — и, пожалуй, нам одним из первых довелось почувствовать вкус к работе со скоростью (сегодня при десятках и сотнях миллионов смешно вспоминать) 20 тысяч операций в секунду.