
В. П. ПЕТРОВ,
кандидат технических наук.
Рис. В. Буравлева.
| М |
Чтобы этого не произошло, оси ИСЗ следует ориентировать в каком-то определенном направлении. Но решение подобной задачи оказывается чрезвычайно сложным. Прежде чем рассказать о том, как можно ориентировать спутник и для чего нужна эта ориентация, мы кратко познакомим читателя с проблемой полета свободного тела.
Свободным телом можно назвать такой предмет, который, образно выражаясь, может как угодно кувыркаться в пространстве и перемещаться вверх, вниз, вправо, влево, вперед и назад. Если же подойти к определению более точно, то это предмет любой формы, который под влиянием начальных или внешних возмущений может свободно перемещаться в пространстве и вращаться вокруг своих осей.
Как же предотвратить эти вращения, как ориентировать свободное тело в пространстве? Для этого, естественно, надо прежде всего выбрать в пространстве соответствующие неподвижные ориентиры. Опираясь на них, можно отсчитывать, или, как говорят, определять, величину углового отклонения оси свободного тела относительно выбранного опорного тела. Подобными ориентирами могут быть, например, небесные светила: Солнце, Луна, яркие звезды, — а также Земля, земное магнитное поле и т. п.
Угловая ориентация свободного тела в пространстве бывает полной и частичной. В первом случае предотвращается вращение свободного тела относительно всех трех его осей. Ориентация же его главной оси относительно какого-либо опорного тела в мировом пространстве называется частичной. Под главной осью свободного тела подразумевается прямая, проходящая через его центр инерции и направленная на опорное тело.
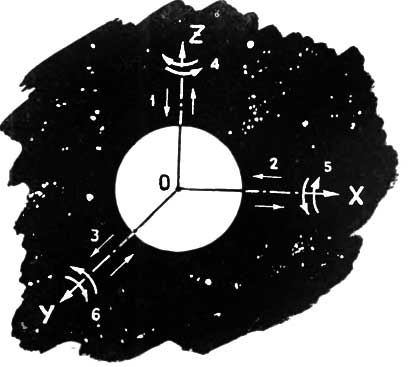 Свободное тело и его степени свободы: О — центр инерции; 1. 2, 3 — линейные перемещения тела вдоль осей ОZ, ОХ, ОУ; 4. 5, 6 — вращение тела вокруг жестко связанных с ним осей. |
Читателю нетрудно представить себе свободно летящее тело. Им может быть снаряд после выхода его из канала ствола орудия; самолет или ракета, летящие с выключенным двигателем; искусственный спутник Земли после выхода его на орбиту или высотный контейнер (после отделения его от ракеты-носителя), запускаемый в верхние слои атмосферы для геофизических наблюдений.
Как же происходит полет свободного тела? Если у тела нет начальной скорости и на него действует переменная сила сопротивления воздуха (или воды), то оно совершает свободное падение, направленное к центру Земли. Иначе говоря, такое падение обусловлено земным притяжением.
Если же свободное тело падает с небольшой по сравнению с радиусом Земли высоты, то движение его под действием постоянной силы тяжести и переменной силы сопротивления воздуха будет происходить по вертикальной прямой, соединяющей начальное положение тела с центром Земли.
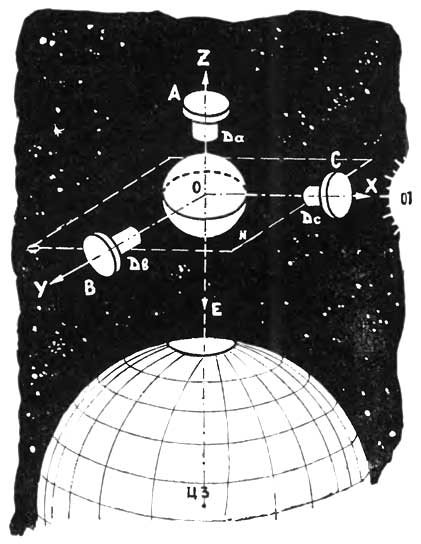 Полная ориентация свободного тела в пространстве: О — центр инерции свободного тела; ОХ, ОУ, OZ — оси свободного тела, жестко связанные с ним; ОТ — опорное тело; Л, В, С — маховые массы на осях свободного тела; Да, Дв, Дс — двигатели, приводящие в движение маховые массы; ОЕ — вертикаль, направленная к центру Земли; N — плоскость истинного горизонта в пространстве; ЦЗ — центр Земли. |
В таких условиях как раз и находится сферический контейнер с приборами, забрасываемый геофизической ракетой в верхние слои атмосферы. В начале своего падения, в безвоздушном пространстве и затем при входе в плотные слои атмосферы он испытывает различное ускорение.
Свободное тело может испытывать в полете различные возмущения или толчки, которые будут влиять на условия его передвижения. К числу их можно отнести начальные возмущения (угловые скорости), получаемые при отделении, например, сферического контейнера или искусственного спутника Земли от ракеты-носителя; внешние импульсные возмущения: удары метеоритов, вращающие моменты от трения корпуса спутника о более плотные слои атмосферы в перигее и другие. Только имея точные данные о таких возмущениях, то есть зная, с какой скоростью будет вращаться ИСЗ в пространстве под влиянием указанных причин, можно создать надежную и экономичную систему его ориентации.
Полностью ориентированных спутников еще нет. Подобно маленькому ребенку, который еще только начинает подчинять движения своему желанию, наш спутник «учится ходить». Впервые в мире на третьем советском спутнике установлен магнитометр, измерительный датчик которого автоматически ориентируется, используя для этого влияние земного магнитного поля. Два других датчика позволяют определить положение корпуса спутника относительно земного поля и скорость вращения ИСЗ вокруг собственных осей. Эти весьма важные данные, которые до сих пор нельзя было получить, позволяют построить в любой плоскости ориентируемый спутник.
Ответить на этот вопрос нетрудно, ибо угловая ориентация искусственных спутников Земли и геофизических контейнеров позволяет более полно и эффективно решить целый ряд научных и практических задач по исследованию Солнца, верхних слоев атмосферы, электрических полей, микрометеоритов, магнитного поля Земли. Ориентация необходима и для фотографирования земной поверхности, возвращения спутника на Землю, навигации морских судов, самолетов и будущих межпланетных кораблей.
Известно, например, какое важное место среди этих проблем занимают исследования Солнца с помощью искусственного спутника Земли. Для решения такой задачи одна из осей ИСЗ должна быть постоянно ориентирована на Солнце. Например, при изучении рентгеновского участка солнечного спектра соответствующие приборы, размещенные па искусственном спутнике, должны быть постоянно ориентированы на Солнце в течение определенного времени с различной степенью точности. Если не ограничиваться получением некоторых интегральных характеристик этого излучения, а фотографировать весь солнечный спектр, то требуемая точность ориентировки ИСЗ на Солнце резко возрастает. Такая же высокая точность ориентировки приборов на Солнце нужна при фотографировании солнечной короны и зодиакального света. В этом случае следует дополнительно обеспечить отсутствие вращения научных приборов относительно ориентируемой па Солнце оси искусственного спутника Земли, иначе говоря, необходима полная ориентация спутника; одна его ось должна точно смотреть на Солнце, в то время как другая ось должна быть постоянно направлена к центру Земли. Если бы мы могли знать положение этой оси по отношению к земной поверхности, то появилась бы возможность с борта спутника фотографировать расположенные на нашей планете объекты, а также решать любые другие научные и практические задачи.
Частичная ориентация свободного тела в пространстве: О — центр инерции; 1 — свободное тело сферической формы (первый советский ИСЗ); 2 — свободное тело конической формы (второй и третий ИСЗ); ОТ — опорное тело в мировом пространстве; ОХ — ориентируемая ось: OZ — ось, перпендикулярная плоскости ХОУ. | 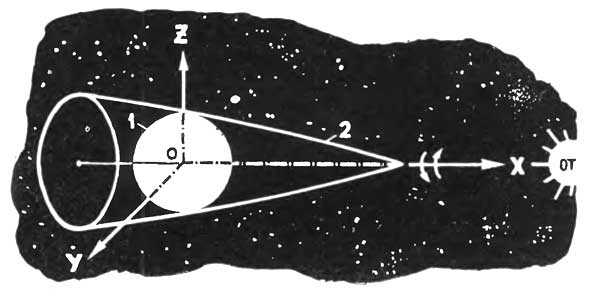 |
Таким образом, не только спутник, но и почти все установленные на нем приборы для научных наблюдений требуют для своей работы ориентировки в течение длительного времени относительно различных опорных тел, расположенных в мировом пространстве. Относится это и к солнечной батарее, которая для превращения солнечной энергии в электрическую должна быть ориентирована в направлении на Солнце во время движения искусственного спутника Земли.
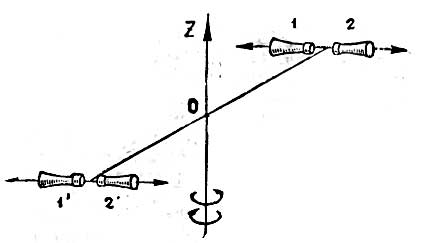 Поворот свободного тела в пространстве с помощью реактивных сопел: О — центр инерции 1—2, 1' и 2' — реактивные микродвигатели, осуществляющие поворот свободного тела вокруг его оси OZ. |
Как известно, источником энергии на ИСЗ и космических кораблях могут служить специальные малогабаритные аккумуляторы. Однако незначительная их емкость сильно ограничивает срок «активной жизни» спутника. Это подтвердил, в частности, опыт первых наших, а затем и американских ИСЗ. Поэтому уже на третьем спутнике в качестве источника питания начали применяться солнечные батареи, собранные из кремниевых фотоэлементов. Применение солнечных батарей, как известно, обеспечило рекордно длительную работу радиостанции «Маяк», установленной на борту третьего советского спутника. На третьем советском спутнике солнечные кремниевые батареи располагаются на его поверхности по окружности в носовой части и на съемном заднем днище корпуса спутника. Такое расположение батарей обеспечивает наиболее вероятное их облучение солнечными лучами при отсутствии общей ориентации корпуса спутника на Солнце.
Когда самолет или ракета летят в атмосфере, то их положение в пространстве можно, как известно, изменить с помощью руля, элеронов или интерцепторов, которые управляются от автопилотов с применением гироскопических узлов и различных маятниковых приборов.
В условиях же полета спутника такие приборы не будут действовать, так как аэродинамические рули в безвоздушном пространстве беспомощны, а приборы, действие которых основано на использовании маятникового эффекта (то есть силы тяжести), в условиях ' невесомости также бесполезны. Как же в таком случае быть?
Ученым удалось найти способ изменения положения осей спутника относительно Земли, Солнца, Луны, звезд и т. п., и даже не один, а два!
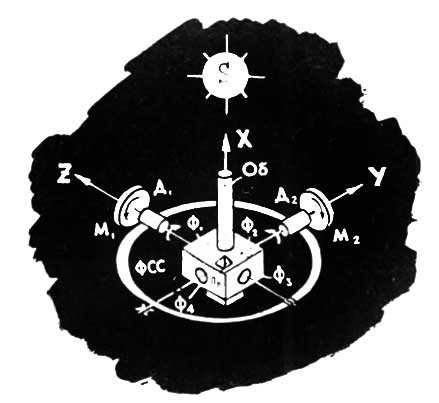 Кинематическая схема системы ориентации свободного тела на светило: ФСС — фотоследящая система, формирующая управляющий сигнал; Ф1, Ф2, Ф3 и Ф4 — фотоэлементы фотоследящей системы; Д1 и Д2 — двигатели, управляемые от усилителя ФСС; М1 и М2 — маховые массы, вращаемые внутри свободного тела относительно его осей ОУ и OZ; S — светило (Солнце); Пр — четырехгранная призма, отбрасывающая часть света на какой-либо фотоэлемент при отклонении ориентируемой оси X от направления на светило; Об — объектив фоточувствительного блока. |
Угловая ориентация ИC3 может быть осуществлена прежде всего с помощью маленьких реактивных двигателей, у которых газовые струи направлены в разные стороны по отношению к осям спутника. Подобный способ уже давно применяется, в частности, для стабилизации геофизической ракеты, летящей в стратосфере.
Второй способ ориентации спутника осуществляется с помощью вращающихся маховиков или, как говорят специалисты, с помощью так называемых инерционных масс, располагаемых на осях спутника. Его предложил еще К. Э. Циолковский. Способ основан на одном из классических законов механики, открытых около двухсот лет тому назад Ньютоном. Это широко известный в механике «закон сохранения главного момента количества движения».
Для ориентировки одной из трех осей спутника необходимо поместить в его корпусе на двух других осях по маховичку, которые будут вращаться двигателями относительно своих осей с определенными угловыми скоростями. Их вращение при этом должно быть направлено в сторону, обратную движению корпуса спутника, и в этом случае вращение ИСЗ вокруг двух его осей прекратится. Маховички, правда, будут продолжать вращаться внутри корпуса спутника с постоянной скоростью; величина ее будет тем больше, чем быстрее вначале вращался корпус спутника вокруг этих двух осей, то есть чем больше была его начальная угловая скорость. Маховички, согласно указанному закону, так сказать, «забирают» в себя ту угловую скорость, которую имел корпус спутника, например, при отделении его от ракеты-носителя. Если же ИСЗ не имел начальной скорости вращения, а его главная ось была лишь отклонена на какой-то угол от направления на ориентир, то после того как маховички «отработают» этот угол, они уже дальше вращаться не будут.
Таким способом можно остановить в безвоздушном пространстве вращение корпуса спутника, если оно имеется, и повернуть ИСЗ на желаемый угол, то есть осуществить угловую его ориентацию относительно Земли, Солнца, магнитного поля Земли и т. п.
Очевидно, что реальная система стабилизации спутников будет сочетать в себе два вышеуказанных способа. С одной стороны, может быть использована система реактивных сопел, способных устранять большие возмущающие моменты, то есть большие угловые скорости вращения ИСЗ вокруг его осей, а с другой стороны, инерционные массы, с помощью которых удастся осуществить весьма точную стабилизацию ИСЗ.
Сигнал, который заставляет маховички (то есть стабилизирующие элементы ИСЗ) вращаться в определенную сторону с определенной скоростью, создается системой астроориентировки. Система астроориентировки состоит из сложного комплекса гироскопических и астрономических узлов. Подобные системы, называемые астронавигационными, применяются уже в ракетах, полет которых по определенному заданному курсу осуществляется при помощи различных ориентиров, например, небесных светил. За положением светил зорко наблюдают «глаза» ракеты — астрономические приборы. Стоит ракете под влиянием какой-либо причины сбиться с курса, как в тот же момент это отклонение с помощью электронных приборов автоматически вычисляется, и к механизмам, которые управляют рулями, поступает сигнал, заставляющий ракету возвратиться на прежний курс. Таким образом, ракета с астронавигационной системой управления сама прокладывает и рассчитывает свой курс, ориентируясь по заранее выбранным звездам.
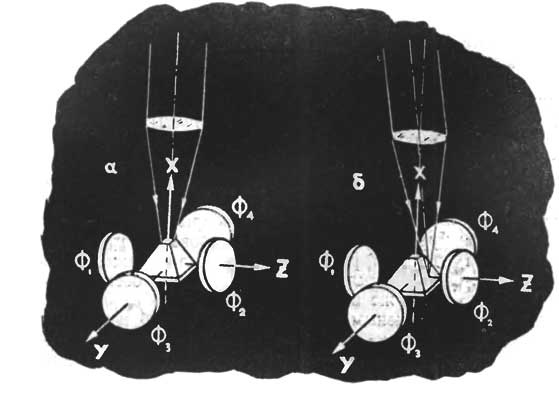 | Четырехгранная пирамида, распределяющая луч света на фотоэлемент. При отклонении ориентируемой оси X от направления на светило луч света отражается от пирамиды, засвечивая фотоэлемент, который подает сигнал на усилитель, управляющий двигателем. |
А как же спутник? Как и ракета, он должен сохранять строго определенное положение в полете, автоматически определять свое положение в пространстве и по отношению к географическим координатам Земли. Для этой цели будет служить сложная автоматическая фотоследящая система ориентации спутника за выбранными звездами-ориентирами. Оптическая ее часть предназначена автоматически следить за этими звездами, непрерывно определяя местоположение спутника относительно земных географических координат. С помощью этой системы будут вырабатываться также сигналы, управляющие вращением маховичков, а через них и поворотом корпуса спутника относительно жестко связанных с ним осей.
| Схема устройства для стабилизации ИСЗ: система координат X, У, Z жестко связана с ИСЗ. Ось X непрерывно ориентируется по направлению на Солнце. Ось магниточувствительного элемента (ОМЧЭ) закрепляется параллельно оси Z. При отклонении оси У от плоскости, определяемой векторами S и Т на МЧЭ будет действовать проекция вектора Т на ось Z. В результате на выходе магниточувствительного элемента появится сигнал, который после усиления и преобразования подается на двигатель D, вращающий маховую массу М. Вращение последней обеспечивает поворот ИСЗ вокруг оси X до тех пор, пока ось У не установится в плоскости (S, Т). | 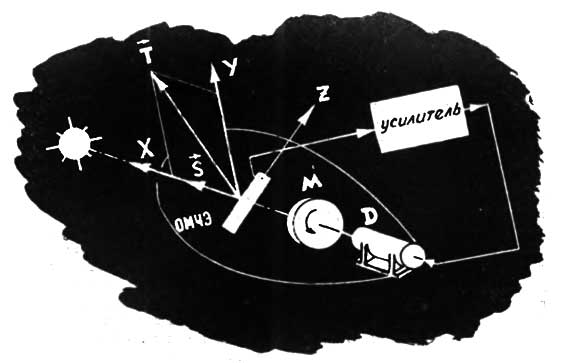 |
 Блок-схема системы автоматического регулирования ориентации свободного тела на светило (Солнце). |
Питание же электродвигателей, которые вращают маховички внутри корпуса спутника, поступает от солнечной или аккумуляторной батареи, в зависимости от того, падает ли в данном случае на него солнечный свет или он экранирован Землей.
Регулируемой величиной в автоматической ориентации ИСЗ, например, на Солнце, является отклонение оси от направления на Солнце. Очевидно, что в качестве чувствительного к этому отклонению элемента можно взять фотоэлектрический элемент, который вырабатывает управляющий сигнал, пропорциональный этому отклонению.
Для решения задачи ориентации спутника на Солнце, как было выше выяснено, надо осуществить вращение ИC3 вокруг двух его осей.
Конструктивно эту задачу можно решить следующим образом. С помощью чувствительного блока фотоследящей системы определяется угол рассогласования ориентируемой оси с направлением на Солнце. При этом чувствительный блок вырабатывает управляющий сигнал, который усиливается и подается на стабилизирующие элементы (то есть маховички). Последние так изменяют момент количества движения системы, чтобы ориентируемая ось снова совпадала с направлением на Солнце. В качестве чувствительного блока системы ориентации в зависимости от выбранного типа ориентира может быть применен магниточувствительный датчик, или фотоэлектрический блок, или, наконец, гироскоп, который не нуждается в пространственном ориентире, ибо его ось всегда старается сохранить неизменным заданное относительно мирового пространства положение. Однако ось любого гироскопа вследствие трения со временем уходит от заданного направления. Кроме того, значительный вес, размеры и ограниченность запаса источников питания делают иногда нерентабельным его использование на ИСЗ. Правда, для временной ориентации гироскоп может быть применен и на спутнике, например, для удержания какой-либо оси спутника в направлении на Солнце или звезды при временной их потере в процессе работы фотоследящей системы.
Что же касается магниточувствительного датчика, то, как известно, такой элемент уже используется для целей ориентации магнитометров на третьем советском спутнике.
Самым перспективным является применение на ИСЗ фотоэлектрического элемента, так как, имея малые габариты и вес, что весьма существенно для условий спутника, он может обеспечить высокую точность ориентации.
Как мы уже отмечали, на третьем ИСЗ установлен магнитометр, измерительный датчик которого автоматически ориентируется по направлению полного вектора земного магнитного поля. Два потенциометрических датчика, помещенных на узле ориентации, позволяют определить положение корпуса спутника относительно земного поля и скорость вращения ИСЗ вокруг собственных осей.
Эти важные данные дают возможность оцепить начальные угловые скорости ИСЗ и, учитывая их, построить любой полностью ориентируемый спутник, а также решить проблему его возвращения на Землю.
Угловая ориентация искусственных спутников Земли имеет, таким образом, большое значение для создания будущих более совершенных, возвращаемых на Землю спутников и межпланетных кораблей.