Желательно смотреть с разрешением 1280 Х 800
ШТУРМАНЫ КОСМОСА |
ИНЕРЦИАЛЬНАЯ НАВИГАЦИЯ
В. ОРЛОВ, инженер
Рис. Е. БОРИСОВА
| З |
НАЕТЕ ЛИ вы, почему морская единица скорости называется «узел»? Так же как и некоторые другие названия физических величин, этот термин обязан своим происхождением способу измерения. Во времена парусников для определения скорости судна бросали в воду лаг — поплавок с килем, оказывающим столь сильное сопротивление, что его можно было считать находящимся в неподвижной точке позади корабля. Затем отпускали прикрепленную к лагу веревку с узлами, расположенными на равных расстояниях друг от друга, и, глядя на стрелку хронометра, отсчитывали узлы на разматывающейся веревке. Они-то и дали название единице скорости, принятой в морском обиходе.
Название это сохранилось до наших дней, хотя лаги употребляются совсем другие: корабль буксирует небольшой пропеллер, увлекаемый течением воды. Пропеллер вращает небольшую динамо-машину, которая вырабатывает электрический ток, отклоняющий стрелку амперметра. Отклонение стрелки пропорционально скорости корабля.
Зная в любой момент времени скорость корабля, штурман может определить и его местонахождение. Для этого он от точки, обозначающей на карте последнее географическое положение корабля, проводит черту в направлении его курса. Если корабль идет со скоростью 25 км/час, то через час он проведет черту, равную 25 км в масштабе карты. Если к концу второго часа курс и скорость корабля не изменились, то штурман продолжает свою черту на ту же самую длину. Когда корабль меняет свой курс, то, начиная с этого момента, штурман проводит черту в соответствии с новым курсом. Учитывает он и изменение величины скорости, указываемое лагом.
Эта система морской навигации называется «плаванием по счислению». В принципе она позволяет плыть без географических ориентиров, без определения местоположения по небесным светилам и, наконец, без помощи радиосредств.
Определение скорости и местонахождения — основная задача всякой навигации; морской, воздухоплавательной, космической. Для решения этой задачи корабли, самолеты и ракеты имеют свои «глаза» — приборы наблюдения за небесными светилами и звездами (астронавигация), и «уши» — аппаратуру, принимающую сигналы наземных радиопередатчиков (радионавигация).
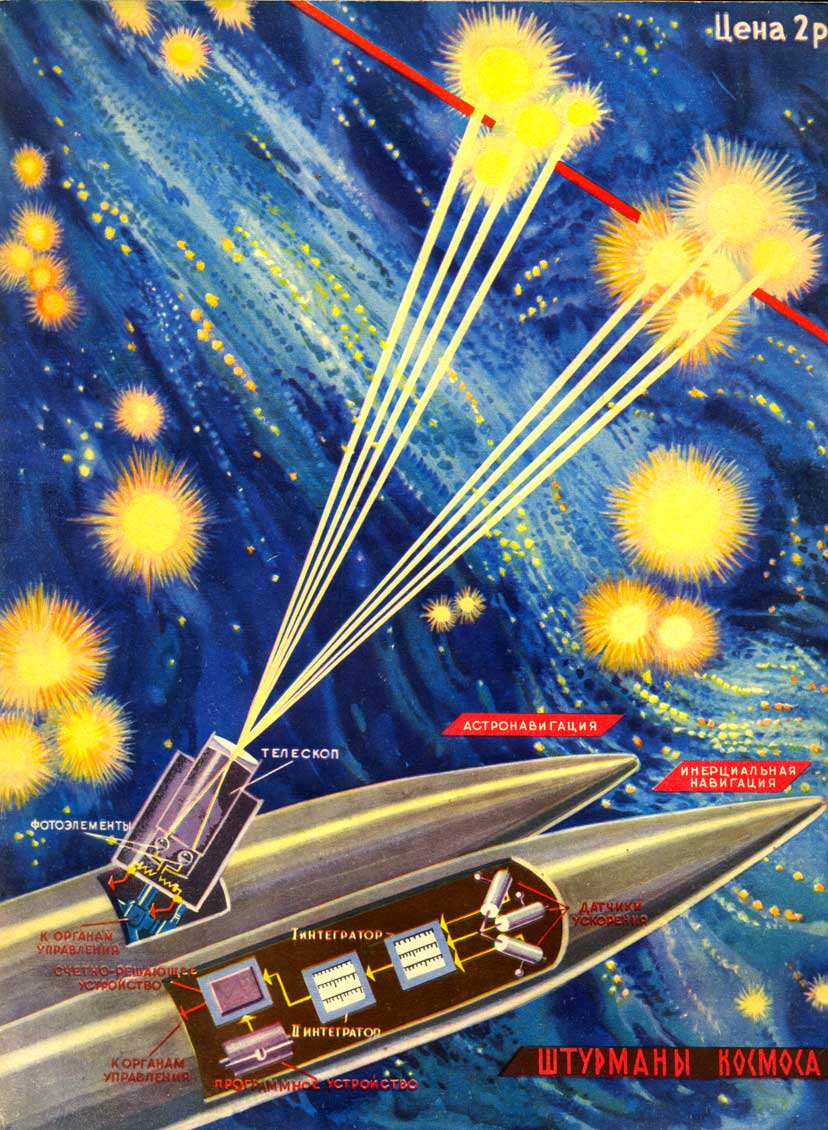
О некоторых системах радионавигации рассказывалось в № 11 журнала «Техника — молодежи» за 1958 г. Астронавигационная система основана на ориентации летательного аппарата по звездам (см. 4-ю страницу обложки).
Хотя эти системы широко применяются, они все же имеют свои недостатки. По звездам можно ориентироваться только ночью, светила часто бывают закрыты облаками, осуществлению надежной радиосвязи могут препятствовать различные помехи и шумы.
Поэтому система, которая решала бы навигационную задачу одними внутренними средствами, так сказать — только с помощью своих «ощущений», в ряде случаев имела бы перед астро — и радионавигацией большие преимущества. Решать навигационную задачу внутренними средствами — это значит непрерывно определять скорость и местонахождение движущегося объекта с помощью аппаратуры, которая, во-первых, работает без использования каких бы то ни было внешних ориентиров и, во-вторых, помещается только на самом движущемся объекте.
Система навигации, снабженная такой аппаратурой, решает навигационную задачу совершенно самостоятельно, а потому она называется автономной.
Представим себе пассажира, едущего в поезде. Является ли система пассажир — вагон автономной? Нет, потому что она не удовлетворяет ни первому, ни второму из поставленных выше условий. Ведь пассажир может определять скорость вагона по перемещению окружающего пейзажа, то есть используя внешние ориентиры, и, кроме того, по стуку колес, а это означает, что часть необходимой аппаратуры (в данном случае рельсы) находится вне движущегося объекта.
Но допустим, что окна вагона наглухо закрыты шторами и что поезд идет по сплошным, непрерывным рельсам. Тогда пассажир мог бы для определения своего местонахождения пользоваться системой «плавания по счислению», если бы он умел определять свою скорость. Но как это сделать в новых условиях?
Единственная характеристика движения, которая теперь может быть обнаружена, а следовательно и измерена пассажиром, — это ускорение. Ускорение возникает всякий раз, когда скорость поезда почему-либо изменяется. При этом любое тело, находящееся в вагоне, испытывает действие силы инерции, пропорциональной его массе и ускорению или замедлению (отрицательному ускорению), — иначе говоря, быстроте увеличения или уменьшения скорости.
Простейшим измерителем ускорений, или акселерометром, может служить небольшая тяжелая тележка, перемещающаяся по направляющим вдоль градуированной шкалы. Тележка должна быть снабжена пружиной, которая при отсутствии ускорения возвращает ее в исходное положение. Если поезд движется прямолинейно, то одной такой тележки достаточно для определения ускорения.
Если поезд движется по прямому пути равномерно-ускоренно, то есть с постоянным ускорением, равным, например, 0,1 м/сек за секунду (0,1 м/сек2) в течение 100 сек., то это значит, что поезд достиг скорости 0,1 м/сек2 X 100 сек. = 10 м/сек, или 36 км/час. Если ускорение поезда не остается постоянным, то интервал времени может быть разбит на столь малые промежутки, в течение которых ускорение практически будет оставаться неизменным. Умножая величины ускорений на соответствующие им промежутки времени и непрерывно складывая результаты, другими словами, производя интегрирование ускорения по времени, можно и в этом случае вести непрерывное вычисление скорости поезда. Приборы, которые осуществляют такое вычисление механическим или электрическим способом, получили название интеграторов. Когда ускорение прекращается, интегратор продолжает показывать постоянное значение скорости, достигнутое к этому моменту.
Для определения пройденного поездом пути наш пассажир закрытого купе вагона может и не прибегать к системе «плавания по счислению». Эту задачу за него также выполнит прибор — второй интегратор. Ведь для определения пути по скорости необходимо произвести ту же операцию интегрирования, что и при вычислении скорости по ускорению.
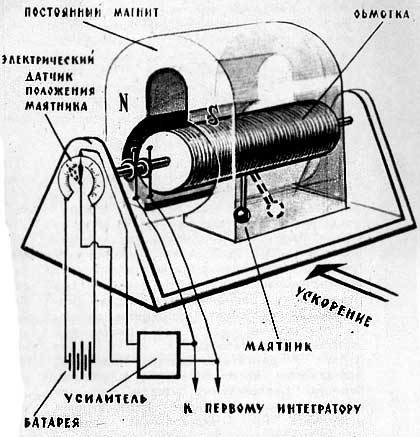 Существуют различные типы акселерометров. Здесь показан акселерометр маятникового типа, работающий по принципу «электрической пружины». Отклонение маятника, вызванное появлением ускорения, регистрируется электрическим датчиком положения. Возникающий при этом ток усиливается и поступает в обмотку барабана акселерометра, где возникает электромагнитное усилие, стремящееся вернуть маятник в первоначальное положение. В роли пружины здесь выступает электромагнитное поле. Ток в обмотке пропорционален действующему ускорению. Он направляется в первый интегратор для определения скорости. |
Такова идея создания автономной навигационной системы. Основным прибором в ней является акселерометр — измеритель ускорений, в работе которого используется свойство инерции, присущее любому телу. Поэтому и всю систему приборов называют системой инерциальной навигации. Она может быть применена на любом движущемся объекте: подводной лодке, самолете, ракете, межпланетном корабле. Только для этого
Изошутка В. КАЩЕНКО Бип-Бип: Если в космосе много метеоров, то можно устроить метеорный парус...  |
Полет ракеты или межпланетного корабля по желаемой траектории можно полностью автоматизировать. Для этого необходимо снабдить их программным устройством, в которое заложены все параметры требуемой траектории и необходимая скорость движения по ней. Автоматизация управления полетом ракеты дополняется счетно-решающим устройством, где происходит сравнение фактических скорости и координат движения ракеты с программными. Счетно-решающее устройство вырабатывает и посылает рулям и двигателю ракеты команды, исполнение которых ведет к уничтожению расхождения между фактическими и программными параметрами движения. Так инерциальный навигатор-автомат может вести ракету по любой заранее рассчитанной траектории.
Принципы инерциальной навигации известны уже около пятидесяти лет. Примерно столько же лет назад были сконструированы первые, хотя и несовершенные, акселерометры. Интеграторы применялись в технике уже в 30-х годах.
Однако создание действующей системы наталкивалось на огромные трудности.
Основная трудность заключалась в том, что при движении объекта в поле земного притяжения акселерометры направлений север — юг и восток — запад должны быть расположены строго горизонтально. В противном случае они будут измерять не только ускорения летательного аппарата, но и какую-то составляющую ускорения свободного падения, вызываемого притяжением Земли. Это приводит к большим ошибкам в определении местоположения.
Расчеты показывают, что при отклонении осей акселерометров от горизонтального положения всего на одну шестидесятую долю градуса ошибка в определении пройденного пути к концу одного часа полета достигает 18,5 км. Это обстоятельство предъявляет необычайно высокие требования к приборам, создающим искусственный горизонт.
Впервые оригинальные пути решения этой проблемы с помощью специальных гироскопических устройств были предложены в 1932 году советским инженером Евгением Борисовичем Левенталем. Но и тогда точность работы этих устройств еще далеко не удовлетворяла тем большим требованиям, которые предъявляются к оборудованию систем инерциальной навигации.
Потребовались многие годы развития как теории, так и технологии изготовления приборов, чтобы приблизиться к созданию реально действующих систем. Сейчас система инерциальной навигации не является уже простой математической абстракцией, имеется ряд образцов инерциальных систем различной формы и размеров, конкурирующих между собой в смысле точности.
Нет никакого сомнения в том, что инерциальные системы управления имеют большое будущее. Немалую роль они сыграют и в освоении космоса. Их развитие вовсе не зачеркивает систем астро — и радионавигации. Наоборот, они будут еще больше совершенствоваться. Вместе с тем их применение в качестве корректирующих устройств позволит намного уменьшить ошибки в работе инерциальных систем.
4-я стр. обложки