«Техника-молодежи» 1981 №3, с.34-35
| Историческая серия «ТМ» ПЕРВЫЕ УПРАВЛЯЕМЫЕ | Под редакцией: Героя Социалистического Труда, академика В. П. МИШИНА; дважды Героя Советского Союза, летчика-космонавта СССР В. В. АКСЕНОВА. Коллективный консультант: Государственный музей истории космонавтики имени К. Э. Циолковского | Рис. Михаила Петровского.
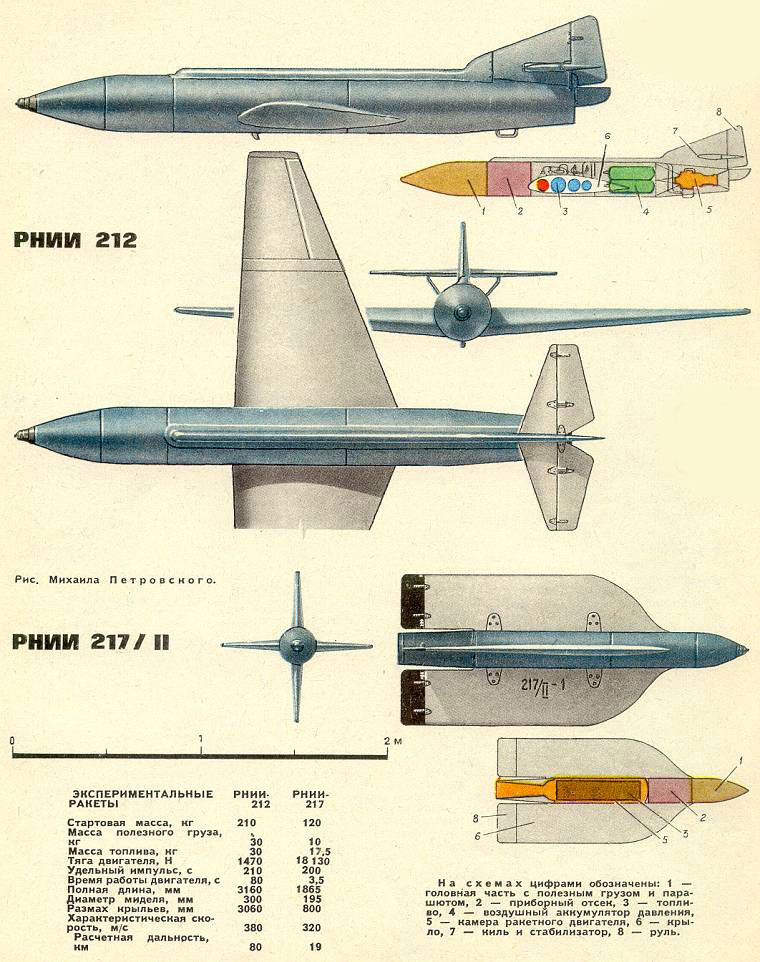
| На схемах цифрами обозначены: 1 — головная часть с полезным грузом и парашютом, 2 — приборный отсек, 3 — топливо, 4 — воздушный аккумулятор давления, 5 — камера ракетного двигателя, 6 — крыло, 7 — киль и стабилизатор, 8 — руль. |
Одна из основных проблем, с которой столкнулись конструкторы первых ракетных летательных аппаратов (РЛА), — обеспечение устойчивости их полета по заданной траектории. Стабилизация с помощью хвостового оперения, дававшая пороховым ракетным снарядам хотя и не очень высокую, но приемлемую точность полета, здесь была совсем малоэффективна. Поэтому уже К. Э. Циолковский говорил о необходимости создания автоматических систем управления для ракет. Прекрасно понимая важность решения этой задачи, С. П. Королев еще до ГИРДа уделил много внимания изучению только появившихся тогда автопилотов.
Поначалу, когда пионеры ракетной техники были уверены, что сначала будут созданы ракетопланы, они сосредоточивали все силы на разработке ракетных двигателей, оставляя вопросы автоматического управления на будущее. Но трудности в создании двигателей привели к тому, что начинать пришлось с небольших беспилотных ракет. Первые же их запуски показали, что проблема управления для ракетостроения не менее актуальна, чем создание надежных, легких и экономичных реактивных двигателей. Правда, двигатели ракетчикам приходилось разрабатывать самим, а автоматическими системами управления занимались уже существовавшие специализированные организации, куда и обратились гирдовцы. Однако специалисты авиационного приборостроения, ознакомившись с техническим заданием на разработку гироскопического автомата для ракеты, категорически заявили, что в таких малых габаритах создать требуемый прибор они не могут, да скорее всего это и вообще невозможно. Королев понял, что решать задачу нужно самим. Когда попытки привлечь в коллектив опытного прибориста не удались, он направил на стажировку в приборный НИИ только что пришедшего в ГИРД молодого инженера С. А. Пивоварова. Ему и было суждено вскоре стать конструктором первых советских приборов управления ракетами.
Создание управляемых ракет происходило уже в РНИИ при активном участии инженеров Е. С. Щетинкова, Б. В. Раушенбаха, М. П. Дрязгова и других. На основе гирдовской крылатой ракеты 06 была разработана ракета 06/II с гироавтоматом, стабилизирующим полет в одной плоскости. Она успешно летала, совершая петли Нестерова, иногда по нескольку штук в одном полете. Затем была построена крылатая ракета ближнего действия 216 с кислородно-спиртовым ЖРД 02 конструкции Цандера — Душкина, которая совершила в 1936— 1937 годах четыре полета. Ее автомат стабилизировал полет уже в двух плоскостях. Следующей стала крылатая ракета дальнего действия 212 с азотнокислотно-керосиновым ЖРД ОРМ-65 конструкции В. П. Глушко. Эта машина может рассматриваться как первый типичный образец современной ракетной техники, поскольку она имела все основные системы, присущие управляемым РЛА, стабилизировалась по всем трем плоскостям и была рассчитана на покрытие расстояния, на порядок превышающего дальность всех разрабатывавшихся тогда неуправляемых ракетных снарядов. Ракета была выполнена по нормальной самолетной схеме. В ее приборном отсеке располагался гироскопический автомат стабилизации ГПС-3 конструкции Пивоварова, состоявший из двух гироскопов, воздушных коробок, скоростного прибора с анероидными коробками, золотниковой системы, аретира, рулевых машинок и системы обратной связи. Топливные баки располагались в крыле, а баллоны со сжатым воздухом для системы подачи топлива и работы системы управления — в задней части фюзеляжа перед двигателем. Старт ракеты производился с помощью ракетных салазок, разгоняемых по рельсовому пути мощным пороховым двигателем. Таким образом, ракета 212 примечательна еще и тем, что в ней впервые слились воедино достижения разных направлений советского ракетостроения, возникшие в ГИРДе и ГДЛ.
Большим достижением ГДЛ было создание пороховых ракетных двигателей на высокоэффективном бездымном порохе. Несколько проигрывая ЖРД в удельном импульсе, они оставались чрезвычайно простыми и этим не могли не привлекать конструкторов. С их помощью в РНИИ решили провести широкие исследования по выбору аэродинамической компоновки РЛА, для чего была разработана серия малых крылатых пороховых ракет — «объект 48». Эти неуправляемые ракеты, прежде чем удалось с помощью конструктивных и технологических ухищрений заставить их летать достаточно точно, выполняли в полете самые разнообразные, зачастую неожиданные эволюции.
Королев умел из всякого, даже заведомо вредного свойства, проявившегося при испытании новой техники, извлекать пользу. В беспорядочных маневрах неуправляемых ракет он увидел возможность создать для ПВО «воздушную торпеду», которая легко могла бы догнать любой самолет. И такая машина была разработана в 1936 году, причем сразу в двух вариантах: 217/I — по самолетной схеме и 217/II — по симметричной четырехкрылой схеме, типичной для зенитных управляемых ракет нашего времени. Успехи приборного сектора РНИИ во главе с Пивоваровым привели к тому, что за решение проблемы взялись и приборные организации: для ракеты 217 систему управления по лучу прожектора, освещающего цель, разрабатывал уже институт телемеханики.
Опыт разработки первых управляемых ракет привел к появлению новых проектов: управляемой баллистической ракеты 609/II и воздушной торпеды 301 с системой радиоуправления конструкции профессора А. Ф. Шорина, запускаемой с самолета по наземным и воздушным целям.
Таким образом, в предвоенные годы в стенах РНИИ на уровне экспериментальных образцов была разработана стройная система ракетного вооружения, включающая машины всех основных типов, занявших в 50-е годы постоянное место в армиях развитых государств. Причем все входившие в эту систему РЛА были отработаны на стендах, а ракеты 212 и 217 совершили в 1939 году по нескольку полетов. Но в условиях надвигающейся войны эти работы, требующие огромной затраты сил и средств, были приостановлены. Полученный опыт показал, что общий уровень техники во всем мире еще не позволяет сделать управляемые ракеты эффективным оружием широкого применения. И хотя были сведения, что Германия продолжает подобные работы, в СССР было принято решение все силы специалистов ракетного дела сосредоточить на создании пилотируемых перехватчиков и многозарядных установок для массированной стрельбы неуправляемыми ракетными снарядами. Это решение привело к своевременному появлению на фронте знаменитых «катюш».