«Техника-молодежи» 1992 г. №11, с.2-3
Инженерное обозрение
Виктор ШИТАРЕВ,
наш спец. корр.
...Руководители аварийно-восстановительных работ были в отчаянии. Высокий уровень радиоактивного заражения местности близ 4-го энергоблока Чернобыльской АЭС приводил к тому, что спасатели (даже в специальных защитных костюмах) могли находиться в опасной зоне не более нескольких десятков секунд, а покрышки дорогостоящих зарубежных машин крошились в пыль. Поэтому действия отечественного колесного робота-вездехода произвели настоящий фурор. Ведь он показал себя в буквальном смысле «мастером на все руки» — копал траншеи, разбирал завалы, возводил бетонные стены, к тому же оказался долговечным да и недорогим. Тогда, летом 1986 года, журналистам, живописавшим достоинства многорукого автомата, невдомек было, что его создатели — специалисты ленинградского Центрального научно-исследовательского и опытно-конструкторского института робототехники и технической кибернетики (ЦНИОКИРТК) вообще-то проектируют совсем другую продукцию — оборудование для поиска вернувшихся на Землю космических аппаратов, системы мягкой посадки «Союзов» и «Миров», комплексы контроля герметичности орбитальных станций и т.п.
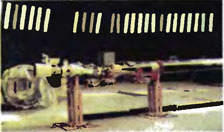 Пространственный стенд в ЦНИОКИРТК. Один из манипуляторов с имитацией кабины «Бурана». |

Полет американского «Атлантиса» нынешним летом проходил строго по программе. Астронавты, выполнив намеченное, приступили к завершающей операции: выводу на околоземную орбиту нового спутника. Но механический манипулятор (заметим, единственный) неожиданно допустил сбой. Спутник, хотя и вышел из грузового отсека, в путь отправился по нерасчетной орбите.
Как раз в те же дни инженеры и исследователи из Санкт-Петербурга заканчивали испытания отечественного космического комплекса с двумя манипуляторами. «Российский космос цепляется за жизнь обеими руками» — такие снисходительно-ироничные заголовки появились в некоторых газетах. Однако специалисты из НАСА восприняли новость отнюдь без улыбки. Кто-кто, а они-то помнили, что неполадки американской «руки» случались и прежде. Например, в предпоследнем полете «Шаттла» астронавтам лишь неимоверными усилиями удалось «снять» с орбиты отработавший зонд. Так что неудивителен тот весьма острый интерес, который НАСА проявило к нашей разработке.
Программа космических исследований с помощью «Бурана» предполагала его оснащение сразу двумя механическими «руками» — основной и резервной. Их проектирование, учитывая чернобыльский опыт, поручили коллективу ЦНИОКИРТК. Все известные ранее манипуляторы проектировались для работы в земных условиях. А как имитировать невесомость? Рассматривались различные варианты: погружение в воду, воздушная подушка, система противовесов. Бассейн отвергли сразу же — подвижность сочленений «руки» обеспечивается электродвигателями, для которых вода — не самая лучшая среда. Противовесы громоздки и дороги. Остановились на аэроподушке. Для этого построили так называемый «плоскостной стенд для отработки движения деталей и узлов манипулятора в двухмерном пространстве (плоскости) в условиях невесомости». Представьте себе просторное помещение с идеально ровным покрытием площадью около 100 м2. На нем устанавливаются пневмоопоры для обезвешивания отдельных звеньев сложных механических систем. Под мощной струей подаваемого снизу, из пневмоопор, воздуха подвижные сочленения гигантского «кузнечика» начинали левитировать.
Испытания на плоскостном стенде показали, что основные рабочие характеристики механизма (скорость перемещения звена, сопротивление движению) оказались не хуже, чем у заокеанского аналога. Но если американские инженеры, создававшие «руку» под программу «Шаттл», на этой стадии посчитали свою работу выполненной, то наши решили идти дальше.
Пространственный стенд по сравнению с плоскостным выглядит как футбольное поле рядом с волейбольной площадкой. Его высота — почти как у 6-этажного дома, площадь основания — свыше 200 м2. Громадный объем сооружения — следствие использования противовесов для разгрузки шарнирных соединений. Введение их в конструкцию — мера вынужденная. Ведь движущийся сразу по всем трем координатам узел «руки» пневмоопорами не обезвесить.
Когда я впервые увидел стенд, то первое впечатление было — среди приборов и вспомогательных механизмов закреплено что-то весьма тяжеловесное. Однако оно оказалось обманчивым. Масса 15-метрового манипулятора — всего 360 кг. Причина тому — его «суставы» изготовлены из композитного углепластика, имеющего малый удельный вес, но высокую прочность. Последнее обстоятельство тоже очень важно. «Плечи» и «локти» способны выдерживать полутонные нагрузки и перемещаться при этом со скоростью 0,5 м/с. Ну а коль скоро мы перешли к «анатомическим» терминам, то нельзя не сказать о «кистях». Они... зрячие.
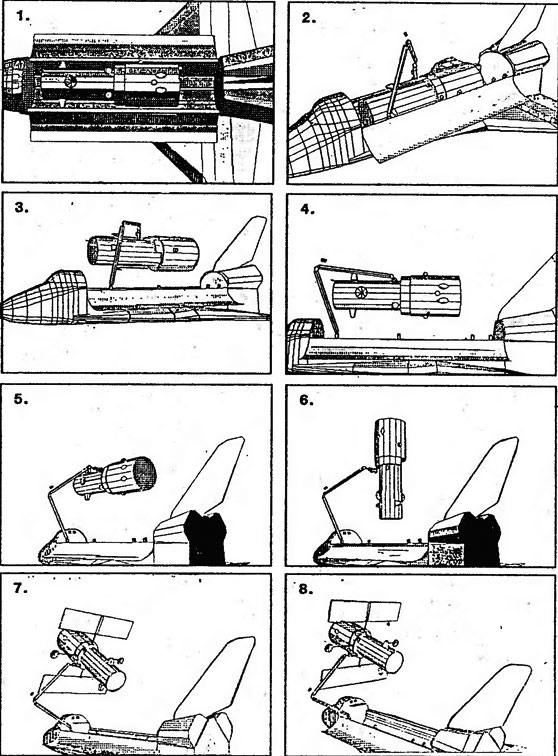 Так должен был действовать манипулятор «Атлантиса» при выводе на орбиту срочного груза НАСА. Но желаемое оказалось далеким от действительного. (Цифрами обозначена последовательность действий «руки».) |
Электромеханики бережно держали некую причудливую конструкцию, напоминающую трилистник клевера. То и была «кисть». Она должна схватить находящийся на космическом корабле зонд своими лепестками и отправить его в самостоятельный полет. Между этими «пальцами» расположен стальной штырь с закрепленным на его конце подшипником. Внутренняя поверхность «ладони» покрыта твердой смазкой. При захвате подшипник проскальзывает в специально — оборудованный приемный узел зонда. Есть предварительное сцепление! Дальше «пальцы» плавно сжимаются, фиксируют груз и выводят его в открытый космос. Если же надо «снять», допустим, спутник с орбиты, то операции делаются в обратном порядке. И не на ощупь. Оператор смотрит на объект в прямом смысле сквозь «пальцы», поскольку «кисть» снабжена телекамерой и светильниками.
Но вернемся к пространственному стенду. На нем конструкторам удалось отработать уникальное программное обеспечение для бортовой ЭВМ, которая позволяет полностью автоматизировать действия манипуляторов, имеющих высокую подвижность. В отличие от единственной «шаттловской» «руки», способной перемещаться только по плоскостям, наш двурукий аппарат обладал бы и другим важным преимуществом: управлять «кузнечиками» можно и с Земли по радио. Из космоса в Центр управления полетами (ЦУП) поступит огромный массив телеметрической информации о положении их самих и перемещаемых ими предметов, а в ответ — столь же крупный массив команд управления в память бортовой ЭВМ.
Но читатель, видимо, обратил внимание на слова «должна», «обладал бы»... Каковы же перспективы? Ведь «Бурану», судя по всему, больше не суждено выходить на стартовые площадки космодромов. А это означает: не нужны больше и манипуляторы. Надо отдать должное конструкторам — побывав в нокдауне, они сумели оправиться. «Система может работать и на других космических объектах, — сказал мне ведущий инженер ЦНИОКИРТК Альберт Багдасарян. Для ее установки не требуется каких-либо переделок, просто к бортовой ЭВМ подключается дополнительный блок, корректирующий имеющиеся программы к конкретным условиям работы. Подобные блоки могут быть сделаны для различных долговременных космических станций и спутников, работающих в автоматическом режиме. Не является исключением и «Шаттл».
То, что механическая «рука» будет работать в космосе, если уж не на нашем, так на американском пилотируемом комплексе, сомнений у ее создателей не вызывает. Правда, еще совсем недавно совместное сотрудничество на орбите представлялось куда радужнее: от рукопожатия экипажей «Союза» и «Аполлона» в 1974 году к «рукопожатию» манипуляторов, выводящих в пространство советско(российско)-американские спутники. В некогда популярном шлягере «Огромное небо» были слова:
«...рукою до звезд дотянуться смогли». Жизнь внесла свои непредсказуемые поправки. И, как ни пой, выходит, что «рука Москвы» (то бишь Петербурга) прикоснется к тайнам космоса скорее с борта «Атлантиса» или другого корабля проекта «Шаттл».
P.S. Когда материал был уже подготовлен, стало известно; что на 1993 год все-таки планируется полет «Бурана». Правда, пока не ясно — с космонавтами или в беспилотном варианте. Впрочем, для манипулятора все равно, откуда поступают команды — с Земли или с орбитальной станции. Ждем «рукопожатия»?