

|
Ежегодник 1967 г Программа «Лунар орбитер». (LOPP*). Предусматривает запуски (с трехмесячными интервалами) пяти космических аппаратов «Лунар-орбитер». Основное назначение аппаратов - фотографирование с орбиты участков поверхности Луны с целью определения их пригодности для посадки лунной кабины космического корабля «Аполлон», а также отработка системы вывода аппаратов на селеноцентрическую орбиту. * Lunar Orbital Photographic Project - проект лунного орбитального аппарата с фотооборудованием. «Лунар орбитер I» («Лунар орбитер А»). При запуске, кроме основной задачи, предусматривалось проведение исследований радиационной и метеорной обстановки у Луны и изучение ее гравитационного поля. Вес аппарата (рис. 4) 386 кг, высота 1,68 л, размах по антеннам 5,61 м, по панелям с солнечными элементами - 3,96 м. На борту аппарата смонтированы: двухкамерная фотоустановка (съемка производится одновременно обеими камерами; при съемке с номинальной высоты - 46 км, камера 1 обеспечивает разрешающую способность 8 м, камера 2 - 1 м); энергетическая установка, включающая 10856 солнечных элементов (330 вт), и аккумуляторную батарею (12 а-час); система ориентации и стабилизации, включающая инерциальный блок (3 гироскопа), солнечные датчики, датчики звезды Канопус и управляющие реактивные сопла, работающие на сжатом азоте; бортовой ЖРД тягой 45 кг (на самовоспламеняющемся топливе), предназначенный для коррекции траектории на ее среднем участке, вывода аппарата на селеноцентрическую орбиту и перевода с одной селеноцентрической орбиты на другую; программно-временное устройство (ПВУ), куда вводятся команды с Земли (ПВУ должно использоваться во время полета аппарата над невидимой стороной Луны); два передатчика: один мощностью 0,5 вт, другой - 10 вт; всенаправленная антенна для приема команд, траекторных измерений и передачи телеметрических данных; остронаправленная антенна (ширина диаграммы направленности 10°) для передачи изображений. 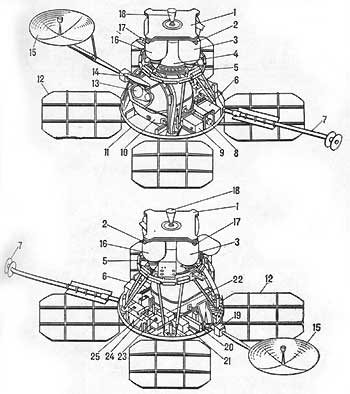 Рис. 4. Космический аппарат «Лунар орбитер 1». 1 - теплозащитный экран; 2 - солнечный датчик грубой ориентации; 3- бак окислителя; 4 - несущая конструкция; 5 - детектор метеорных частиц; 6 - программно-временное устройство; 7- всенаправленная антенна; 8 - датчик звезды Канопус; 9- инерциальный блок; 10 - фотоустановка; 11 - платформа для монтажа оборудования; 12 - панель с солнечными элементами; 13 - объективы камер; 14 - теплоизолярующая крышка объективов; 15 - остронаправленная антенна; 16 - бак горючего; 17 - управляющие реактивные сопла системы ориентации; 18 - бортовой ЖРД; 19 - привод антенны 15; 20 - усилитель на ЛБВ; 21 - декодирующее устройство; 22 - кодирующее устройство и мультиплексор; 23 - аккумуляторная батарея; 24 - передатчик; 25 - оборудование энергетической системы. Ракета-носитель «Атлас-Аджена D» была запущена 10 августа в 19 час. 26 мин., вторая ступень с аппаратом вышла на промежуточную геоцентрическую круговую орбиту высотой 185 км и обращалась по ней 28 мин., затем ее двигатель был включен вторично и она, выведя аппарат на траекторию полета к Луне, отделилась. Первая коррекция была проведона 11 августа, от второй коррекции отказались. 14 августа с помощью бортового ЖРД аппарат вышел на селеноцентрическую орбиту с периселением 188 км, апоселением - 1865 км и наклонением к плоскости лунного экватора 12,20°; период обращения 217,2 мин. 18 августа началось фотографирование полосы лунной поверхности шириной ~ 150 км. Съемка производилась в период прохождения периселения, было сделано 20 пар снимков, которые передавались на Землю с 18 по 21 августа. 21 августа был снова включен бортовой ЖРД, и аппарат перешел на расчетную орбиту с периселением 58 км, апоселением 1847 км и наклонением 12,32°. 22 августа проводилось фотографирование участков лунной поверхности. Вследствие неисправности устройства для компенсации сдвига изображений снимки, сделанные с помощью камеры 2, получались смазанными. 25 августа бортовой ЖРД был включен снова и перевел аппарат на орбиту с периселением 39,6 км. Съемка с меньшей высоты, однако, не улучшила качество снимков. Фотографирование закончилось 29 августа, было сделано 215 пар снимков. Помимо снимков лунной поверхности, на Землю были переданы также два снимка Земли, сделанные 23 и 24 августа. Согласно расчетам, аппарат примерно через полгода должен был упасть на Луну, а до этого момента слежение за ним и прием от него телеметрической информации должны продолжаться. Однако 29 октября по команде с Земли был включен бортовой ЖРД, аппарат сошел с орбиты и, согласно расчетам, упал на невидимую сторону Луны. Сообщалось, что это было сделано для того, чтобы поступающие от него сигналы не помешали связи с аппаратом «Лунар орбитер В», запуск которого был запланирован на 6 -12 декабря. |
В рамках программы Apollo NASA планировало изучение лунной поверхности космическим аппаратом, выводимым на селеноцентрическую орбиту. Изучение лунной поверхности предполагалось провести в районах, намечаемых для посадки лунной кабины корабля Apollo. Первоначально для этой цели планировалось использовать вариант космического аппарата Surveyor (Surveyor В), выводимого на селеноцентрическую орбиту, получить телевизионные изображения лунной поверхности и провести исследования окололунного пространства. В связи с сокращением бюджета NASA на 1964 г. руководство NASA приняло решение отказаться от разработки аппарата Surveyor В. Это объяснялось и тем, что для запуска этих аппаратов предполагалось использовать ракету-носитель Atlas-Centaur, находившуюся в 1964 г. в стадии отработки, а аппараты Lunar Orbiter проектировались в расчете на более дешевую и полностью отработанную ракету-носитель Atlas-Agena D. Для решения указанных задач в августе 1963 г. NASA приняло решение о создании менее сложного и более дешевого аппарата LOPP (Lunar Orbiter Photographic Project- проект выводимого на селеноцентрическую орбиту аппарата с фотооборудованием), получившего впоследствие наименование Lunar Orbiter. Руководство разработкой и изготовлением аппаратов Lunar Orbiter NASA возложило на Научно-исследовательский центр им. Лэнгли. В 1963 г. Центром Лэнгли был объявлен конкурс на получение контракта, предусматривающего разработку аппарата Lunar Orbiter (31). В конкурсе участвовало 5 фирм. На первом этапе были отобраны проекты Boeing Co. и Hughes Aircraft Co. Проект Boeing Co. предусматривал создание аппарата с ориентацией по трем осям, а проект Hughes-Aircraft Co.-аппарата, стабилизируемого вращением. В результате рассмотрения проектов был заключен контракт в размере 60 млн. долл. с Boeing Co., хотя стоимость его реализации была почти вдвое больше. Такой выбор объясняется тем, что в проекте Boeing Co. предусматривались более эффективные меры по обеспечению надежности аппарата и обеспечивалась более точная ориентация аппаратов, основным назначением которых является фотографирование лунной поверхности (2). Контрактом предусматривалось, что за каждый успешный запуск фирма будет дополнительно получать 5,3 млн. долл. Предполагалось создание 10 летных образцов, но впоследствии принято решение изготовить 8 образцов: три экспериментальных аппарата для наземных испытаний и 5 летных аппаратов (9). Изготовление экспериментальных образцов началось в сентябре 1964 г. на заводе Boeing Со. в г. Сиэтле, а летных образцов- во второй половине 1965 г. В 1964 г. число сотрудников Boeing Co., участвовавших в разработке аппарата, достигло 1200 человек, в том числе 800 человек, освобожденных от всех прочих работ. При проектировании аппарата Lunar Orbiter выбиралось бортовое оборудование, проверенное в полете или в ходе длительных наземных испытаний. Система энергопитания, включающая солнечные элементы и никель-кадмиевые батареи, успешно использовалась на спутниках Relay, TIROS и космическом аппарате Ranger. Аппарат и комплектующие системы проходили длительные наземные испытания. В ноябре 1965 г. изготовлен первый экспериментальный образец аппарата для наземных испытаний, которые предусматривали имитацию теплового режима при полете аппарата к Луне и обращении по селеноцентрической орбите. В январе 1966 г. в Центре космических исследований Boeing Со начались испытания экспериментального образца в термобарокамере высотой 15,2 м. В камере создавался вакуум, соответствующий высоте 180 км, и температуры в диапазоне от минус 149° до плюс 121° С. Испытания продолжались около трех недель, изучалась работоспособность системы фотографирования-было осуществлено фотографирование, обработка пленки и передача изображении. Испытания корректирующего двигателя проводились в имитированных высотных условиях на испытательной станции Boeing Co. в г. Тьюлалип. Для перевозки аппаратов Lunar Orbiter с завода в г. Сиэтле на м. Кеннеди использовались специальные фургоны, в которых аппараты размещаются на амортизирующем подвесе, снабженные системой кондиционирования, обеспечивающей заданную температуру и влажность. Стоимость пяти фургонов - около 236 тыс. долл. Этапы осуществления программы приведены ниже.
Основная цель запуска (6, 10, 36) -отработка программы выведения аппаратов Lunar Orbiter на селеноцентрическую орбиту и перевода аппаратов с одной орбиты на другую. Аппарат Lunar Orbiter предназначался для решения задач по фотографированию 9 участков экваториальной зоны лунной поверхности с целью определения их пригодности для посадки лунной кабины корабля Apollo (для посадки были выбраны участки в полосе, ограниченной селенографическими координатами 5° с. ш., 5° ю. ш., 45° з. д., 45° в. д.; общая длина полосы фотографирования - 2 580 км, ширина - 193 км); изучения радиационной и метеорной обстановки по трассе полета и в районе Луны; определения параметров гравитационного поля Луны и испытания бортового оборудования.
Типовая программа полета ракеты-носителя Atlas-Agena D и вывода аппаратов на траекторию полета к Луне для всех аппаратов аналогична. Программой предусматривается вывод II ступени с аппаратом на промежуточную круговую орбиту высотой 185 км, по которой она обращается 20-35 мин. После повторного включения двигателя II ступени, который работает 92 сек., и отделения аппарата от ступени, аппарат переводится на траекторию полета к Луне. Затем (через 30 сек.) развертываются панели с солнечными элементами и антенны и аппарат ориентируется таким образом, чтобы панели были направлены на Солнце, а остронаправленная антенна на Землю. Для вывода аппарата на селеноцентрическую орбиту предусматривается проведение 2-х коррекций на среднем участке траектории: первая через 15 час., вторая-через 70 час. после старта. Через 89,5 час. после старта на расстоянии 885 км от Луны включается на 9,5 мин. двигательная установка, осуществляющая перевод аппарата на начальную селеноцентрическую орбиту с высотой периселения 200 км и апоселения - 1 850 км, наклонением орбиты к плоскости лунного экватора 12° и периодом обращения 3,5 час (32, 45). Для проверки работы фотоустановки фотографирование первоначально производится с этой орбиты. Через 3-8 суток после вывода на начальную орбиту, после того как подтвердится, что значительных аномалий в гравитационном поле Луны нет, двигательная установка переводит аппарат на орбиту с высотой периселения 40-50 км, при этом апоселений почти не меняется. После перевода на эту орбиту начинается программное фотографирование выбранных участков лунной поверхности (53). Фотографирование продолжается в течение недели. Часть полученных снимков обрабатывается на борту аппарата и после сеансов фотографирования передается на Землю для экспресс-анализа. Основная же часть снимков обрабатывается и передается на Землю по окончании сеансов фотографирования, для чего требуется еще несколько недель (5). После передачи снимков аппарат в течение нескольких месяцев используется для изучения метеорной и радиационной обстановки в районе Луны, гравитационного поля Луны, юстировки наземных станций командно-измерительного комплекса слежения по программе Apollo и испытаний бортового оборудования. Расчетная продолжительность активного существования аппарата - 1 год. После почти полной выработки запаса сжатого азота в системе ориентации, с Земли подается команда на включение двигательной установки для торможения аппарата, что приводит к его падению на Луну. Операция по уничтожению аппаратов предусмотрена для того, чтобы освободить частотный диапазон, в котором ведется с ним связь.
Запуск аппарата Lunar Orbiter А произведен 10 августа 1966 г. в 19 час. 26 мин. 0,7 сек. со стартового комплекса № 13 м. Кеннеди ракетой-носителем Atlas-Agena D. Двигатель II ступени, проработав 154,2 сек., вывел ее с аппаратом на промежуточную круговую орбиту высотой 185 км, по которой они обращались 28 мин, после чего двигатель был включен вторично и проработал 88,4 сек, и аппарат вышел на траекторию полета к Луне (1). После выхода аппарата Lunar. Orbiter А на траекторию полета к Луне он получил название- Lunar Orbiter I, по международной системе обозначение 1966-73А. Через 49 мин. после старта солнечные датчики захватили Солнце и была проведена ориентация аппарата. Захват Канопуса не удался и ориентация аппарата перед коррекцией проведена по Луне датчиком Канопуса. Этот отказ объясняется тем, что в поле зрения датчика попадал отраженный овет от всенаправленной антенны, «ослепляющий» его чувствительные элементы. Для вывода аппарата на селеноцентрическую орбиту предусматривалось проведение 2-х коррекцией траектории. Проведенные расчеты показали, что без коррекции траектории аппарат прошел бы мимо Луны на расстоянии 9 000 км. 12 августа в 00 час., когда аппарат находился на расстоянии 200 000 км от Земли, проведена коррекция траектории. От проведения второй коррекции руководство полета отказалось ввиду того, что первой коррекцией были обеспечены расчетные параметры траектории полета аппарата к Луне. 13 августа при подлете к Луне датчик захватил Канопус и маневры аппарата перед проведением коррекции по переводу на начальную селеноцентрическую орбиту производились с использованием ее в качестве опорного светила. 14 августа в 15 час. 34 мин. была включена двигательная установка и аппарат выведен на начальную селеноцентрическую орбиту (в скобках указаны расчетные значения) (20): высота периселения - 203 км (200), апоселения - 1 847 км (1 850), наклонение-12,14° (12,04), период обращения- 3 час. 37 мин. 35 сек. (3 час. 36 мин. 11 сек.).
15 августа, на 6-ом витке, для проверки бортового и наземного оборудования проведена пробная передача изображений, заложенных в фотоустановку на Земле. Пробный сеанс представлял собой 18-минутную передачу черных и серых тонов, геометрических фигур и имитаций изображений Луны. Переданные с аппарата сигналы были приняты станциями слежения в Голдстоуне и Робледо-де-Чавела. Во время пробного сеанса переданы 34 кадра пленки, которая была проявлена и обработана перед запуском, а затем помещена в фотоустановку. Эти испытания прошли успешно. 18 августа в 15 час. 42 мин., на 26 витке, началось фотографирование полосы шириной 149 км, простиравшейся от 86° в. д. до 94° в. д. Перед сеансом фотографирования аппарат был ориентирован поворотами по крену на 3,6°, рысканию на 12,15° и тангажу на 8,1°. Повороты совершались со скоростью 0,5 град/сек, а интервалы между маневрами равнялись 51,2 сек. Всего сделано 20 пар снимков, в т. ч. первый снимок обратной стороны Луны, которые передавались на Землю с 18 по 21 августа (27). Высота Солнца над горизонтом во время съемки составляла 20° (24). Съемка производилась в период прохождения аппаратом периселения. Изображения, полученные камерой 11, были смазаны из-за неисправности устройства, компенсирующего сдвиг изображения. 21 августа в 7 час 50 мин была включена двигательная установка и аппарат перешел на новую орбиту с высотой периселения 58 км, апоселения 1 847 км и наклонением 12,32°. Перед включением двигательной установки аппарат был ориентирован поворотами по крену на 33,4° и по тангажу на 25,3° (45). Первоначальной программой предусматривалось фотографирование 10 участков поверхности Луны, но затем число участков было сокращено до 9. В таблице 12 приведены координаты участков, которые должны были быть сфотографированы в соответствии с первоначальной программой. Участки №№ 1-9 фотографируются с целью выяснения возможности посадки лунной кабины корабля Apollo, а участки №№ 3-10-посадки аппаратов Surveyor. В дальнейшем программа фотографирования была изменена. Новой программой предусматривалось фотографирование участков №№ 1-7, а вместо участков №№ 8-10 были выбраны участок № 8.1 с центром в точке с координатами 3° ю. ш. и 36°30' з. д. и участок № 9.1 с центром в точке с координатами 2°21' ю. ш. и 43°22' з. д. Участок № 9.1 представлял также интерес в связи с тем, что на нем совершил посадку аппарат Surveyor I (6). На рис. 31 показаны районы лунной поверхности, выбранные для фотографирования аппаратом Lunar Orbiter I. По заявлению руководства NASA участок будет признан пригодным для посадки лунной кабины корабля Apollo, если в его пределах будут обнаружены площадки размером 7х7 км, имеющие наклон не более 7° и не имеющие «ям» и «камней» с поперечными размерами более 2 м и глубиной (высотой) более 0,5 м (10). В полете аппарата Lunar Orbiter I были получены снимки камерой 1.
| №№ участков | Селенографические координаты центра участка | Примечание | |
| широта | долгота | ||
| 1 | 0°50' ю. ш. | 42°20' в. д. | Морской район, включает часть Моря Изобилия (один из районов посадки лунной кабины корабля Apollo) |
| 2 | 0°10' ю. ш. | 36°00' в. д. | Плато вдоль западного побережья Моря Изобилия. |
| 3 | 0°20' ю. ш. | 24°50' в. д. | Морской район, охватывает южную часть Моря Спокойствия. |
| 4 | 0°00' | 12°50' з. д. | Плато на экваторе между кратерами Теон Старший и Годен. |
| 5 | 0°25' ю. ш. | 1°20' з. д. | Морской район, охватывает южную часть Центрального залива |
| 6 | 4°00' ю. ш. | 2°50' з. д. | Плато с кратерами Шпорер и Фламмарион. |
| 7 | 3°45' ю. ш. | 22°45' з. д. | Морской район, расположен в Океане Бурь. |
| 8 | 3°00' ю. ш- | 35°30' з. д. | Район в Океане Бурь. |
| 9 | 3°15' ю. ш. | 43°50' з. д. | Район в Океане Бурь. |
| 10 | 3°40' ю. ш. | 50°05' з. д. | Район в Океане Бурь. |

Фотографирование производилось вскоре после восхода Солнца в данном районе, чтобы по длине тени можно было определить размеры мелких элементов рельефа. Каждый участок предполагалось сфотографировать 16 раз, а участок-№ 9.1-32 раза. 22 августа с высоты 58 км сделано 2 серии снимков участков №№ 1 и 2. Из-за неисправности устройства для компенсации сдвига изображения снимки, сделанные камерой II, получились смазанными (при пробной съемке с высоты 1500 км без использования компенсирующего устройства снимки, сделанные камерой II, имели удовлетворительное качество). Каждая серия состояла из 32 снимков, полученных обеими камерами. В тот же день началась передача этих снимков на Землю. 23 и 24 августа были получены 2 снимка Земли с селеноцентрической орбиты, а 25 и 26 августа они переданы и приняты станцией в Робледо-де-Чавела. Полученные онимки являются первыми, на которых Земля зафиксирована в ее серповидной последней четверти. С помощью этих фотографий возможно установить, как наличие атмосферы сказывается на терминаторе и насколько земной терминатор отличен от лунного, который из-за отсутствия на Луне атмосферы представляет собой очень четкую линию. Предполагаемая причина неисправности компенсирующего устройства- подавление посторонним сигналом сигнала, идущего в компенсирующее устройство от датчика «высота-скорость». Для устранения этого было принято решение перевести аппарат на орбиту с более низким переселением, что, как предполагалось, должно привести к увеличению силы сигнала отдатчика «высота - скорость», а это должно подавить построенный сигнал. 25 августа в 17 час. 0,1 мин. была включена двигательная установка и аппарат перешел на более низкую орбиту с параметрами (в скобках указаны параметры до маневра): высота периселения 39,6 км (49), апоселения- 1818 км (1855), наклонение-12,32°, период обращения--3 час. 30 мин. Однако, съемка с меньшей высоты не привела к улучшению качества снимков, полученных от камеры II. В частности, не удалось получить снимки участка № 9.1 с разрешающей способностью, достаточной для того, чтобы различить аппарат Surveyor I и выяснить, имеются ли на сфотографированных участках «ямы» и «камни», которые могут препятствовать посадке лунной кабины Apollo. Всего получено 32 снимка участка № 9,1. К 26 августа аппарат принял с Земли 1917 команд и выполнил 108 различных маневров. Было получено 138 пар снимков, в том числе 2 снимка Земли и 15 снимков обратной стороны Луны, из них было передано 22 пары снимков. 29 августа в 13 час. 23 мин. на 57 витке фотографирование было завершено. Всего от двух камер получено 212 пар снимков, охватывающих площадь около 5,2 млн. км2. Каждая пара снимков включает в себя снимок камер I и II. С низкой селеноцентрической орбиты отснято 9 участков поверхности Луны: 8 участков с целью оценки и пригодности для посадки лунной кабины корабля Apollo и девятый, на котором совершил посадку аппарат Surveyor I, для получения его изображения. К моменту завершения фотографирования аппаратом выполнено 2597 команд и совершено 176 маневров. Точность выполнения маневров была достаточно высокой, это объясняется тем, что уход гироскопов достигал 0,4 град/час (расчетная величина-1 град/час) (8) Из 9 участков поверхности, сфотографированных аппаратом, наиболее безопасным для посадки лунной кабины корабля Apollo является участок № 9.1. Этот участок имеет более ровную поверхность (14 кратеров на 1 км2), чем остальные 8 участков (17 кратеров на 1 км2); но и на этом участке имеются камни размером до 30 м, что делает его не очень пригодным для посадки лунной кабины (17). 16 сентября передача снимков на Землю завершилась.
Предполагалось, что аппарат Lunar Orbiter I, выведенный да орбиту с высотой периселения 39,6 км, будет обращаться вокруг Луны в течение 6 месяцев. До момента падения аппарата на Луну осуществлялось слежение за ним, производился прием телеметрической информации и данных от датчиков микрометеоров и радиации (8). За 8 недель полета (до 9 октября) вокруг Луны детекторы не зарегистрировали ни одного пробоя метеорным телом (45). 29 октября в 12 час 25 мин. произведена операция по уничтожению аппарата Lunar Orbiter I, чтобы его сигналы не мешали связи с аппаратом Lunar Orbiter В, запуск которого планировался на ноябрь 1966 г. По команде с Земли была включена двигательная установка, аппарат сошел с орбиты, а через 1 час 05 мин после включения двигательной установки упал на невидимую сторону Луны (40). Место падения имеет координаты: 6°42 с. ш. и 162° в. д. (расчетное значение). Всего до падения аппарат совершил 527 оборотов вокруг Луны. По заявлению представителей NASA основной задачи аппарат Lunar Orbiter I не выполнил. Однако американские астрономы считают, что аппаратом только за первые 7 дней обращения по селеноцентрической орбите получено и передано на Землю больше данных о Луне, чем было получено при наблюдении с Земли за последние 50 лет.
С использованием бортового передатчика проведены эксперименты по бистатической радиолокации поверхности Луны (метод радиолокационных исследований небесных тел, при котором передатчик устанавливается на космическом аппарате, а приемник-на Земле; если приемник и передатчик расположены на Земле, то метод радиолокации называется моностатическим). Американские ученые считают, что метод биcтатической радиолокации открывает путь к двумерному методу картографирования Луны и планет. Это предполагается обеспечить следующим образом. Одна серия сигналов может передаваться с аппарата, отражаться от Луны (планеты) и приниматься на Земле. Другая группа сигналов может быть послана более мощным передатчиком с Земли, затем они, отразившись от Луны (планеты), будут приняты аппаратом и далее ретранслированы на Землю. Сигналы, посланные передатчиком аппарата Lunar Orbiter I и отраженные от поверхности Луны, приняты в то время, когда аппарат находился почти на экваториальной орбите над кратером Кастнер у восточного края лунного диска и приближался к своему периселению (около 40 км). По заявлению специалистов Станфордского университета, проводивших этот эксперимент, принятые сигналы были достаточной мощности.
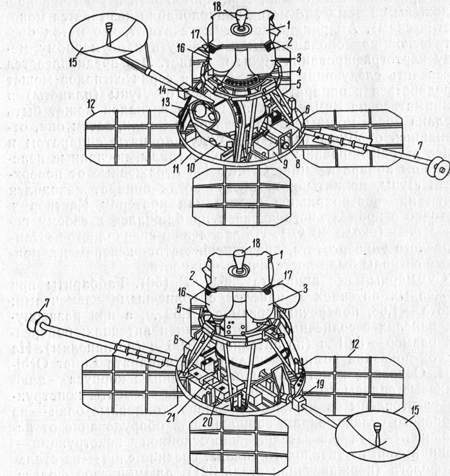
Суммарный вес аппарата 386,9 кГ (56). Габариты при сложенных антеннах и панелях с солнечными элементами: высота-1,68, поперечный размер-1,52 м, а при развернутых панелях с солнечными элементами и антеннах: поперечный размер-5,61 м (по антеннам), 3,96 м (по панелям). На рис. 32 показана компоновочная схема аппарата Lunar Orbiter I. Основные конструкционные материалы корпуса - алюминиевые сплавы 7075 и 2219, некоторые элементы конструкции изготовлены из магниевого сплава, топливные баки - из титанового сплава, экран, защищающий оборудование от истекающей струи двигателя, многослойной конструкции- внешний слой из титанового сплава, средние слои-из стальной фольги (нержавеющая сталь 321), алюминиевой фольги, войлока и рефразила, внутренний слой- из алюминиевого сплава 7075(21). Теплозащитная оболочка, закрывающая почти весь аппарат, изготовлена из чередующихся слоев алюминизированного майлара и дакроновой ткани. Корпус аппарата имеет форму усеченного конуса, верхние и нижние основания которого связаны трубчатыми распорками. К нижнему основанию на шарнирах крепятся 4 панели с солнечными элементами и две антенны, разворачиваемые в полете после сброса обтекателя. Аппарат на ракете-носителе помещен под обтекателем длиной 4,1 м и диаметром 1,68 м. Все служебное оборудование, кроме двигательной установки и оборудования системы ориентации, смонтировано на платформе в нижней части аппарата. Двигательная установка, оборудование системы ориентации и защитный экран крепятся к несущей конструкции в верхней части аппарата.
Фотоустановка и связанное с ней оборудование расположены в контейнере длиной 0,9 м эллипсообразного сечения 0,6 Х 0,45 м (56). На рис. 33 показана принципиальная схема фотоустановки аппаратов Lunar Orbiter. Вес фотоустановки 65,8 кГ, вес телеобъектива камеры 11-7,2 кГ (16). Фотоустановка включает 2 камеры-I и II. Камера I-средней разрешающей способности, снабжена широкоугольным объективом, камера II-высокой разрешающей способности, снабжена телеобъективом. В таблице 13 приведены характеристики камер.
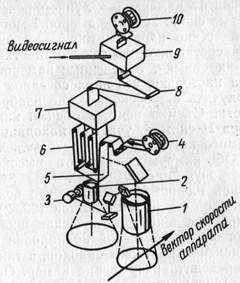
Разрешающая способность камеры II позволяет определить пригодность участков лунной поверхности для посадки лунной кабины корабля Apollo. Снимки, полученные камерой I, предназначены, в основном, для привязки снимков, полученных камерой II, к видимым с Земли ориентирам.
| Индекс камеры | Тип объектива | Разработчик | Размер кадра, мм | Фокусное расстояние, мм | Светосила | Выдержка, сек | Линейная разрешающая способность, м | Размер фотогра- фируемого участка, км |
| съемка с номинальной высоты 46 км | ||||||||
| I | Широкоугольный Xenotar | Schneider-Kreuznach(ФРГ) | 60 Х 60 | 76,2 | 4,5 | 1/25, 1/50 или 1/100 | 8 | 31,6 Х 37,4 |
| II | Телеобъектив Paxoramic | Pacific Optical Co. | 60 X 219 | 610 | 5,6 | 1 | 16,6 Х 4.5 | |


Система энергопитания (11,47) включает 4 панели с солнечными элементами и аккумуляторную никель-кадмиевую батарею. На панелях размещено 10 856 солнечных n-р элементов размером 2 Х 2 см и толщиной 0,3 мм, снабженных синими фильтрами. При максимальной освещенности обеспечивается мощность около 360 вт (максимальная потребляемая мощность 233 вт) при напряжении 31 в. Удельная мощность около 84 вт/м2, к. п. д. преобразования энергии около 8,33%. Площадь панелей около 4,9 м2, активная площадь-4,3 м2. Вес панелей вместе с механизмом, обеспечивающим их удержание в сложенном состоянии, а затем развертывание, - 31,7 кГ. Батарея обеспечивает питание систем аппарата при фотографировании в те периоды, когда солнечные элементы не освещены или освещены Солнцем не в полной мере. Она состоит из 2 идентичных блоков по 10 никель-кадмиевых элементов в каждом, которые обеспечивают емкость 12 а-ч и напряжение 22-31 в. Батарея подзаряжается от солнечных элементов. Вес батареи-13,6 кГ. Изготовитель-Astro-Electronics Div.
Оборудование системы ориентации и стабилизации (47) крепится к несущей части конструкции в верхней части аппарата. Инерциальный блок разработан Sperry Rand Corp. и Sperry Gyroscope Co. и обеспечивает ориентацию аппарата при коррекции траектории на среднем участке полета, торможении при переводе аппарата на начальную и конечную селеноцентрические орбиты, и в период фотографирования. На бериллиевой раме смонтированы 3 одностепенных скоростных поплавковых интегрирующих гироскопа типа SUG-100 длиной 7 см и диаметром 5 см, и один импульсный маятниковый интегрирующий акселерометр типа 16 PIP длиной 6,3 см и диаметром 4 см (50). Дрейф гироскопов в период фотографирования не более 0,3 град/час. Мощность, потребляемая инерциальным блоком, не более 30 вт, вес-5,9 кГ, размеры-17,8 x 25,4 х 17,8 см, блок содержит около 1500 деталей. Солнечные датчики служат: 8-для грубой, 4-для точной ориентации аппарата на Солнце. Четыре датчика грубой ориентации установлены по углам теплозащитного экрана, остальные-на днище аппарата. Разработчик датчиков-Ball Brothers Research Corp. Управляющие реактивные сопла (8 шт.) (9) в качестве рабочего тела используют сжатый азот (вес 6,6 кГ), хранящийся в титановом баллоне диаметром 380 мм под давлением 246 кГ/см2. Азот в сопло подается под давлением 1,33 кГ/см2, тяга каждого сопла-22,7 Г, они смонтированы в вершинах углов квадратного теплозащитного экрана. Сопла разработаны Sterer Engineering and Manufacturing Co. Датчик Канопуса обеспечивает ориентацию аппарата по этой звезде. Система ориентации может работать от ПВУ или по командам с Земли. Максимальная продолжительность непрерывной работы системы от ПВУ- 16 час., что обеспечивает работу в периоды, когда аппарат не управляется по командам с Земли (заход аппарата за Луну, выход из строя станции слежения и др.). Разработчики датчика-International Telephone and Telegraph и ITT Federal Laboratories. Система ориентации рассчитана на работу в 4-х режимах (10):
а) режим крейсерского полета-управляющие сопла работают по командам от солнечных датчиков и датчика Канопуса;
б) режим инерциальной стабилизации-управляющие сопла или система отклонения двигателя (рулевая машинка) работают по командам инерциального блока. В этом режиме система работает в случае потери ориентира в крейсерском полете и в период работы двигательной установки. Стабилизация аппарата по крену и тангажу (±0,2°) обеспечивается отклонением двигателя в шарнирном подвесе;
в) режим маневра-управляющие сопла работают по командам инерциального блока. Команды от двух гироскопов инерциального блока обеспечивают стабилизацию относительно соответствующих осей, а команды от третьего гироскопа обеспечивают маневр (поворот) относительно третьей оси;
г) режим фотографирования-управляющие сопла работают по командам инерциального блока. Стабилизация аппарата по крену и тангажу (±0,2°) обеспечивается аналогично режиму б), а по рысканью должно обеспечиваться нулевое смещение во избежание смазывания изображения.
Корректирующая двигательная установка (10, 59) разработана и изготовлена Marquardt Corp. На аппаратах Lunar Orbiter применен ЖРД МА 109-ХАА. Двигательная установка осуществляет коррекцию на среднем участке траектории, торможение аппарата для перевода его на начальную селеноцентрическую орбиту и изменение этой орбиты. Установка обеспечивает выправление траектории, проходящей из-за ошибок при выведении на расстоянии 16 000 км от расчетной точки, лежащей вблизи Луны. Потребное приращение скорости при первой коррекции 55 м/сек при времени работы двигателя 40 сек. Суммарное приращение скорости при проведении 2 коррекций-91,5 м/сек, изменение скорости для перевода на селеноцентрические орбиты-915 м/сек, резерв-91,5 м/сек. Характеристики двигательной установки: тяга-45 кГ, удельная тяга-275 сек., расход топлива-0,164 кг/сек, запас топлива-125 кГ, компоненты топлива-«аэрозин 50»*+четырехокись азота, вес
* Смесь (1:1) безводного гидразина с несимметричным диметилгидразином.
двигательной установки-147 кГ, время непрерывной работы-730 сек, время работы в импульсном режиме от 1,0 сек до 10 мсек, ресурс-18 сут., обеспечиваемое суммарное изменение скорости-1 098 м/сек. Двигатель. допускает не менее 5 включений, осуществляемых по команде интегрирующего акселерометра по достижении расчетного значения скорости. Двигатель установлен на шарнирном подвесе и крепится к несущей конструкции в верхней части аппарата. Топливо хранится в 4 баках (2 бака окислителя и 2 - горючего) для уменьшения смещения центра масс аппарата по мере расходования. Баки расположены на верхнем основании аппарата. Для предотвращения коррозии бака окислитель помещен в тефлоновый контейнер. Баки изготовлены из титанового сплава. Подача топлива обеспечивается вытеснительной системой, рабочим телом служит сжатый азот (вес 1,8 кГ). Емкость для хранения азота общая с системой ориентации и стабилизации.
Программно-временное устройство (49) служит для ввода в бортовое оборудование команд с Земли и используется во время полета аппарата над невидимой стороной Луны или в случае выхода из строя какой-либо станции слежения. В ПВУ может быть введена программа на 16 час. полета, емкость памяти ПВУ- 128 21-разрядных кодов. Вес ПВУ 7,2 кГ. Разработчик-Electronic Memories Corp.
Приемно-передающие устройства (10,47) предназначены: для приема передаваемых с Земли команд и передачи телеметрической и научной информации. Передатчики (2 шт.) мощностью 0,5 и 10 вт служат для передачи видеосигналов (передатчик мощностью 10 вт) и телеметрических данных (передатчик мощностью 0,5 вг). Всенаправленная антенна, служащая для приема команд, траекторных измерений и передачи телеметрических данных, вынесена на стержне длиной 2,08 м. Остронаправленная антенна с параболическим отражателем служит для передачи изображений. Диаметр зеркала параболического отражателя 0,915 м, ширина диаграммы направленности 10°, ширина полосы сигналов 0,25 Мгц. Отражатель антенны вынесен на стержне длиной 1,32 м и поворачивается шагами по 1°. Вес параболического отражателя 1,05 кГ. В период передачи изображений телеметрические данные передаются также остронаправленной антенной. В системе связи используется также командный приемник. Пропускная способность радиотехнического оборудования при приеме команд с Земли 20 бит/сек, при передаче телеметрических данных о работе бортовых систем и данных о радиационной и метеорной обстановке-50 бит/сек.
Система терморегулирования (47) - пассивного типа. Вся поверхность аппарата снабжена теплоизоляцией за исключением днища, через которое обеспечивается отвод тепла. Днище покрыто специальной белой краской S-13 (разработана Лабораторией реактивного движения) с высоким коэффициентом отражения. В верхней части аппарата установлен теплозащитный экран, снабженный изоляцией, который защищает конструкцию и оборудование аппарата от реактивной струи двигателя. Кроме того, большую часть аппарата защищает теплоизоляционная оболочка, изготовленная из чередующихся слоев алюминизированного майлара и дакроновой ткани. При полете аппарата к Луне под оболочкой поддерживается температура в пределах 4-24° С, в период обращения по селеноцентрической орбите-2-29° С.
Радиомаяк предназначен для определения параметров селеноцентрической орбиты, что позволяет изучать гравитационное поле Луны. Сцинтилляционные счетчики (дозиметры) (2 шт.) предназначены для изучения радиационной обстановки по трассе полета и в районе Луны. Конструктивно дозиметры входят в состав фотоустановки: один-для измерения дозы радиации, полученной неэкспонированной пленкой, второй-экспонированной, но не обработанной пленкой. Если доза приближается к критической, то вся оставшаяся пленка немедленно отснимается и обрабатывается. После окончания съемки и обработки пленки дозиметры используются для измерения радиации в окололунном пространстве (56). Один счетчик установлен рядом с подающей катушкой камеры, другой-на поверхности контейнера с фотооборудованием. Дозиметры разработаны Texas Instruments, Inc.
Детекторы метеорных частиц (20 шт.) предназначены для изучения метеорной обстановки по трассе полета и в районе Луны. Общая площадь поверхности детекторов 0,28 м2. Каждый детектор представляет собой тонкостенный, толщиной 25 μ цилиндр из бериллиевой бронзы или германия, наполненный гелием. При пробое метеорной частицей цилиндра происходит утечка гелия, что регистрирует датчик, размещенный в цилиндре. Детекторы разработаны Центром им. Лэнгли. Параметры гравитационного поля Луны изучаются по эволюции орбиты аппарата. Средства наземных траекторных измерений, с помощью которых регистрируется эволюция орбиты, обеспечивают измерение расстояния до аппарата с точностью ±30 м, а радиальной скорости с точностью ±0,3 м/сек (10,26). Точность определения положения аппарата на селеноцентрической орбите - около 1 км (56).
Слежение и связь с аппаратами по программе Lunar Orbiter осуществлялись станциями системы DSIF (состав и функции системы см. гл. IV, раздел 2). Предварительная реконструкция снимков производилась в Лаборатории реактивного движения и в Центре им. Лэнгли, полная реконструкция - в Картографическом управлении Армии США, детальная обработка снимков велась селенологами NASA и других организаций. Фотографии потенциальных мест посадки лунной кабины корабля Apollo направлялись в Научно-исследовательский центр разработки пилотируемых кораблей (головной по созданию кораблей Apollo).
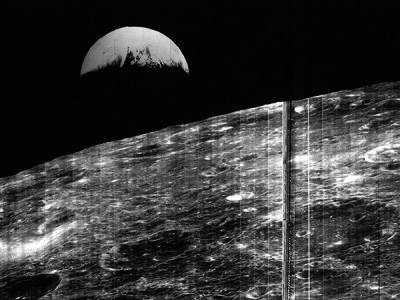 23.08.1966. Расстояние 1476 км от Луны над кратером Пастера. Земля над горизонтом. Терминатор проходит по Черному морю. По-моему, в Ростове вечер. 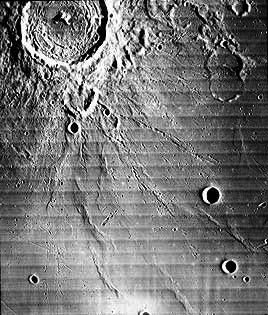 20.08.1966. Расстояние 247 км от Луны. Кратер Тарунций (Taruntius) - тот, что побольше (56 км) 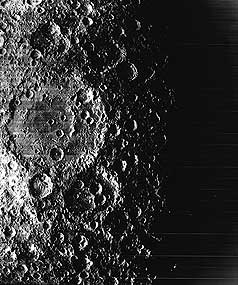 20.08.1966. Расстояние 1466 км от Луны. Кратер Королева 440 км в диаметре на обратной стороне Луны |